(Л
1
ю
да/
Изобретение относится к машиностроению, а именно к конструкциям |1 анипуляторов.
Цель изобретения - расширение зоны обслуживания за счет увеличения вылета руки и повьппение грузо- юдъемности.
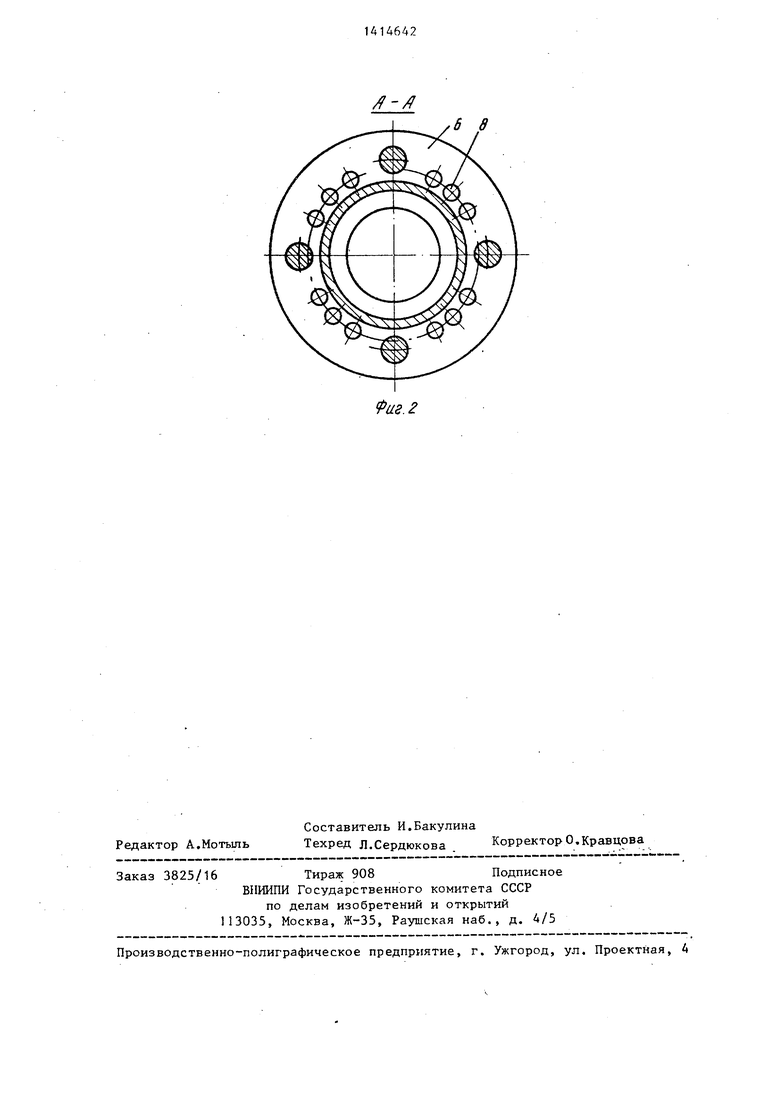
I На фиг. 1 изображена рука манипу- |пятора, общий вид в разрезej на фиг, 2 - разрез А-А на фиг. 1. i Рука манипулятора, закрепленная |на основании 1, содержит центральный гибкий стержень, выполненный из набора телескопических гибких звеньев 2. Первое гибкое звено 2 из этих телескопических звеньев жестко связано с основанием 1. На конце каждого гибкого звена 2 закреплена кольцевая пластина 3.
Кольцевые пластины 3 гибких зве ньев связаны между собой силовыми малогабаритными самотормозящими элементами 4. Соединение силовых злемен- тов 4 с кольцевыми пластинами 3 вы- полнено в виде шаровых опор 5 и 6. Наружные диаметры кольцевых пластин 3 охвачены попарно гофрированной оболочкой 7, жестко закрепленной по наружному диаметру кольцевых пластин 3, Каждая кольцевая пластина 3 имеет ряд сквозных отверстий 8 для прохода кабелей, питающих силовые элементы. Рука манипулятора снабжена охватом 9.
Рука манипулятора работает следующим образом.
При поступательном перемещении силовых элементов 4 усилия, создаваемые ими, передаются на кольцевые г пластины 3, закрепленные соответственно на гибких звеньях 2. В зависимости от комбинаций включений силовых элементов каждая кольцевая пластина 3, закрепленная на звене 2, может перемещаться поступательно относительно смежного звена 2, а остальные звенья 2 изгибаются. Гофрированная оболочка 7 воспринимает крутящий момент, возникающий в вертикальной плоскости, и препятствует враще нию кольцевых пластин 3.
Таким образом, предлагаемая рука манипулятора изгибается в любом направлении и изменяет свою длину, при этом ее выходное звено - схват 9 не вра1дается относительно основания 1.
