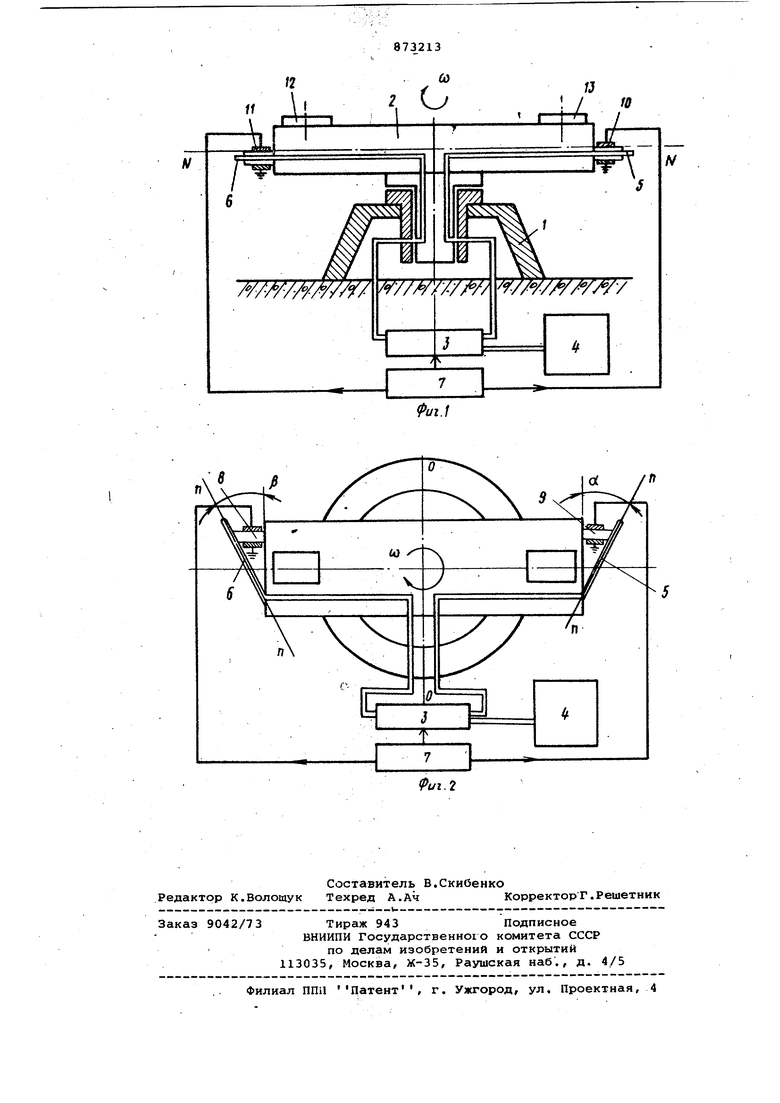
(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ Изобретение относится у регуляторам скорости и может быть использова но в измерительной технике для испытания средстй измерения параметров движения. Известно устройство для воспроизведения параметров движения, содержащее станину, размещенный на ней ротор, установленную на нем платформу,. а также узел для измерения ориентации платформы, выполненной в виде источника постоянного тока с подключенным к нему регулятором величины и полярности отклонения 1. Однако данное устройство имеет низ кую точность. Наиболее близким по технической сущности к предлагаемому является устройство для регулирования скороети вращения, содержащее ротор, выпол ненный в виде прямоугольной пластины на концах которой установлены пьезоэлементы, связанные с электродами, соединенными с блоком управления, подключенными к приводу 2, Недостатком известного устройства является низкая точность, связанная с тем, что пьезоэлементы обеспечива-ют только нерегулируемое торможение ротора и не обеспечивают его Управления. Цель изобретения - повышение точности устройства для регулирования скорости вращения. Указанная цель достигается тем, что в известном устройстве для регулирования скорости вращения привод выполнен пневмореактивным и в устройство введены источники сжатого воздуха и разгонные и тормозные сопла, установленные с возможностью контактирования с пьезоэлементами и соединен- . ные через пневмореактивный привод с источником сжатого воздуха. . На фиг.1 и 2 приведена конструктивная схема устройства для регулирования скорости вращения, изображенного в двух проекциях. Устройство содержит станину 1, установленный на ней ротор 2 в виде прямоугольной пластины, приводимый в движение с помощью пневмореактивного привода 3 с использованием источника 4 сжатого воздуха, разгонные 5 и тормозные сопла б, блок 7 управления, пьезоэлементы 8 и 9, электроды 10 и 11, платформы 12 и 13 для установку , на них испытуемых объектов, Пневмо- ( реактивный привод 3 для задания и .регулирования скорости вращения ротора как в режиме Разгон - торможеСтабилизация , так и в режиме скорости вращения связан с блоком 7 управления, который может включать ВоСебя импульсньпЧ измеритель скорости, задающий генератор, фазовый дискриминатор и усилитель мощности. Блок 7 управления связан с электродами 10 и 11. Принцип регулирования скорости вращения основан на изменении величицы и направления вектора тяги пневмореактивного привода 3. Устройство работает следующим образом. Ротор 2 приводится во вращение с помощью пневмореактивного привода 3 посредством подачи сжатого газа (воздуха) в сопло 5 от источника 4 сжатого воздуха. Блок 7 управления, воздействующий на пневмореактивный привод 3, устанавливает (посредством уве личения вектора тяги) заданный режим работы, например скорость вращения «J . При достижении заданной скорости UJ блок управления стабилизирует ее. Имеется грубая регулировка скорости посредством увеличения или уменьшения величины вектора пневматической тяги (увеличением или уменьшением давления воздуха в сопле 5 или 6) и точная регулировка тяги посредством изменения угла d- или fb с помощью пьезоэлементов 8 и 9. Например если скорость ротора 2 имеет величину JU , которая ниже заданной скоррсти на величину дш , то из блока 7 управления на пневмореактивный привод 3 поступает команда Увеличить тягу . Во исполнение этой команды в сопле 5 увеличивается давление воздуха, тяга при этом возрастает и скорость ротора (в направлении, показанном на фигурах стрелкой) повы шается. При приближении