1
Изобретение относится к судостроению и касается конструирования устройств для изменения величины и направления тяги судового движителя.
Известно устройство для изменения величины и направления тяги судового движителя, содержащее корпус, одетый на приводной вал,несущий датчики угла поворота и поступательного перемещения лопастей, комли которых взаимосвязаны между собой и снабжены подшипниками, расположенными в отверстии вала, в которые вставлен с возможностью поворота рычаг из комлей лопастей, при этом центр тяжести и центр площади каждой лопасти смещены от продольной оси рычага, а на корпусе установлен регулятор положения лопастей в виде полого цилиндра с фланцем и ребрами на наружной .цилиндрической поверхности, а также фигурной кромкой для взаимодействия с ребрами комлей лопастей 1 . ;
Недостатки такого устройства заключаются в низком диапазоне регулирования величины тяги движителя и низкой надежности в работе.
Цель изобретения - расширение диапазона регулиров.ания величины тяги движителя и повышение надежности в работе.
Поставленная цель достигается тем, что устройство снабжено силовой передачей/ содержащей взаимодействующие друг с другом роторные шестерни, первая из которих выполнена с внутренними ипицами, в которых установлены ребра наружной цилиндричес10кой поверхности упомянутого регулятора с возможностью осевого перемещения, а в центре второй шестерни установлен вал с концевой шестерней датчика угла поворота лопастей, ко15торый снабжен скользящим контактом, потенциометром и магнитоэлектрическим логометром, электрически связанными между собой, а также шестерней с движком, кинематически свя20занной со второй роторной шестерней и несущей на себе скользящий контакт, при этом нижняя часть регулятора связана с датчиком поступательного перемещения лопастей.
25
Кроме того, датчик поступательного движения лопастей может быть выполнен с подпружиненным стаканом, полым цилиндром с потенциометром, стержнем и.магнитоэлектрическим логометром, 30 1при этом стакан связан со стержнем.
взаимодействующим с торцом регулятора., а последний, упомянутый потенциометр электрически связан с Магнитоэлектрическим логометром этого, датчика.
Под полым цилиндром регулятора внутри корпуса может быть образована камера, сообщенная с источником рабочего тела для упомянутой силовой передачи,
Отношение числа зубьев упомянутой шестерни датчики угла поворота лопастей к числу зубьев упомянутой концевой шестерни целесообразно выбирать равным отношению числа зубьев первой роторной шестерни к числу зубьев второй роторной шестерни.
На фиг. 1 изображен движитель; на фиг. 2 - движитель с разрезами; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - развертка наружной цилиндрической стенки регулятора с профилированным фланцем и схема изменения углов наклона лопастей; на фиг. 5 датчик измерения вращения регулятора с разрезами; на фиг. б - разрез Б-Б на фиг. 5; на фиг. 7 - разрез В-В на фиг. 5; на фиг. 8 - датчик измерения поступательно-возвратного движения регулятора с разрезами; на фиг. 9 - разрез Т-Г на фиг. 8; на фиг.10 - электрокинематическая схема датчика и указателя вращения регулятора; на фиг. 11 ;- электрокинематическая схема датчика и указателя поступательно-возвратного движения регулятора.
Движитель содержит шарнирно сочлененный с вёшом 1 рычаг, выполненный из Двух сочлененных комлей 2 и 3 лопастей 4, один из которых - комель 2 вставлен в отверстиег выполненное в торце комля 3, а лопасти 4 зафиксированы в единый жесткий узел посредством подшипников в виде шариков 5, расположенных в беговых дорожках 6 на комлях 2 и 3 на внутренней поверхности отверстия g вала 1. Центр тяжести и центр плсяцади каждой лопасти смещены от продольной оси рычага, а на корпусе 7 движителя установлен регулятор 8 положения лопастей 4, который кинематически связан с силовой передачей и датчиками угла поворота и поступательного перемещения лопастей 4. Отверстие е в торц вала. 1 и пазы 9 и 10 на комлях 2 и 3 совместно с пазом 11 на внутренней поверхности отверстия g вала 1 служат для подачи шариков 5 в беговые дорожки б на наружной поверхности комлей 2 и 3 и на внутренней поверхности отверстия g вала 1. Винт-ограничитель 12 ч.астично входит в паз ж на комле 3 и закрывает отверстие вала 1.
