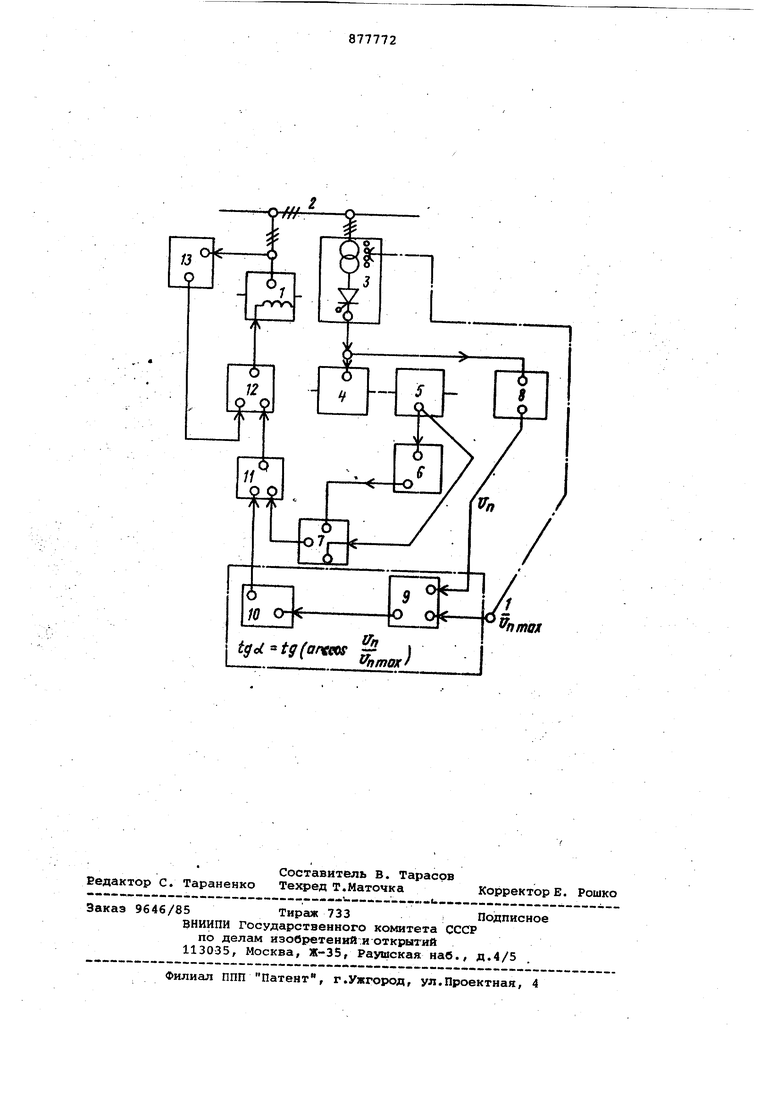
На чертеже представлена блок-схема устройства форсированного возбуждения синхронного двигателя.
Синхронный электродвигатель ( компенсатор) 1 подключен к питающей сети 2, к которой подключен также тиристорный преобразователь 3, питаю1ций прокатный электродвигатель 4, с валом которого сочленен тахогенератор 5. К выходу тахогенератора 5 подключены дифференциаторы 6, ocy-i ществляющие дифференционирование частоты вращения прокатного электродвигателя 4. Выход дифференциаторов б подключен в качестве одного из сомножителей ко входу блока 7 умножения, ко второму входу которого подключен выход тахогенератора 5. К выходу тиристорного преобразователя 3 подключен датчик 8 напряжения, выход которого подключен в качестве сомножителя к одному из входов блока 9 умножения, к другому входу которого подключены блок задания, выдающий сигнал, обратно пропорциональный максимальному напряжению и,ду тиристорного преобразователя 3 при заданном положении отпаек его силового трансформатора. Выход блока 9 умножения подсоединен ко входу нелинейного тригонометрического преобразователя 10, выходной сигнал которого пропорционален тангенсу угла оС регулирования тиристорного преобразователя 3. Выход нелинейного преобразователя 10 в качестве одного из сомножителей подключен к одному из входов блока 11 умножения, к другому входу которого подключен; выход блока 7 умножения. Выход блока 11 умножения подключен к одному из входов регулятора 12 возбуждения синхронного электродвигателя (компенсатора) 1. К другому входу регулятора 12 возбуждения подключен выход датчика 13 реактивного тока, мощнвсти или корректора.
Устройство работает следующим образом.
Момент нагрузки UM на валу прокатного электродвигателя при захвате возникает в момент времени , а ток Л1 статической нагрузки в прогсатном двигателе благодаря моменту инерции кинематической линии клети (якоря двигателя, шпинделей, валков и т.д.) и электромагнитной инерционности якорной цепи двигателя нараса-ает не мгновенно, а спустя некоторое время. По этой же причине изменение угла вылета ротора и реактивного тока (мощности)синхронного двигателя также происходит не мгновенно.
В то же время сигналы начального отрицательного ускорения и второй производной частоты вращения прокатного электродвигателя возникают без запаздывания в момент приложения нагрузки к валу этого двигателя.