скорости вра щения ротора 2 к заданной (Ш ) давление в сопле 5 с помощью блока 7 уп равления стабилизируется, а для урав новешивания величины этой скорости в сопло 5 подается уравновешивающее пр тиводавление воздуха. После стабилизации скорости вращения ротора 2 посредством уравновешивания тяги сопла 5 (разгоняющего ротор 2) и тяги сопла 6 (тормозящего ротор 2) устана ливается постоянная скорость, например ий . Предположим, что Ш ниже за данного значения на некоторую (малую величину . Тогда на управляемый пь оэлемент 9 (возбуждающие электро ды 10) из блока 7 управления подается (для регулирования В малом ) электрический потенциал, вызывающий укорочение управляемого пьезоэлемента 9. Поскольку он механически связа с ротором 2 и соплом 5, происходит подтягивание сопла 5 к ротору 2, в результате чего угол тяги уменьшает(ся, а вектор тяги (эффективное значе ние) увеличивается, а следовательно, скорость Е)отора 2 повышается. При достижении скорости вращения ротора 2 величины заданного значения (СХ)р UJ ) скорость его стабилизируется. При превышении заданной скорости вращения ротора 2 (ОУр аи ) подается (для регулирования В малом ) из блока 7 управления управляющий сигнал на управляемый пьезоэлемент 8, который укорачивает его, а следовательно, уменьшает угол р , угол тормозящей тяги сопла 6. Эффективное значение тяги вектора торможения увеличивается и соответственно скорость вращения ротора 2 уменьшается. При достижении скорости вращения ротора 2 значения, равного заданному, фиксируется управляющий потенциал, подавае- . мый из блока 7 управления на пьезоэлемент 8, Описанным образом производится управление и стабилизация скорости вращения ротора 2. I Повьииение точности регулирования скорости вращения достигается за счет регулирования вектора пневматической тяги с помощью изменения величины пневмодавления в разгонных и тормозных соплах (регулирования В большом), за счет изменения направления этого вектора с помощью пьезоэлементов (регулирования В малом .) , а также за счет применения пневмореактивного привода, так как такой тип привода полностью исключает всякую механическую связь между неподвижными и подвижными частями устройства. Формула изобретения Устройство для регулирования скорости вращения, содержащее ротор, выполненный в виде прямоугольной пластины, на концах которой установлены пьезоэлементы, связанные с электродами, соединенными с блоком управления, подключенным к приводу, отличающееся тем, что, с целью повышения точности устройства, в нем привод выполнен пневмореактивным и в устройство введены источник сжатого воздуха и разгонные и тормозные сопла, установленные с возможностью контактирования с пьезоэлементами и соединенные через пневмореактивный привод с источником сжатого воздуха. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР W 504127, кл. G 01 М 19/00, 1974. 2.Авторское свидетельство СССР 476515, кл. G 01 Р 21/00,1974 (прототип) . n L
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ | 2011 |
|
RU2468488C1 |
| Центрифуга | 1980 |
|
SU879366A1 |
| СПОСОБ РАЗРУШЕНИЯ ЛЕДЯНОГО ПОКРОВА СУДНОМ НА СЖАТОМ ПНЕВМОПОТОКЕ | 2020 |
|
RU2737558C1 |
| САМОЛЕТ | 2000 |
|
RU2167787C1 |
| Ракетная каретка с управляемым торможением | 2020 |
|
RU2739537C1 |
| Способ подготовки дистанционных боевых действий | 2023 |
|
RU2812501C1 |
| Ракетная каретка с управляемым вектором тяги | 2020 |
|
RU2739546C1 |
| СПОСОБ СПАСЕНИЯ РАКЕТ-НОСИТЕЛЕЙ МНОГОРАЗОВОГО ПРИМЕНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2202500C2 |
| ВИХРЕХОД S-14 | 2014 |
|
RU2556487C2 |
| СПОСОБ ВЗЛЕТА САМОЛЕТА | 2006 |
|
RU2325307C1 |