(54) УСТРОЙСТВО ДЛЯ ПРИВОДА СКВАЖИННЫХ ШТАНГОВЫХ НАСОСОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОВОЙ ПРЕСС | 1973 |
|
SU432002A1 |
| Привод ракеля трафаретной печатной машины | 1980 |
|
SU867678A1 |
| Устройство для управления сверлильным станком | 1980 |
|
SU856680A1 |
| ЭЛЕКТРОНЕФТЕКАЧАЛКА | 2006 |
|
RU2308615C1 |
| ПРИВОД ШТАНГОВОГО СКВАЖИННОГО НАСОСА | 2013 |
|
RU2534636C1 |
| РАЗДЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПЕРЕДВИЖЕНИЯ МОСТОВОГО КРАНА | 2012 |
|
RU2497697C1 |
| Механизм привода главного прямолинейного движения поперечно-строгального станка | 1980 |
|
SU933303A1 |
| Асинхронный двигатель | 1941 |
|
SU64151A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ | 1992 |
|
RU2027299C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПУСКА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДОВ ОТ АВТОНОМНОГО ИСТОЧНИКА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ СОИЗМЕРИМОЙ МОЩНОСТИ | 2014 |
|
RU2596165C2 |
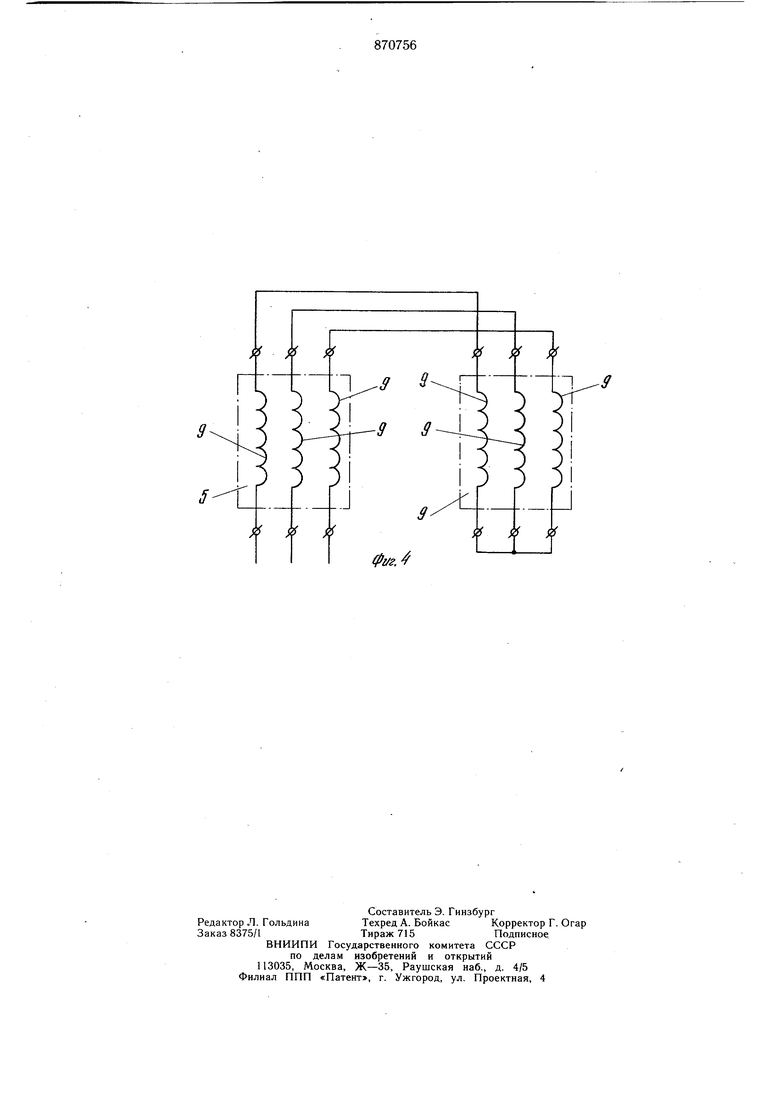
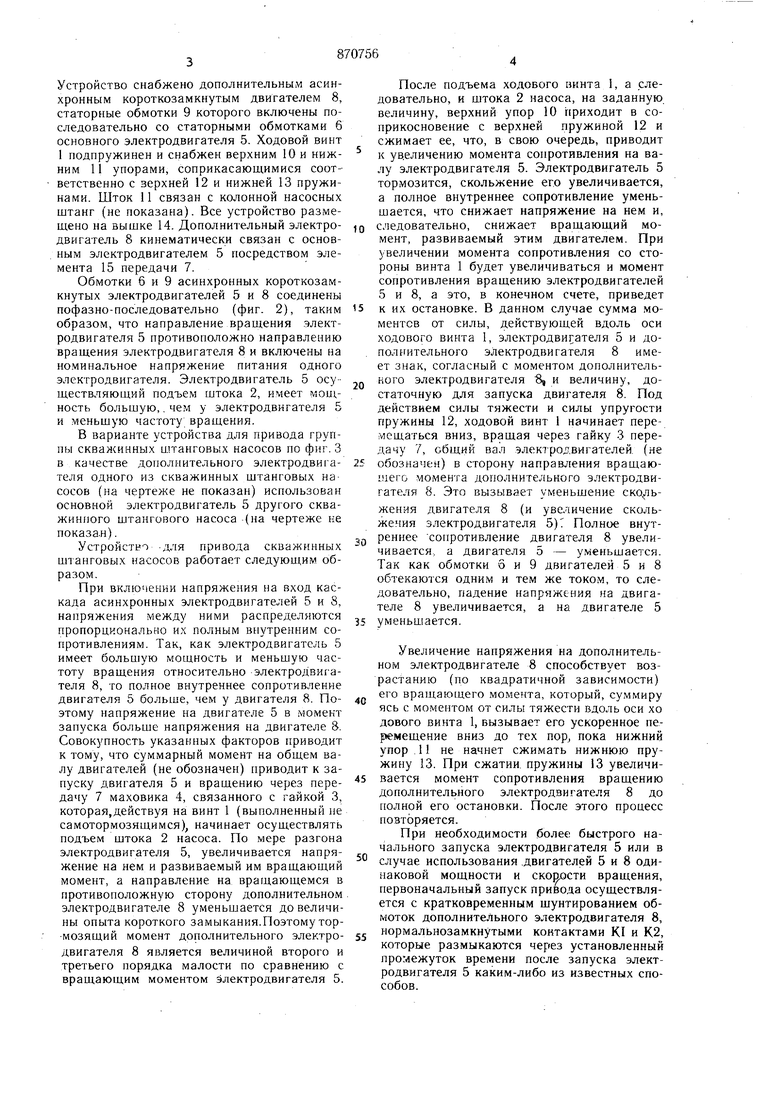
Изобретение относится к технике добычи нефти, в частности к устройствам для привода скважинных штанговых насосов. Известно устройство для привода скважинных штанговых насосов, содержащее ходовой винт, связанный со штоком насоса и взаимодействующий с гайкой маховика, и асинхронный короткозамкнутый электродвигатель со статорными обмотками, связанный с передачей, взаимодействующей с маховиком 1. Недостатком известного устройства является низкая его надежность и экономичность в работе из-за применения реверсивного пускателя, фрикционов и другой аппаратуры для изменения направления вращения приводного электродвигателя. Цель изобретения состоит в повыщении надежности и экономичности работы устройства и упрощения автоматизации управления