они пропорциональны величине момента
нагрузки ЛМ. Причем такой сигнал значительно опережает появление приращения тока ( мощности ) синхронного двигателя. Электрический сигнал, , пропорциональный ускорению замед(лению) и второй производной частоты вращения прокатного двигателя, может быть получен, например,с помощью обычных дифференцирующих контуров, Q подключенных к зажимам связанного с прокатным электродвигателем тахогенератора.
Действительно, напряжение о на выходе тахогенератора 5 равно
СеФи,
U.
т г
где п - частота вращения тахогенератора;:Ф - поток возбуждения, Cg- постоянная ЭДС.
Напряжение U, на выходе блока 7 умножения равно
Ujj. СеФи А м 5 крд,
где К - коэффициент пропорциональности.
Реактивная мощность Гр равна
Рр РО дл,
где . активная мощность/ ot угол регулирования тиристо.ра.
Для получения величины, пропорциональной углу регулирования, косинус которого .определяет, как известно, напряжение на якоре и частоту вращения прокатного электродвигателя 4, служат блок 9 умножения и нелинейный преобразователь. 10.
На входе блока 9 умножения один из сомножителей пропорционален капряжению и.-., тиристорного преобразователя 3, . частоте вращения прокатного электродвигателя 4.
Другой сомножитель а входе блока 9 умножения постоянен по величине И равен гг J ;- , т.е. обратно пропор1 м П rttOX
ционален напряжению полностью открытого тиристорного преобразователя 3. Тогда на входе блока 9. умножения получим сигнал, равный отношению
итп
Е arccosct .
и.
тптах
Выходное напряжение блока 9 умножения поступает на вход нелинейного (тригонометрического) преобразователя 10, выходной сигнал которого равен
и
тп
tg(arccos
-) ь tgd,
и.
т.е. пропррционален тангенсу угла регулирования тиристорного преобра.зователя 3.
В, блоке 11 умножения осуществляется перемножение двух сигналов, из которых на выходе блока 7
умножения пропорционален активной мощности РО на валу прокатного элек тродвигателя, а другой на входе нелинейного преобразователя 10 пропорционален тангенсу угла регулирования cL тиристорного преобразователя 3.
Тогда на выходе блока 11 умножения получим упреждающий сигнал, пропорциональный толчкам реактивной мощности FD
P«tgot
Р
Выходное напряжение блока 11 в качестве максимального упреждающего формирующего сигнала подается на вход регулятора 12 возбуждения синхронного компенсатора .
Наряду с этим сигналом, который автоматически отключается по времени или, например, третьим по счету импульсом второй производной частоты вращения прокатного двигателя, в систему регулирования возбуждения синхронного двигателя (, компенсатора) поступают другие сигналы от датчика 13 реактивного тока (мощности, от корректора и т.д. и действуют после отключения формирующего сигнала, пропорционального толчку реакгтивной мощности Рр.
Таким образом, поданный в момент захвата максимально упрежденный во времени управляющий сигнал, пропорциональный толчкам реактивной мощности, обеспечивает необходимую начальную форсировку возбузвдения синхронного двигателя (компенсатора что повышает быстродействие регулирования.
Устройство применимо также и при быстром (ударном) сбросе нагрузки, например прв выбросе металла. При этом также, как и при захвате металла, используется первая и вторая :производные частоты вращения прокатного электродвигателя, возникающие при выходе заготовки из клети, умноженные на величину частоты вращения и на тангенс угла регулирования тиристорного преобразователя.
Формула изобретения
Устройство формирования возбуждения синхронного двигателя по авт.св. №538469, о т л и ч аю щ е е с я тем, что, с целью повышения быстродействия, в него дополнительно введены второй, и третий блоки умножения, нелинейный преобразователь., блок задания и датчик напряжения, причем выход датчика напряжения подключен к первому входу второго блока умножения, ко второму входу которого подключен блок задания, выход второго блока умножения через нелинейный преобразователь подключен к одному из входов третьего блока умножения, ко второму входу которого подключен выход первого блока умножения, а выход третьего блока умножения подключен к регулятору возбуждения синхронного двигателя.
Источники, информации, принятые во внимание при экспертизе
1. Авторское свидетельства СССР 538469, кл. Н 02 Р 9/14, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство форсирования возбуждения синхронного двигателя | 1970 |
|
SU538469A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011287C1 |
| Привод агрегата для производстваХиМичЕСКиХ МОНОНиТЕй | 1978 |
|
SU844641A1 |
| Устройство для компенсации эдс в синхронном частотно-управляемом электроприводе | 1974 |
|
SU688976A1 |
| Устройство для реверсивного бесщеточного возбуждения синхронной машины | 1986 |
|
SU1403335A2 |
| Способ защиты обмотки якоря электродвигателя постоянного тока от перегрева | 1986 |
|
SU1573499A1 |
| Устройство для динамического торможения асинхронного электродвигателя | 1978 |
|
SU764074A1 |
| Устройство для возбуждения синхронного двигателя | 1990 |
|
SU1739470A1 |
| "Устройство для моделирования системы "двигатель-насос" | 1991 |
|
SU1797095A1 |
| Автоматизированная система компенсации реактивной мощности дуговой электропечи | 1982 |
|
SU1064484A1 |