1
Изобретение относится к приводам главного движения строгальных или долбежных станков, в особенности к приводам для возвратно-поступательного движения и устройств для амортизации ударов или для регенерации энергии торможения,и может быть использовано в поперечно-строгальных станках и продольно-строгальных станках.
Известны механизмы привода главного прямолинейного движения поперечно-строгального станка, содержащего ползун, связанный гайкой с ходовым винтом и через передачу и коробку скоростей с асинхронным приводным электродвигателем l J.
Недостатками таких механизмов являются низкая производительность, сложность привода и низкая надежность.
Целью изобретения является повышение производительности и надежности работы.
Эта цель достигается тем, что предложенный механизм снабжен дополнительным асинхронным электродвигателем, связанным через передачу с ;выходным валом коробки скоростей, статорная обмотка которого включена пофазно-последовательно со статорной обмоткой основного асинхронного приводного электродвигателя и обе включены на напряжение питания, равное номинальному напряжению одного электродвигателя, а на концах ходо10вого винта размещены пружины.
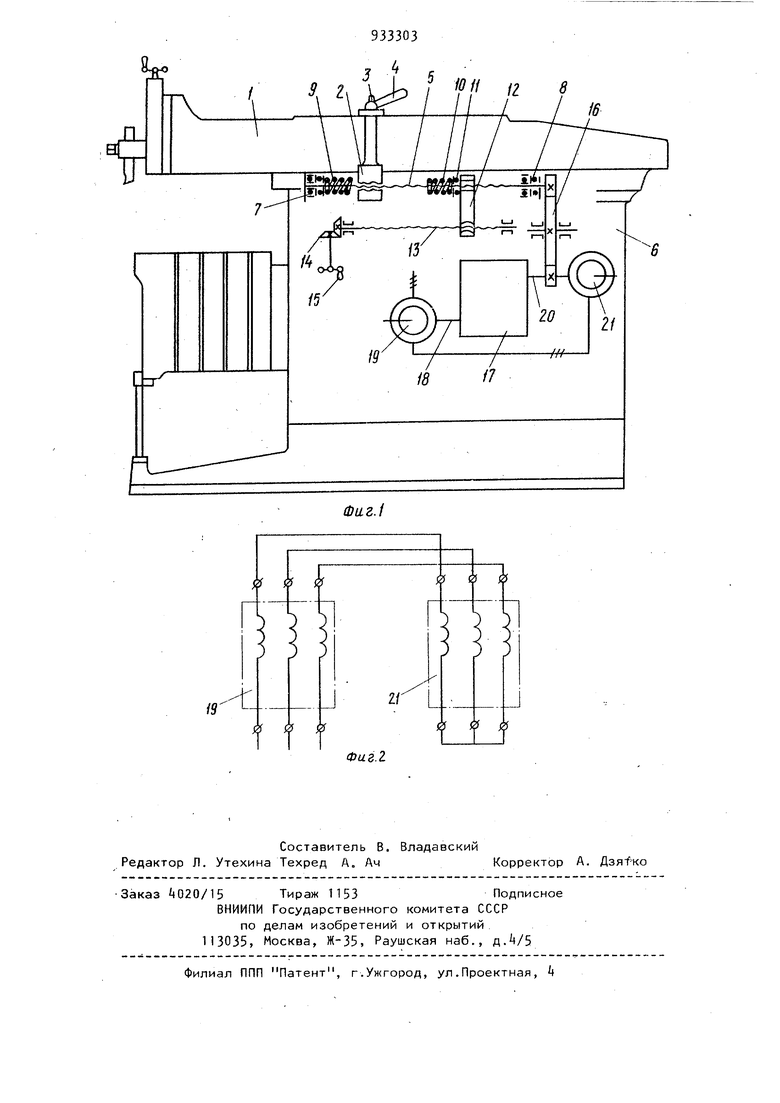
На фиг.1 представлена принципиальная электрокинематическая схема предлагаемого механизма; на фиг. 2 принципиальная электрическая схема
15 соединения статорных обмоток электродвигателей предлагаемого механизма.
