(54) ТЯГОВЫЙ ОРГАН СКРЕБКОВОГО КОНВЕЙЕРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Тяговый орган скребкового конвейера | 1983 |
|
SU1377225A1 |
| ВЫЕМОЧНО-ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ПОДЗЕМНЫХ РАБОТ | 2009 |
|
RU2417320C1 |
| Тяговый орган одноцепного скребкового конвейера | 1981 |
|
SU988684A1 |
| СТРУГОВЫЙ КОМПЛЕКС, СЕКЦИЯ КРЕПИ, УСТАНОВКА СТРУГОВАЯ, БАЗА СТРУГОВАЯ, ПРИВОД СТРУГА, ПЕРЕГРУЖАТЕЛЬ УКОРОЧЕННЫЙ, КРЕПЬ СОПРЯЖЕНИЯ, МАНИПУЛЯТОР ПЕРЕДВИЖНОЙ | 1999 |
|
RU2163970C1 |
| ВЫЕМОЧНО-ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ПОДЗЕМНЫХ РАБОТ | 2009 |
|
RU2410539C1 |
| ЗАБОЙНЫЙ СКРЕБКОВЫЙ ЗАРУБНОЙ КОНВЕЙЕР | 2014 |
|
RU2574090C1 |
| Тяговый орган скребкового конвейера | 1986 |
|
SU1419042A1 |
| Скребок скребкового конвейера для подземных работ | 1978 |
|
SU1017164A3 |
| Соединительное звено для круглозвенной цепи | 1982 |
|
SU1058844A1 |
| Тяговый орган скребкового конвейера | 1979 |
|
SU800044A1 |
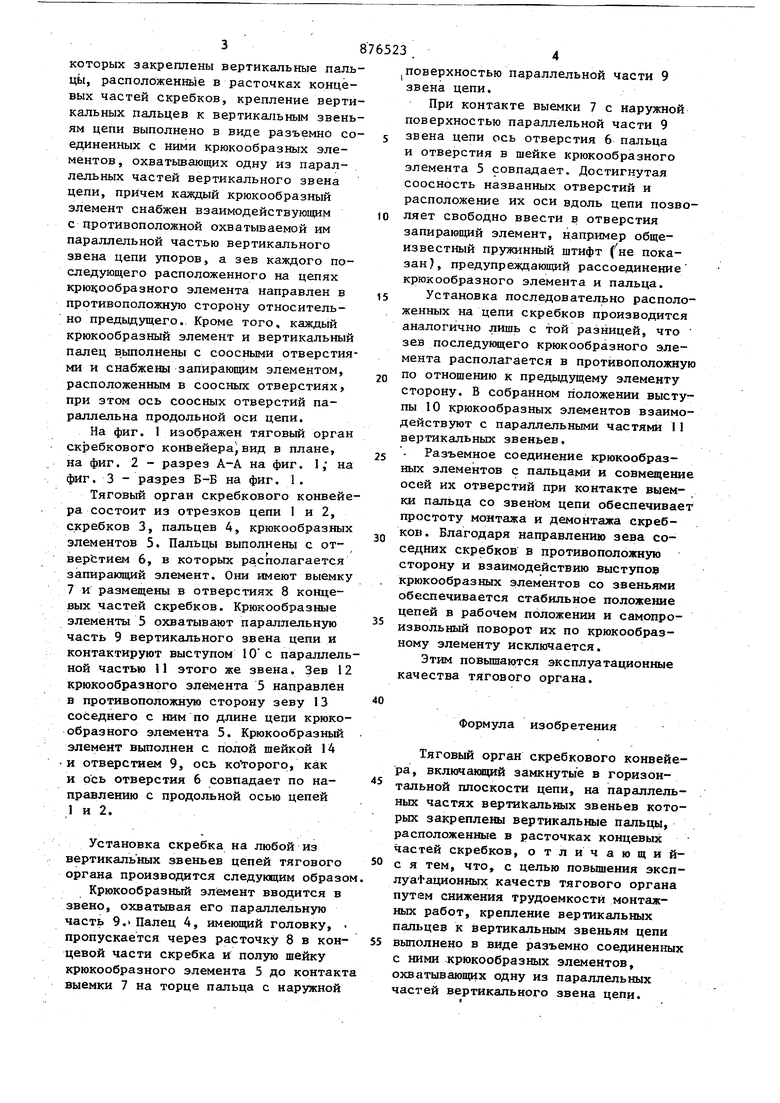
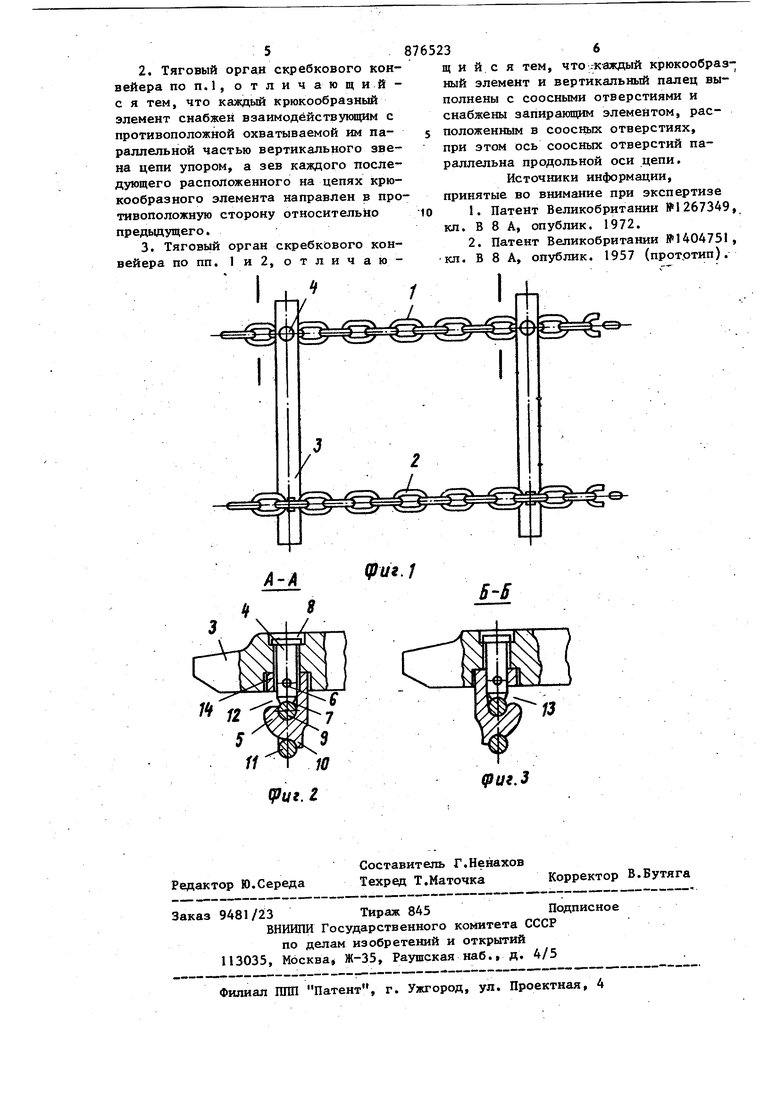
Изобретение относится к кoнвeйep ному транспорту, а именно к скребке-вым конвейерам с бесконечными тяговыми цепями замкнутыми в горизонтальной плоскости. Известны тяговые органы скребкового конвейера включаюооие одну или две бесконечные цепи, замкнутые в горизонтальной плоскости, ,у которых скребки 1шеют расточки в нонцевых частях и закреплены к цепи . вертикальными пальцами, установленными на вертикальньггс звеньях цепей, причем связь пальца с цепью вьшолнена неразъёмной 1.J. Недостатком такого тягового органа является затрудненное техническое обслуживание конвейера, поскольку при выходе из строя одного из неразъемно связанных с цепью пальцев требуется рас соединенней замена отрезка цепи, кроме того, в этом случае установка скребков возможна лишь на звеньях,, с которыми неразъемно связаны пальцы Наиболее близким к предлагаемому является тяговый орган скребкового конвейера, включающий замкнутые в горизонтальной плоскости цепи, на параллельных частях вертикальных звеньев которых закреплены вертикальные пальцы, расположенные в расточках концевых частей скребков L2 . Однако, конструктивное соединение пальца