(54) РУКА МАНИПУЛЯТОРА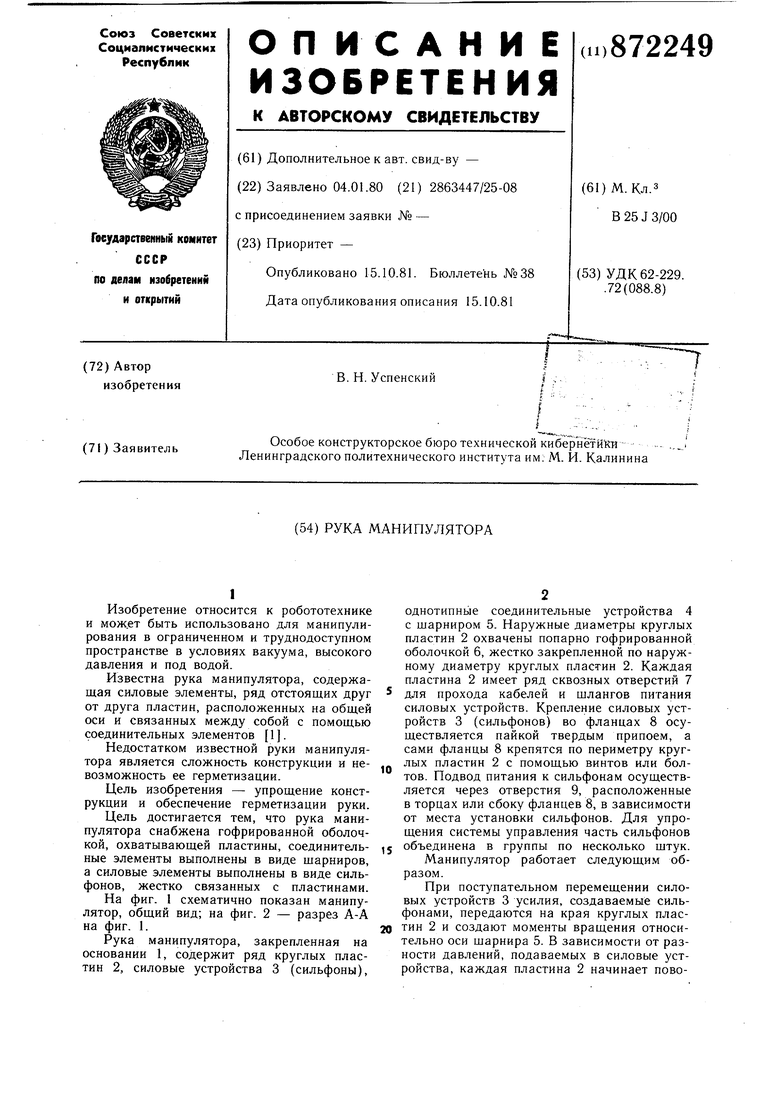
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнир манипулятора | 1979 |
|
SU946922A1 |
| Рука манипулятора | 1987 |
|
SU1414642A1 |
| Манипулятор | 1991 |
|
SU1821355A1 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| ГОФРОЧЕХОЛ ДЛЯ ЗАЩИТЫ ШАРОВОГО ШАРНИРА ОТ ПЫЛИ, ГРЯЗИ И ВЛАГИ | 2014 |
|
RU2605577C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ Абрамова В.А. | 2014 |
|
RU2568626C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА БЕСКАМЕРНОЙ ШИНЫ НА ОБОДЕ КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2428321C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ МИНИМАЛЬНЫХ ИНВАЗИВНЫХ ВМЕШАТЕЛЬСТВ | 2007 |
|
RU2412800C2 |
| МЕДИЦИНСКАЯ РОБОТИЗИРОВАННАЯ СИСТЕМА | 2007 |
|
RU2412799C2 |
| ИЗОЛИРУЮЩИЙ ДЫХАТЕЛЬНЫЙ АППАРАТ | 2004 |
|
RU2244576C1 |
1
Изобретение относится к робототехнике и мож.ет быть использовано для манипулирования в ограниченном и труднодоступном пространстве в условиях вакуума, высокого давления и под водой.
Известна рука манипулятора, содержащая силовые элементы, ряд отстоящих друг от друга пластин, расположенных на общей оси и связанных между собой с помощью соединительных элементов 1.
Недостатком известной руки манипулятора является сложность конструкции и невозможность ее герметизации.