Предлагаемый механизм содержит ползун 1, соединенный с ходовой гайкой 2 при помощи винта 3 и рукоят20ки А, которая имеет возможность перемещаться по ходовому винту 5. Винт 5 врадается на неподвижно, укрепленных в корпусе 6 станка подшипниках 7 I и 8, причем у подшипникового узла подшипника 7 размещена пружина 9 а пружина 10 вместе с упорным подшипником 11 размещена на упоре 12, закрепленном на корпусе станка. Мее то его закрепления может изменяться при помощи винта 13, .вращаемого через передаму I рукояткой 15.Вращение ходовому винту 5 передается через передачу 16 от коробки скорое тей 17, с входным валом 18 которой жестко соединен вал асинхронного ко роткозамкнутого электродвигателя 19 а с выходным валом 20 жестко соединен вал асинхронного короткозамкн того электродвигателя 21. Направлени вращения электродвигателей 19 и 21 выбраны таким образом, что при вращении вала электродвигателя 21 гайка 2 перемещается вправо, а при вра щении вала электродвигателя 19 гайка 2 перемещается влево. При этом мощности электродвигателей 9 и 21 могут быть одинаковы или мощность двигателя 21 может быть меньше мощности электродвигателя 19. Скорости их вращения также могут быть оди наковы, но скорость вращения электродвигателя 21 может быть больше скорости вращения электродвигателя 19. Предлагаемый механизм работает следующим образом. При включении напряжения на вход каскада асинхронных электродвигателей напряжения между ними распределяются пропорционально их полным внутренним сопротивлениям. Так как электродвигатель 21 имеет меньшую мощность, то полное внутреннее сопротивление его выше, чем у электро двигателя 19. Тогда на обмотках эле тродвигателя 21 окажется большее напряжение и он начнет разгоняться, так как совокупность указанных факторов приводит к тому, что суммарны момент на общем приводном винте при ведет к запуску электродвигателя 21 При этом электродвигатель 21 через передачу 16 будет вращать ходовой винт 5, вращение которЬго приве дет к перемещению по нему гайки 2 вправо, а вместе с ней и ползуна 1. Это перемещение происходит до тех по пока гайка 2 не начнет сжимать пруж ну 10, размещенную на упоре 12. При этом электродвигатель IJ через коро ку скоростей вращается в обратную сторону от направления вращения, соотвеТлСтвующего его рабочему ходу. Так как момент сопротивления от сжимаемой пружины 10 постоянно увеличивается, то электродвигатель 21 начинает тормозиться, скольжение его увеличивается, а полное внутреннее сопротивление уменьшается. Что снижает напряжение на нем и, следовательно, снижается развиваемый им вращающий момент. При этом обмотки электродвигателя 19 имеют полное-внутреннее сопротивление, большее, чем у электродвигателя 21. Таккак обмотки электродвигателей 19 и 21 обтекаются одним и тем же током, то, сдедовательно, падение напряжения на обMOTKax электродвигателя 19 увеличивается, а на электродвигателе 21 уменьшается. Увеличение напряжения на электродвигателе 19 способствует возрастанию (по квадратичной зависимости) его вращающего момента, который, суммируясь с моментом от сил упругости сжатой пружины 10, действующей на валы электродвигателей 19 и 21, имеет знак, согласный с моментом электродвигателя 19, и величину, достаточную для запуска электродвигателя 19. При этом ходовой винт от электродвигателя 19 через коробку скоростей 17 и передачу- 16 начинает вращаться в другую сторону и заставляет перемещаться гайку 2 и связанный с нею ползун 1 вправо, осуществляя рабочий ход по строганию материала. В связи с тем, что передача движения от электродвигателя 19 ходовому винту 5 осуществляется через коробку скоростей 17, величина скорое ти резания, определяемая свойствами инструмента и обрабатываемого материала, будет меньше, чем скорость отвода ползуна назад. Рабочий ход длится до тех пор, пока гайка 2, перемещаясь по винту 5, не начнет сжимать пружину 9. При этом возрастают суммарный момент, приведенный к валу электродвигателя 19 и вращающий момент электродвигателя 19. Это вызывает торможение электродвигателя 19 и возрастание его скольжения. При этом полное внутреннее сопротивление его начнет уменьшаться, что вызовет снижение напряжения на нем и, следовательно, снижение развиваемого им вращающего момента. Теперь обмотки электродвигателя 21 имеют полное внутреннее сопротивление,большее, чем у электродвигателя 19- Так как обмотки электродвигателей 19 и 21 обтекаются одним и тем же током, то следовательно, падение напряжения на обмотках электродвигателя 21 увеличивается, а на обмотках электродвигателя 19 уменьшается. Увеличение напряжения на электродвигателе 21 способствует возрастанию ( по квадратичной зависимости его вращающего момента, который, суммируясь с моментом.от сил упругости сжатой пру жины 9 действующей на валы электродвигателей 19 и 21, имеет знак согласный с моментом электродвигателя 21, и величину, достаточную для запуска электродвигателя 21.
Запустившись, электродвигатель 21 отодвинет ползун 1 Скак было показано выше) со скоростью, намного большей, чем скорость резания, так :как передача движения к винту 5 от Электродвигателя 21 осуществляется почти напрямую. Далее процессы запуска повторяются аналогично описанным выше, происходит строгание материала. Величина хода ползуна 1 регулируется местом уста новки упора 12 при помощи рукоятки 15 через передачу 1 и винт 13. Величина вылета ползуна 1 регулируется путем изменения места соединения с ним гайки 2 при помощи винта 3 и рукоятки 4. При ослаблении винта 3 ползун 1 свободно может быть перемещен относительно корпуса 6 вручную.
Таким образом, в предлагаемом механизме привода главного прямолинейного движения поп ечно-строгального станка происходит автоматический процесс возвратного движения ползуна без применения режима противовключения приводного электродвигателя, без применения реверсивных пускателей, кулисного механизма и различных устройств автоматики. При этом производительность станка увеличивается, так как скорость отвода ползуна назад Намного больше скорости рабочего хода. При резании скорость движения резца постоянна, а не переменна как при использовании кулисного механизма, и надежность устройства повышена.