циклической работой приводов группы скважинных штанговых насосов. Указанная цель достигается тем, что устройство снабжено дополнительным асинхронным короткозамкнутым электродвигателем, статорные обмотки которого включены последовательно со статорными обмотками основного электродвигателя, а ходовой винт выполнен подпружиненным. При этом дополнительный электродвигатель кинематически связан с основным элект родвигателем. В качестве дополнительного электродвигателя одного из скважинных штанговых насосов использован основной электродвигатель другого скважинного штангового насоса. На фиг. 1 схематично представлено устройство для привода скважинных штанговых насосов, общий вид; на фиг. 2 - схема соединения электрических обмоток его асинхронных короткозамкнутых электродвигателей; на фиг. 3 - устройство для привода группы скважинных штанговых насосов, общий вид; на фиг. 4 - схема соединения электрических обмоток его асинхронных короткозамкнутых электродвигателей. Устройство для привода скважинных насосов состоит из ходового винта 1, связанного со штоком 2 насоса и взаимодействующего с гайкой 3 маховика 4, и асинхронного короткозамкнутого электродвигателя 5 со статорными обмотками 6,связанного с передачей 7, взаимодействующей с маховиком 4.
Устройство снабжено дополнительным асинхронным короткозамкнутым двигателем 8, статорные обмотки 9 которого включены последовательно со статорными обмотками 6 основного электродвигателя 5. Ходовой винт 1 подпружинен и снабжен верхним 10 и нижним 11 упорами, соприкасающимися соответственно с верхней 12 и нижней 13 пружинами. Шток 11 связан с колонной насосных штанг (не показана). Все устройство размещено на выщке 14. Дополнительный электродвигатель 8 кинематически связан с основным электродвигателем 5 посредством элемента 15 передачи 7.