Цель изобретения - упрощение конструкции и обеспечение герметизации руки.
Цель достигается тем, что рука манипулятора снабжена гофрированной оболочкой, охватывающей пластины, соединительные элементы выполнены в виде шарниров, а силовые элементы выполнены в виде сильфонов, жестко связанных с пластинами.
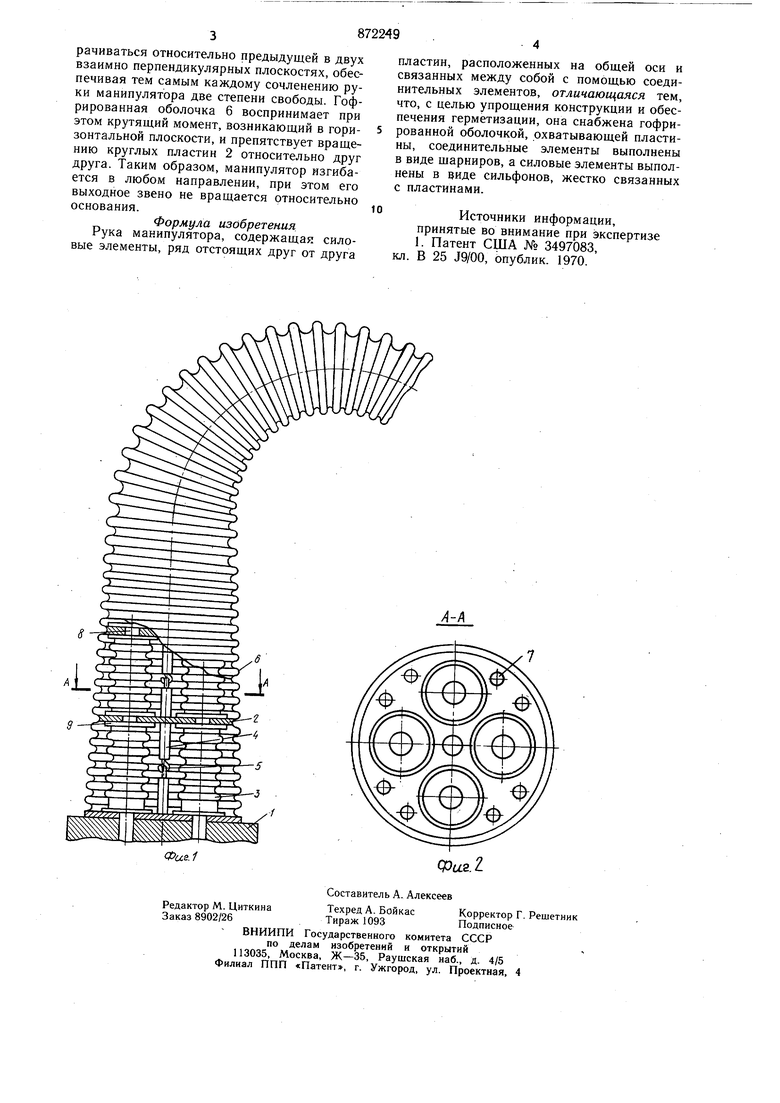
На фиг. 1 схематично показан манипулятор, общий вид; на фиг. 2 - разрез А-А на фиг. 1.
Рука манипулятора, закрепленная на основании 1, содержит ряд круглых пластин 2, силовые устройства 3 (сильфоны).
однотипные соединительные устройства 4 с шарниром 5. Наружные диаметры круглых пластин 2 охвачены попарно гофрированной оболочкой 6, жестко закрепленной по наружному диаметру круглых пластин 2. Каждая пластина 2 имеет ряд сквозных отверстий 7 для прохода кабелей и шлангов питания силовых устройств. Крепление силовых устройств 3 (сильфонов) во фланцах 8 осуществляется пайкой твердым припоем, а сами фланцы 8 крепятся по периметру круглых пластин 2 с помощью винтов или болтов. Подвод питания к сильфонам осуществляется через отверстия 9, расположенные в торцах или сбоку фланцев 8, в зависимости от места установки сильфонов. Для упрощения системы управления часть сильфонов
,5 объединена в группы по несколько штук. Манипулятор работает следующим образом.
При поступательном перемещении силовых устройств 3 усилия, создаваемые сильфонами, передаются на края круглых пластин 2 и создают моменты вращения относительно оси шарнира 5. В зависимости от разности давлений, подаваемых в силовые устройства, каждая пластина 2 начинает пово