тягового органа с цепью является сложным и включает болтовые соединения, вследствие чего крепление не является быстросъемным и работы по монтажу fдемонтажу) скребков трудоемки. Цель изобретения - повьшение эксплуатационных качеств тягового органа путем снижения трудоемкости монтажных работ. Указанная цель достигается тем, что в тяговом органе скребкового конвейера, включающем замкнутые в-горизонтальной плоскости цепи, на параллельных частях вертикальных звеньев которых закреплены вертикальные паль цЫ, расположение в расточках концевых частей скребков, крепление верти кальных пальцев к вертикальным звень ям цепи выполнено в виде разъемно со единенных с ними крюкообразных элементов , охватьшающих одну из параллельных частей вертикального звена цепи, причем каждый крюкообразный элемент снабжен взаимодействующим с противоположной охватываемой им параллельной частью вертикального звена цепи упоров, а зев каждого последующего расположенного на цепях крю1$ообразного элемента направлен в противоположную сторону относительно предьщущего.. Кроме того, каждый крюкообразный элемент и вертикальный палец в шолнены с соосными отверстия ми и снабжены запирающим элементом, расположенным в соосных отверстиях, при этом ось соосных отверстий параллельна продольной оси цепи. На фиг. 1 изображен тяговый орган скребкового конвейера вид в плане, на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Тяговый орган скребкового конвейе ра состоит из отрезков цепи 1 и 2, скребков 3, пальцев 4, крюкообразных элементов 5. Пальцы выполнены с отверЬтием 6, в которых располагается запирающий элемент. Они имеют выемку 7 и размещены в отверстиях 8 концевых частей скребков. Крюкообразные элементы 5 охватывают параллельную часть 9 вертикального звена цепи и контактируют выступом 10 с параллел ной частью 11 этого же звена. Зев 1 крюкообразного элемента 5 направлен в противоположную сторону зеву 13 соседнего с ним по длине цепи крюко образного элемента 5. Крюкообразный элемент выполнен с полой шейкой 14 и отверстием 9, ось которого, как и ось отверстия 6 совпадает по направлению с продольной осью цепей 1 и 2. Установка скребка на любой из вертикальных звеньев цепей тягового органа производится следующим образ Крюкообразный элемент вводится в звено, охватывая его параллельную часть 9.