Формула изобретения
1 . Механизм привода главного прямолинейного движения поперечно-стро гального станка, содержащий ползун, связанный гайкой с ходовым винтом и через передачу и коробку скоростей с асинхронным приводным электродвигателем, отличающийся ,тем, что, с целью повышения производительности и надежности работы, механизм снабжен дополнительным асинxpoHHbiM электродвигателем, связанным через передачу с выходным валом коробки скоростей, причем статорная обмотка которого включена пофазно последовательно со статорной обмотко основного асинхронного приводного электродвигателя и обе включены на напряжение питания, равное номинальному напряжению одного электродвигателя .
2. Механизм привода по п.1, о т л и чающийся тем, что, с целью снижения потерь при реверсировании движения ползуна, на концах ходового винта установлены дополнительные пружины.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР W 69125, кл. В 23 D 7/10, 197 (прототип).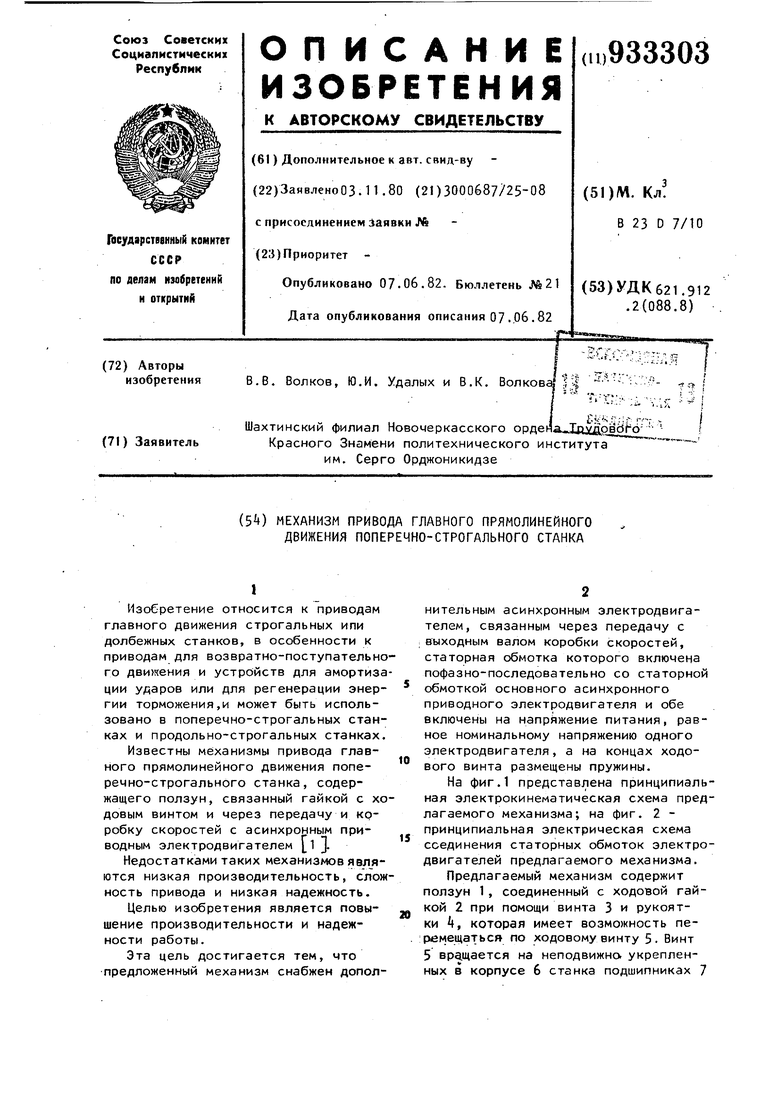

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для привода скважинных штанговых насосов | 1980 |
|
SU870756A1 |
| АВТОМАТИЧЕСКИЙ СТАНОК ТИПА ПАНТОГРАФА ДЛЯ ОБРАБОТКИ ФАСОННЫХ ПОВЕРХНОСТЕЙ | 1934 |
|
SU40129A1 |
| Устройство для управления сверлильным станком | 1980 |
|
SU856680A1 |
| Привод ракеля трафаретной печатной машины | 1980 |
|
SU867678A1 |
| Бурильная установка | 1977 |
|
SU765501A1 |
| Способ управления движением рабочего органа винтового молота-пресса | 1973 |
|
SU478745A1 |
| Продольно-строгально-фрезерный станок | 1991 |
|
SU1797526A3 |
| ВИНТОВОЙ ПРЕСС | 1973 |
|
SU432002A1 |
| Токарный многооперационный станок | 1985 |
|
SU1321526A1 |
| Устройство для подачи электрода-инструмента в электроэрозионных станках для прошивания глубоких отверстий | 1958 |
|
SU121016A1 |