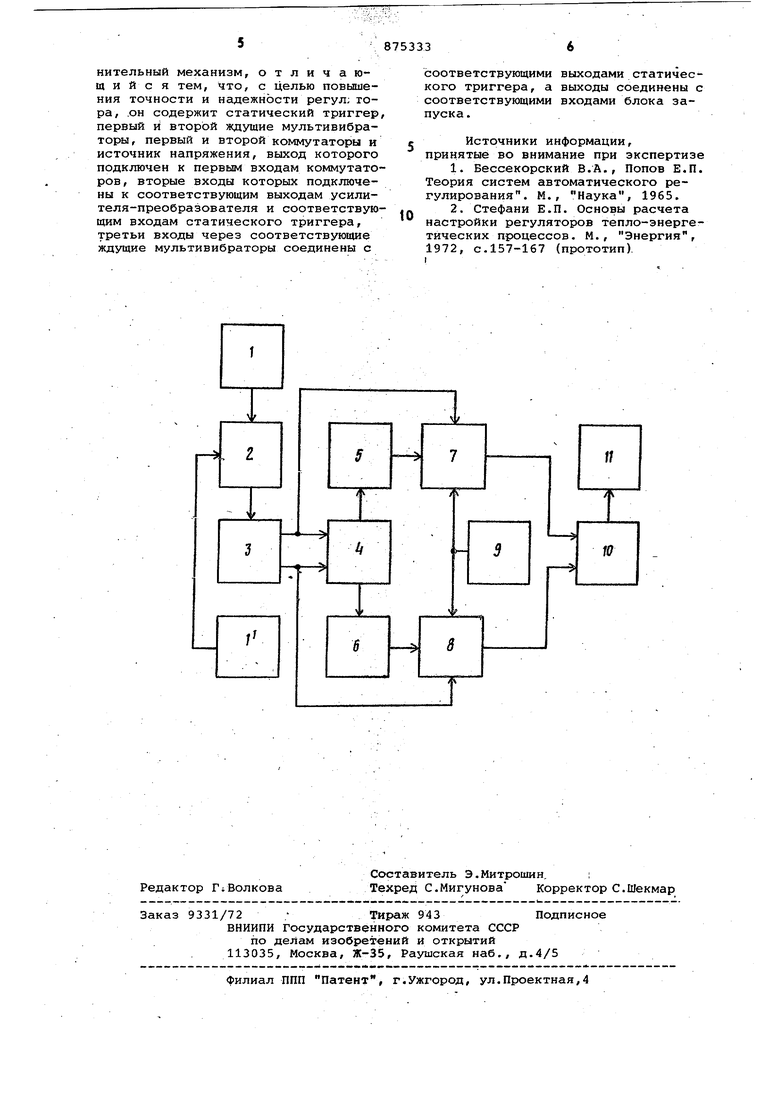
Изобретение относится к технике автоматического регулирования. Известны регуляторы, реализующие пропорционально-интегральные законы управления 1. Наиболее близким по технической сущности к предлагаемому является пропорционально-интегральный регулятор, содержащий датчик, задатчик, подключенные к соответствующим входам сумматора, выход которого соеди нен со входом усилителя-преобразова теля, а также последовательно соединенные блок запуска и исполнитель ный механизм В таких регуляторах при отклонении измеряемого параметра от заданной величины исполнительный ме,ханизм включается периодически в зависимости от установленных на управ ляющем приборе скорости связи и вре мени интегрирования и воздействует в моменты включения на регулиру«1яяй орган системы автоматического регулирования. Регулирующие органы систем регулирования могут иметь значительные люфты, устранение которых затруднительно, а во время работы оборудоаа ния, на магистралях находящихся под давлением не.редко практически невозможно . При изменении направления перемещения регулирующего органа для прохождения зоны .гаофта может потребоваться несколько вк.лючений исполнительного механизма. Это ухудшает качество регулирования, снижает точность и надежность регулятора. Цель изобретения - повышение точности и надежности регулятора. Цель достигается тем, что в пропорционально-интегральный регулятор, содержащий датчик и задатчик, подк.пюченные к соответствующим входам сумматора, выход которого соединен со входом усилителя-преобразователя, а также последовательно соединенные блок запуска, исполнительный механизм, вводятся статический; триггер, первый и второй ждущие мультивибраторы, первый и второй коммутаторы и источник напряжения, выход которого подключен -.к первым входам коммутаторов, вторые входы которых подключены к соответствукицим выходам усилителя-преобразователя и соответствующим входам статического триггера, третьи входы через соответствующие ждущие мультивибраторы соединены с соответствующими выходами статического триггера, а выходы соединены с соответствующими входами блока запуска. На чертеже представлена структур ная схема предлагаемого регулятора. Регулятор содержит датчик 1, задатчик 1, сумматор 2, усилительпреобразователь 3, статический триг гер 4, первый и второй ждущие мультивибраторы 5 и б, первый и второй коммутаторы 7 и 8, источник 9 напря жения, блок 10 запуска, исполнитель ный механизм 11. Регулятор работает следующим обра зом. В датчике 1 перемещение чувствите ного элемента, пропорциональное изме ряемому параметру, преобразуется .в электрический сигнал. Последний поступает на первый вход сумматора 2. На второй вход сумматора 2 с задатии ка г поступает сигнал, пропорционал ный заданной величине. Сигнал разбаланса отклонения измеряемой величины от заданной с выхода сумматора 2 поступает на.вход усилителя-преобразователя 3. Если величина измерявмого параметра больше заданного значения и сигнал разбаланса больше чув ствительности усилителя-преобразоват ля, управляющий сигнал будет на одно выходе, например на первом выходе усилителя-преобразователя 3. Отсюда сигнал поступает на первый вход триг гера 4 и первый вход первого коммута тора 7. Если до этого сигнал поступал со второго выхода усилителя-преобразователя 3 на второй вход трииге ра 4, то был также сигнал на втором выходе триггера 4. При поступлении сигнала на первый вход триггера 4 происходит его переключение, а сигнал появится на первом выходе триггера 4. Одновременно с переключением триггера 4 срабатывает первый ждущий мультивибратор 5 и происходит переключение первого коммутатора 7. Первый вход блока 10 запуска подключается через первый коммутатор 7 к Источнику 9 напряжения. Блок 10 запуска срабатывает, включая исполнительный механизм 11; По окончании действия ждущего мультивибратора 5 первый коммутатор 7 вновь переключаетс я, и .