Изобретение относится к ма1ииностроению и может быть использовано при создании промьииленных роботов.
Известна кисть манипулятора, содержащая суставы, образованные качаюн1имся и вращающимся звеньями, и нривод схвага, проходящий через суставы и вьпюлнениьп1 в виде кинематически связанных между собой стержней 1 .
Иедостатком известного устройства являются узкие технологические возможности, обусловленные тем, что в нем не обеспечивается регулировка усилия зажима детали.
Цель изобретения - расп1иренне технологических возможностей.
Указанная цель достигается тем, что в кисти манипулятора, содержащей суставы, образованные качающимся и вращающимся звеньями, и привод схвата, проходян.1ий через суставы и выполненный в виде кинематически связанных между собой стержне, качающееся звено сустава снабжено нанрав ляющей, а конец входного стержня при водароликом, контактирующим с этой направляющей, и серьгой, один конец которой 1нарни) но установлен на входном стержне соосно с роликом, а другой щарнирно связан с выходным стержнем, размещенным по оси вра щающегося звена сустава.
На чертеже изображена кисть, разрез.
Кисть содержит качаюн1ееся звено 1, имсющее разъем по плоскости чертежа, в котором на подщипниках установ,лены входное 2 и выходное 3 конические колеса вран1ающегося звена 4. Внутрь колеса 2 помещен входной стержень 5, один конец которогсо связан с цилиндром нривода схвата, а на другом имеется шарнир 6, к которому нрикренлена серьга 7. Шарнир 6 снабжен роликом 8, который опирается на направляющую
9, установленную н звене 1. Серьга 7 черезшарнир К) связана с в-лходным стержнем 11. установ.ленным в шариковых направляющих на нарнирах во вращающемся звене 4. Ф.лансп 12 схвата .закрек.ляется на вращающемся 3Beiie 4. На фланце 12 установлена ычажная система 3 схвата, связанная с вьгходным стержнем 11 через шарнир 14, представ.1ЯЮЩИЙ co6oii порный нодшигшик.
Кист}, работает следуЮ1 1им образом.
11)и подаче движения на входное зубчатое колесо 2 выходное зубчатое колесо 3 поворачи15ает звено 4 с- закренленны.м на нем (})ланцем 12 схвата и рычажную систему 1.4 схвата вокруг оси В1)1ходпо -о зчбчато14) колеса 3.
При перемеще11ни входного сгержня 5 liiipafu.i .ча счет измснени.я угла наклона серьги 7 ..гержен1 1 1 переместится и через ujapпир 14 пе)еместит рычаги 13 схвата. Ироизойде зажим заготовки. Осевое усилие стержня I I воспримет р(..,лик 8 направляющая ). За того, что в конце зажима угол накл():-1а ccpi.jH относителыю стержня 1 I бли.зок к 11у..лю. усилие на стержне 1 1 в юско.лько раз бо, усилия по входному сгер/{%;п(/.). В{).чвран1ение механизмов в нервона а.Л|)Ное положение производится об)атным ходом (.ге)Ж|1я 5.
Ре;улпро1 ка усилия чажими осуществляyr/ia между стержнем 1 1 o.ia :(аЖ1М11Ьгх рьи-:а1агаем(аЧ1 устройства позволит уменышггь расход пер1оноситс.ля и сокралит) |1а.пи-|)1,1 си.лового ци.1И1:Дра njHiвода :ia счет И1.П:1.1ь.«)ваш1я чтройства увеличения уси.лия зажима, а лакже насграпвалл УСИЛИЯ i;a lyoKax схвата .sa счег изменсгия положе.:ия се)ьги.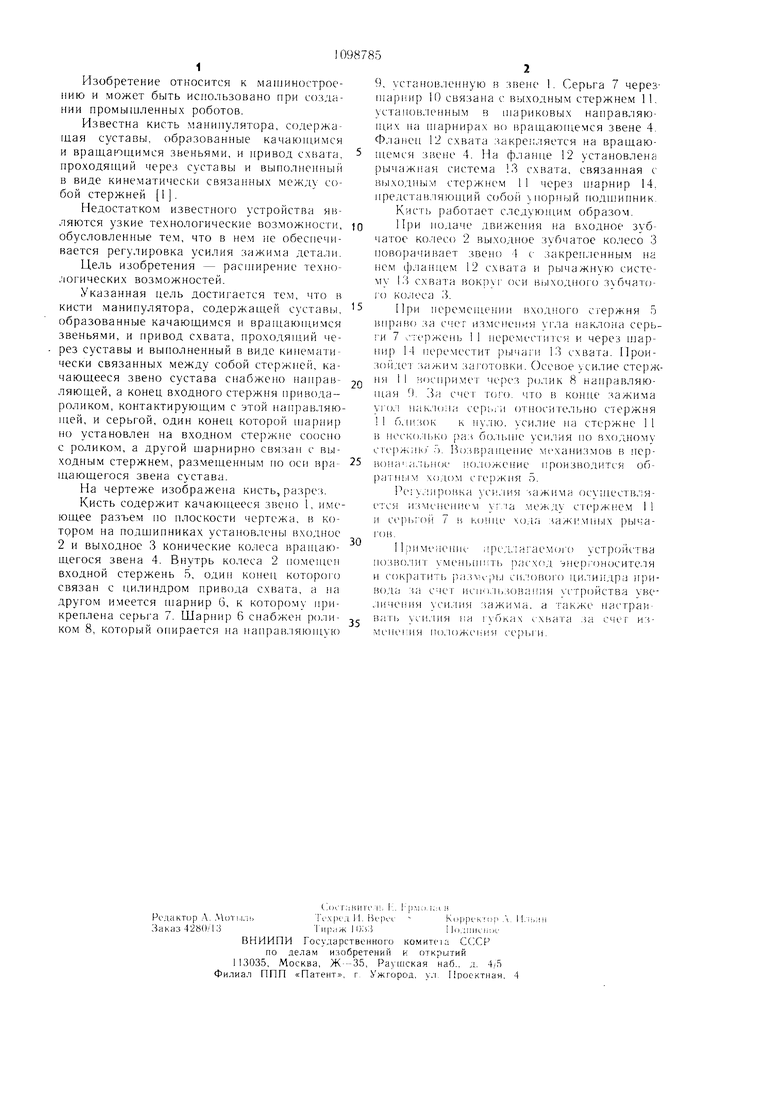
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Привод захвата | 1979 |
|
SU870108A1 |
| ПРИВОД ЗАХВАТА | 1972 |
|
SU423622A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Устройство для управления манипулятором | 1987 |
|
SU1445948A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Манипулятор | 1985 |
|
SU1371899A1 |
| Манипулятор | 1980 |
|
SU1050863A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1987 |
|
SU1517252A1 |
КИСТЬ МАНИПУЛЯТОРА, содержащая суставы, образованные качающимся и вращающимся звеньями, и привод схва та, проходящий через суставы и выполнен СО х 00 СЛ ный в виде кинематически связанных стержней, отличающаяся тем, что, с целью расширения ее технологических возможностей путем увеличения усилия зажима и обеспечения регулировки этого усилия, качающееся звено сустава снабжено направляющей, а конец входного стержня привода - роликом, контактирующим с этой направляющей и серьгой, один конец которой шарнирно установлен на входном стержне соосно с роликом, а другой щарнирно связан с вы.ходным стержнем, размещенным по оси вращающегося звена сустава. /.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Привод захвата | 1979 |
|
SU870108A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
