(54) ПРИВОД ЗАХВАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1085804A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Хобот манипулятора | 1979 |
|
SU870107A1 |
| Лесопильная рама | 1982 |
|
SU1129071A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2356725C1 |
| Стержневой манипулятор | 1989 |
|
SU1641605A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
| Кисть манипулятора | 1982 |
|
SU1098785A1 |
| Зубчато-рычажное устройство | 1982 |
|
SU1087723A1 |
1
Изобретение относится к робототехнике, в частности к конструктивному исполнению механических систем роботов-манипуляторов.
Известен привод захвата, проходящий через суставы манипулятора и содержащий кинематически связанные между собой стержни, размещенные в шарнирно соединенных звеньях 1.
Недостатком известного устройства является наличие в его кинематической схеме нескольких поступательных пар, что увеличивает потери на трение скольжения.
Целью изобретения является уменьшение потерь на трение.
Для этого привод захвата снабжен шарнирно установленными в качающемся звене двуплечими кривощипами и тягой, концы которой щарнирно связаны с одними из плеч кривощипов, причем другие плечи кривощипов щарнирно связаны со стержнями, а ось тяги совпадает с осью качания звена.
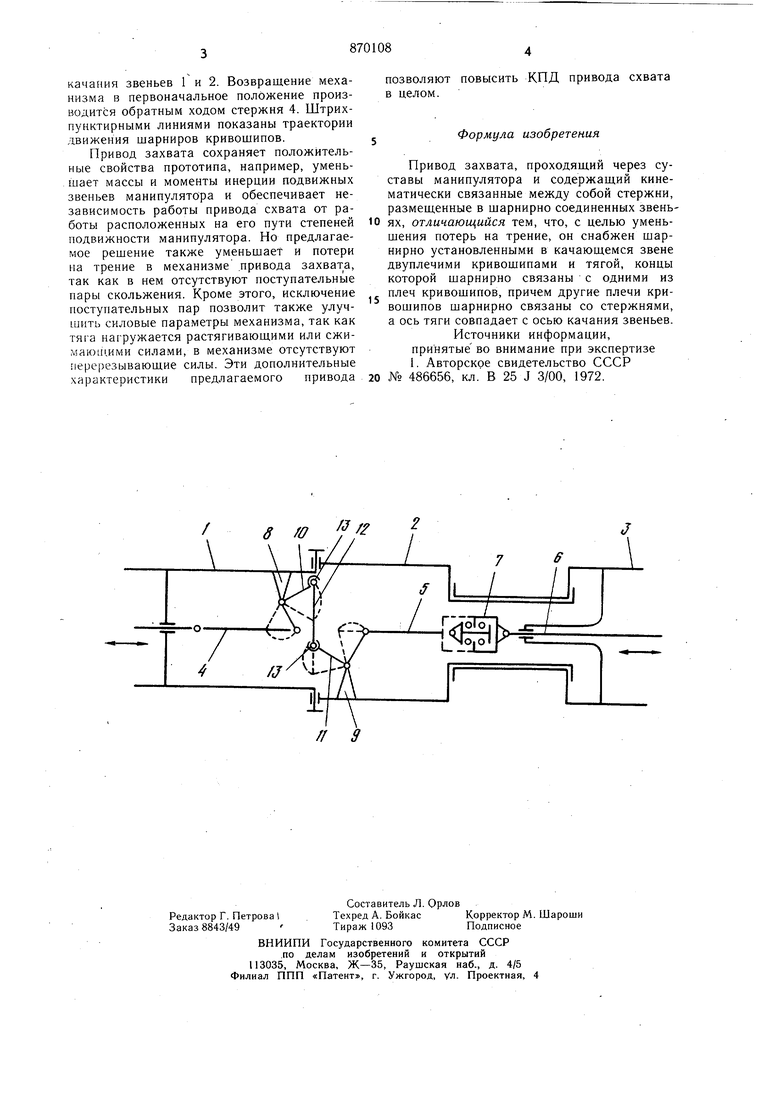
На чертеже показана кинематическая схема привода захвата.
На цапфах звена 1 манипулятора установлено качающееся звено 2, на котором в свою очередь вращается звено 3. В звене 1
перемещается стержень 4, в звене 2 - стержень 5, а в звене 3 - стержень 6. Стержни 5 и 6 соединены между собой устройством 7 развязки, сконструированным на основе упорного подщипника. На звеньях 1 и 2 установлены стойки 8 и 9, на которых качаются двуплечие кривощипы 10 и 11. Встречные концы кривошипов связаны друг с другом при помощи тяги 12, причем ее связь с кривошипами осуществляют универсальные щарниры 13.
Устройство работает следующим образом.
Привод показан на рисунке в крайнем правом положении. Ось тяги 12 расположены вдоль оси качания звеньев 1 и 2, При перемещении стержня 4 влево стержень тянет за собой шарнирно связанное с ним плечо кривошипа 10, который, поворачиваясь на стойке 8, другим плечом воздействует на тягу 12. Тяга, перемещаясь, поворачивает кривошип II, который перемещает стержень 5, а затем и стержень 6. Останавливается привод тогда, когда механизм займет крайнее левое положение (показано на чертеже пунктирными линиями). В этом положении ось тяги 12 также совпадает с осью
качания звеньев 1 и 2. Возвращение механизма в первоначальное положение производится обратным ходом стержня 4. Штрихпунктирными линиями показаны траектории движения шарниров кривошипов.
Привод захвата сохраняет положительные свойства прототипа, например, уменьшает массы и моменты инерции подвижных звеньев манипулятора и обеспечивает независимость работы привода схвата от работы расположенных на его пути степеней подвижности манипулятора. Но предлагаемое решение также уменьшает и потери на трение в механизме привода захвата, так как в нем отсутствуют поступательнью пары скольжения. Кроме этого, исключение поступательных пар позволит также улучшить силовые параметры механизма, так как тяга нагружается растягиваюш,ими или сжи:-. силами, в механизме отсутствуют перерезываюш.ие силы. Эти дополнительные характеристики предлагаемого привода / /ff f ,
//
позволяют повысить кпд привода схвата в целом.
Формула изобретения
Привод захвата, проходящий через суставы манипулятора и содержащий кинематически связанные между собой стержни, размещенные в шарнирно соединенных звеньях, отличающийся тем, что, с целью уменьшения потерь на трение, он снабжен шарнирно установленными в качающемся звене двуплечими кривошипами и тягой, концы которой шарнирно связаны с одними из плеч кривошипов, причем другие плечи кривошипов шарнирно связаны со стержнями, а ось тяги совпадает с осью качания звеньев.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 486656, кл. В 25 J 3/00, 1972. f