первый вход блока 10 запуска подключается через первый 1коммутатор 7 к первому выходу усилителя-преобразователя 3. Если в ре льтате воздействия исполнительного механизма 11 на регулирующий орган системы регулирования сигнал разбаланса не уменьшился до величины зоны нечувствительности усилителяпреобразователя 3, или если вновь появился сигнал, знак (фаза) которо такой же как у предцдущего сигнала, то снова будет сигнал на первом выходе усилителя-преобразователя 3, и триггер 4 не изменит своего состо ния, ждущие мультивибраторы 5,6 не срабатывают. Первый вход блока 10 запуска остается подключенным через первый коммутатор 7 к первому выходу усилителя-преобразователя 3, второй вход блока 10 запуска через второй коммутатор 8 ко второму выходу усилителя-преобразователя 3. Если величина измеряемого параметра стала меньше задайного значения, сигнал разбаланса на выходе сумматора 2 изменяет знак (фазу). При этом при величине сигнала разбаланса, большем зоны нечувствительности усилителяпреобразователя 3, триггер 4 переключается. Одновременно срабатывает вто-. рой ждущий мультивибратор б, через второй коммутатор 8 второй вход блока 10 запуска подключается к источнику 9 напряжения, включается исполнительный механизм 11. По окончании действия второго ждущего мультивибратора 6, второй коммутатор 8 переключается и второй вход блока 10, запуска подключается через коммутатор 8 ко второму выходу усилителя-преобразователя 3. Переключение триггера 4 и изменение направления перемещения (реверсирование) исполнительного механизма 11 происходит при изменении знака (фазы) сигнала разбаланса датчика и задатчика, т.е. статический триггер 4 запоминает направление предыдущего перемещения исполнительного механизма. Недостатки регулятора, связанные с наличием люфтов регулирующего органа, практически проявляются при реверсировании исполнителы ного механизма. Настройкой ждущих мультивибраторов 5 и 6 длительность первого включения исполнительного механизма может быть установлена такой, что зона люфта будет пройдена регулирующим органом за одно включение исполнительного механизма. А это улучшает качество регулирования, повышает точность и надежность регулятора . Таким образом, включение в регулятор новых элементов - статического триггера, первого и второго ждущих мультивибраторов, первого и второго коммутаторов, источника напряжения и соответствующее их соединение позволяет повысить точность и надежность регулятора. Формула изобретения Пропорционально-интегральный регулятор, содержащий датчик и задатчик, подключенные к соответствующим входам сумматора, выход которого соединен со входом усилителя-преобразователя, а также последовательно соединенные блок запуска и исполнительный механизм, отличающийся тем, что, с целью повышения точности и надежности регул; тора, .он содержит статический триггер, первый и второй ждущие мультивибраторы, первый и второй коммутаторы и источник напряжения, выход которого подключен к первым входам коммутаторов, вторые входы которых подключены к соответствующим выходам усилителя-преобразователя и соответствующим входам статического триггера, третьи входы через соответствующие ждущие мультивибраторы соединены с
соответструющими выходами статического триггера, а выходы соединены с соответствующими входами блока запуска .
Источники информации, принятые во внимание при экспертизе
1.Бессекорский В.А., Попов Е.П. Теория систем автоматического регулирования. М., Наука, 1965.
2.Стефани Е.П. Основы расчета
o настройки регуляторов тепло-энергетических процессов. М., Энергия, 1972, с.157-167 (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления горной машиной | 1990 |
|
SU1781426A1 |
| Система экстремального регулирования | 1982 |
|
SU1068890A1 |
| Устройство для управления температурным режимом индукционной печи | 1983 |
|
SU1095150A1 |
| Дозатор непрерывного действия | 1987 |
|
SU1506286A1 |
| Регулятор | 1979 |
|
SU800959A1 |
| Устройство для регулирования соотношения компонентов смеси | 1981 |
|
SU1067478A1 |
| Способ управления электродвигателем скребкового конвейера и электропривод для его осуществления | 1988 |
|
SU1647839A1 |
| Регулятор температуры | 1983 |
|
SU1161929A1 |
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Устройство управления охлаждением горячекатаной полосы | 1981 |
|
SU952397A1 |