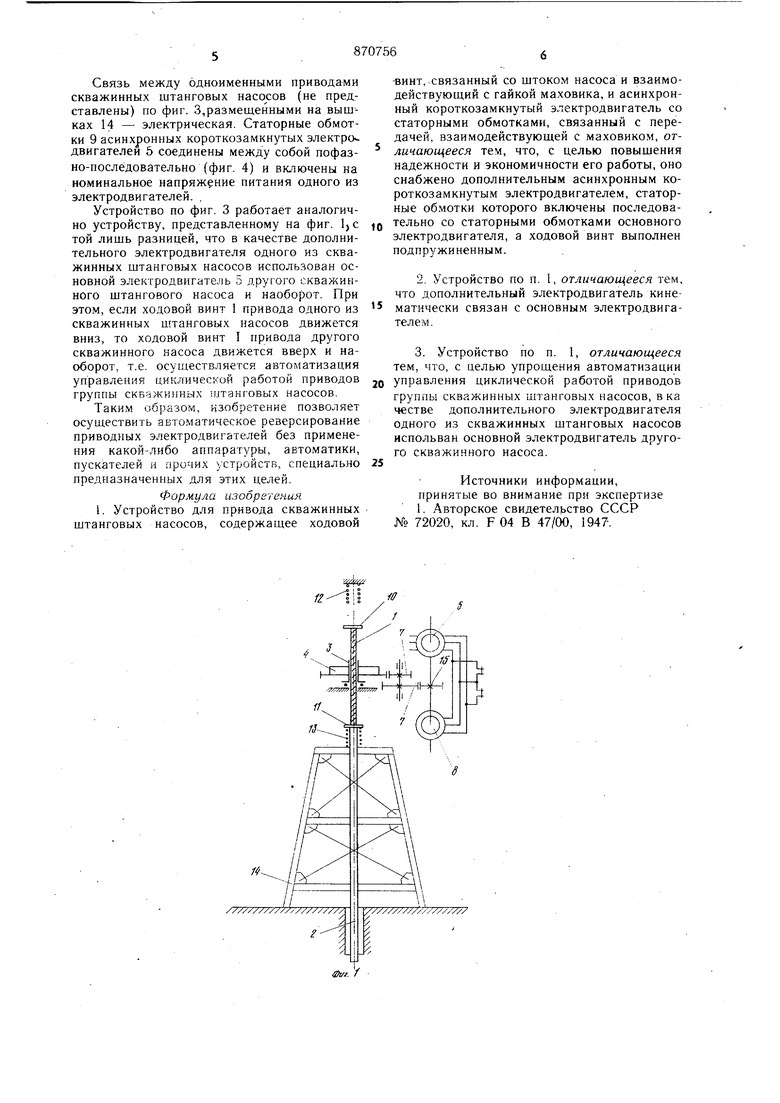
Обмотки 6 и 9 асинхронных короткозамкнутых электродвигателей 5 и 8 соединены пофазно-последовательно (фиг. 2), таким образом, что направление вращения электродвигателя 5 противоположно направлению вращения электродвигателя 8 и включены на но.минальное напряжение питания одного электродвигателя. Электродвигатель 5 осуществляющий подъем штока 2, имеет мощность большую,. чем у электродвигателя 5 и меньшую частоту вращения.
В варианте устройства для привода групП1)1 скважинных штанговых насосов по фиг. 3 в качестве дополнительного электродвигателя одного из скважинных штанговых насосов (на чертеже не показан) использован основной электродвигатель 5 другого скважинпого штангового насоса (на чертеже не показан).
Устройство -для привода скважинных штанговых насосов работает следующим образом.
При включении напряжения на вход каскада асинхронных электродвигателей 5 и 8, напряжения между ними распределяются пропорционально их полным внутренним сопротивлениям. Так, как электродвигатель 5 имеет большую мощность и меньшую частоту вращения относительно электродвигателя 8, то полное внутреннее сопротивление двигателя 5 больше, чем у двигателя 8. Поэтому напряжение на двигателе 5 в момент запуска больше напряжения на двигателе 8. Совокупность указанных факторов приводит к тому, что суммарный момент на общем валу двигателей (не обозначен) приводит к запуску двигателя 5 и вращению через передачу 7 маховика 4, связанного с гайкой 3, которая.действуя на винт 1 (выполненный не самотормозящимся), начинает осуществлять подъем штока 2 насоса. По мере разгона электродвигателя 5, увеличивается напряжение на нем и развиваемый им вращающий момент, а направление на вращающемся в противоположную сторону дополнительном электродвигателе 8 уменьшается до величины опыта короткого замыкания.Поэтому тормозящий момент дополнительного электродвигателя 8 является величиной второго и третьего порядка малости по сравнению с вращающим моментом электродвигателя 5.