Палец 4, имеющий головку, пропускается через расточку 8 в кон девой части скребка и полую щейку крюкообразного элемента 5 до контак выемки 7 на торце пальца с наружной поверхностью параллельной части 9 звена цепи. При контакте выемки 7 с наружной поверхностью параллельной части 9 звена цепи ось отверстия 6 пальца и отверстия в шейке крюкообразного элемента 5 совпадает. Достигнутая соосность названных отверстий и расположение их оси вдоль цепи позволяет свободно ввести в отверстия запирающий элемент, например общеизвестный пружинный штифт (не показан), предупреждающий рассоединение крюкообразного элемента и пальца. Установка последовательно расположенных на цепи скребков производится аналогично лишь с той разницей, что зев последующего крюкообразного элемента располагается в противоположную по отношению к предьщущему элементу сторону. В собранном положении выступы 10 крюкообразных элементов взаимодействуют с параллельными частями 11 вертикальных звеньев. Разъемное соединение крюкообразных элементов с пальцами и совмещение осей их отверстий при контакте выемки пальца со звенЬм цепи обеспечивает простоту монтажа и демонтажа скребков. Благодаря направлению зева соседних скребков в противоположную сторону и взаимодействию выступое крюкообразных элементов со звеньями обеспечивается стабильное положение цепей в рабочем положении и самопроизвольный поворот их по крюкообразному элементу исключается. Этим повьшаются эксплуатационные качества тягового органа. Формула изобретения Тяговый орган скребкового конвейера, включаннций замкнутые в горизонтальной плоскости цепи, на параллельных частях вертикальных звеньев которых закреплены вертикальные пальцы, расположенные в расточках концевых частей скребков, отличающийс я тем, что, с целью повьпиения эксплya aциoнныx качеств тягового органа путем снижения Трудоемкости монтажных работ, крепление вертикальных пальцев к вертикальным звеньям цепи вьтолнено в виде разъемно соединенных с ними крюкообразных элементов, охватывающих одну из параллельных частей вертикального звена цепи.