Формула изобретения
Рука манипулятора, содержащая центральньй гибкий стержень, один конец которого Зс1креплен на основании, а на другом его конце закреплен схват, кольцевые пластины, расположенные на стержне и соединенные между собой силовыми элементами, и гофрированную оболочку, о т л и ч а ю- щ а я с я .тем, что, с целью расширения зоны обслуживания за счет увеличения вылета руки и повьшения грузо- подъемности, центральный гибкий .
стержень выполнен в виде телескопических гибких звеньев, на концах которых закреплены кольцевые пластины, причем соединение силовых элементов с кольцевыми пластинами выполнено в виде шаровых опор.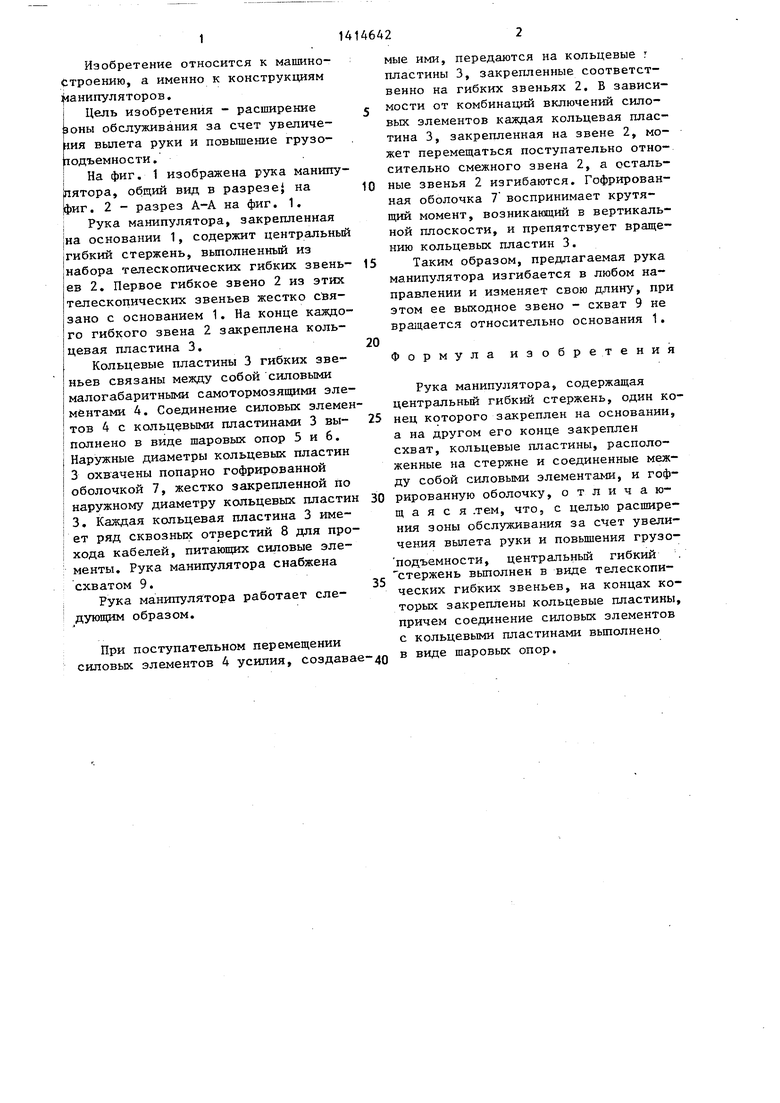
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1994 |
|
RU2073602C1 |
| ДВУРУКИЙ МАНИПУЛЯТОР | 1994 |
|
RU2069146C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ЛЕГЧЕ ВОЗДУХА (ВАРИАНТЫ) | 2006 |
|
RU2318697C2 |
| МАНИПУЛЯТОР | 1991 |
|
RU2022784C1 |
| Манипулятор | 1991 |
|
SU1821355A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Манипулятор | 1991 |
|
SU1757876A1 |
Изобретение относится к машиностроению, а именно к конструкциям манипуляторов. Целью изобретения является расширение зоны обслуживания за счет увеличения вылета руки и по- вьшениё грузоподъемности. Рука .манипулятора имеет центральный гибкий стержень, выполненный из набора телескопических гибких звеньев 2. На конце каждого гибкого эвена 2 закреплена кольцевая пластина 3. Кольцевые пластины 3 гибких звеньев связаны между собой силовыми элементами 4 посредством шаровых опор 5 и 6. В зависимости от комбинаций включений силовых элементов каждая кольцевая пластина 3, закрепленная на звене 2, может перемещаться поступательно относительно смежного звена 2, а остальные звенья изгибаются. 2 нп.
6 8
us.2
| Механическая рука манипулятора | 1974 |
|
SU837845A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