После подъема ходового винта 1, а следовательно, и щтока 2 насоса, на заданную величину, верхний упор 10 приходит в соприкосновение с верхней пружиной 12 и сжимает ее, что, в свою очередь, приводит
к ув.еличению момента сопротивления на валу электродвигателя 5. Электродвигатель 5 тормозится, скольжение его увеличивается, а полное внутреннее сопротивление уменьшается, что снижает напряжение на нем и,
0 следовательно, снижает вращающий момент, развиваемый этим двигателем. При увеличении момента сопротивления со стороны винта 1 будет увеличиваться и момент сопротивления вращению электродвигателей 5 и 8, а это, в конечном счете, приведет
к их остановке. В данном случае сумма моментсв от силы, действующей вдоль оси ходового винта 1, электродвигателя 5 и дополнительного электродвигателя 8 имеет знак, согласный с мо.ментом дополнитель. кого электродвигателя 8 и величину, достаточную для запуска двигателя 8. Под действием силы тяжести и силы упругости пружины 12, ходовой винт 1 начинает перемещаться вниз, вращая через гайку 3 передачу 7, общий вал электродвигателей (не
5 обозначен) в сторону направления вращаю лего момента дополнительного электродвигателя 8. Это вызывает уменьшение ско.льжения двигателя 8 (и увеличение скольжения электродвигателя 5) Т Полное внутд реннее сопротивление двигателя 8 увеличивается, а двигателя 5 - уменьшается. Так как обмотки 6 и 9 двигателей 5 и 8 обтекаются одним и тем же током, то следовательно, падение напряжения на двигателе 8 увеличивается, а на двигателе 5
5 уменьшается.
Увеличение напряжения на дополнительном электродвигателе 8 способствует возрастанию (по квадратичной зависимости) его вращающего момента, который, суммиру ясь с моментом от силы тяжести вдоль оси хо дового винта 1, вызывает его ускоренное перемещение вниз до тех пор, пока нижний упор 11 не начнет сжимать нижнюю пружину 13. При сжатии пружины 13 увеличи5 Бается момент сопротивления вращению дополнительного электродвигателя 8 до полной его остановки. После этого процесс повторяется.
При необходимости более быстрого начального запуска электродвигателя 5 или в
случае использования .двигателей 5 и 8 одинаковой мощности и скопости вращения, первоначальный запуск привода осуществляется с кратковременным шунтированием обмоток дополнительного электродвигателя 8,
J нормальнозамкнутыми контактами KI и К2, которые размыкаются через установленный промежуток времени после запуска электродвигателя 5 каким-либо из известных способов.
Связь между одноименными приводами скважинных штанговых насосов (не представлены) по фиг. 3,размещенными на вышках 14 - электрическая. Статорные обмотки 9 асинхронных короткозамкнутых электродвигателей 5 соединены между собой пофазно-послёдовательно (фиг. 4) и включены на номинальное напряжение питания одного из электродвигателей. ,
Устройство по фиг. 3 работает аналогично устройству, представленному на фиг. 1) с той лишь разницей, что в качестве дополнительного электродвигателя одного из скважинных штанговых насосов использован основной электродвигатель 5 другого скважинного штангового насоса и наоборот. При этом, если ходовой винт 1 привода одного из скважинных штанговых насосов движется вниз, то ходовой винт I привода другого скважинного насоса движется вверх и наоборот, т.е. осуществляется автоматизация управления циклической работой приводов группы скважкнных ютанговых насосов.
Таким образом, изобретение позволяет осуществить автоматическое реверсирование приводных электродвигателей без применения какой-либо аппаратуры, автоматики, пускателей и прочих устройств, специально предназначенных для этих целей. Формула изобретения
-винт, связанный со штоком насоса и взаимодействующий с гайкой маховика,и асинхронный короткозамкнутый электродвигатель со статорными обмотками, связанный с передачей, взаимодействующей с маховиком, отличающееся тем, что, с целью повышения надежности и экономичности его работы, оно снабжено дополнительным асинхронным короткозамкнутым электродвигателем, статорные обмотки которого включены последовательно со статорными обмотками основного электродвигателя, а ходовой винт выполнен подпружиненным.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР Ко 72020, кл. F 04 В 47/00, 1947.
Г
6 9
ff 3
Фаг.