Регулятор 8 Положения лопастей 4 выполнен в виде полого цилиндра, ко торый имеет фланец с фигурной кром. кой-и возможностью скольжения по ней ребер 13 комлей 2 и 3, а на наружной ци; индрической поверхности около основания - ребра 14, которые расположены в шлицах центрального отверстия с роторной шестерни 15 силовой передачи, где регулятор 8 имеет возможность совершать поступательно-возвратное движение вдоль оси вала 1 в пределах смещения ребер 14 относительно стенп ки корпуса 16 и основания 17 силовой передагчи. Роторная шестерня 18 последнего, находящаяся в зацеплении с шестерней 15, жестко соединена с валом 19. Каналы 20 и 21 служат для подачи рабочего тела в камеры силовой
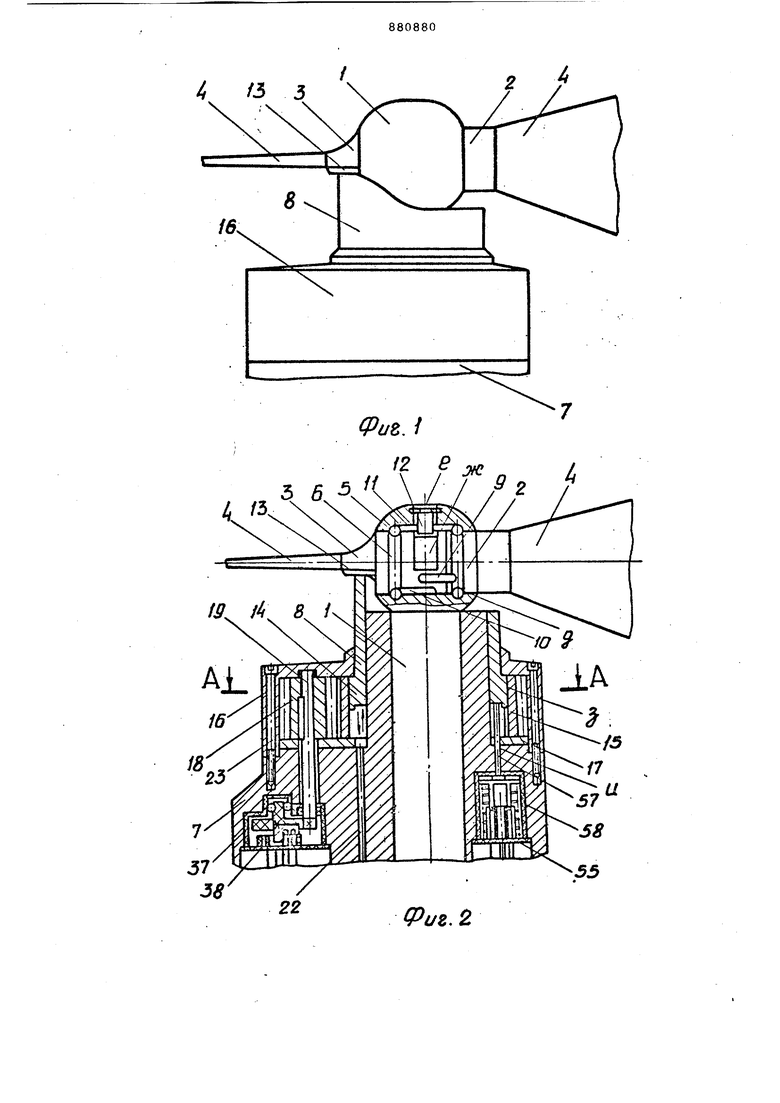
5 передачи, а канал 22 - для подачи рабочего тела в камеру, образованную основанием регулятора 8, основанием 17, цилиндрической поверхностью корпуса 7 движителя и внутренней поверх0 :ностью центрального отверстия з шестерни 15. Силовая передача закреплена на корпусе 7 движителя болтами 23. Датчик угла поворота и поступательного перемещения лопастей состоит из шестерни 24, находящейся в зацеплении с шестерней 25, которая расположена в конце вала 19, потенциометра 26, движка 27 и контактов 28-30. Движок. 27, жестко соединенный с шестерней 24, имеет три контакта, где один контакт 31, выполняющий роль оси шестерни 24, расположен в стакане неподвижного коммутирующего контакта 28 и создает скользящий контакт, второй контакт 32 с обмоткой потенциометра 26 образует скользящий контакт, а третий контакт 33 с неподвижными контактами 29 и ЗО сети сигнального устройства создают разрывные контакты. В
0 торец оси шестерни 24, установленной на шариках 34, упирается пружина 35, которая прижимает контакты 32 и 33 к контактам 29 и 30 и обмотке потенциометра 26. Подшипник 36
5 насажен на вал 19, и расположен в корпусе 37 датчика. Потенциометр 26, контакты 28-30 жестко соединены с основанием 38 датчика.Контакт 28 соединен приводсЯ139 с источником тока,конQ такты 29 и 30 соединены проводами 40 и
41с сигнальным устройством - лампами
42и 43, а потенциометр 26 соединен проводами 44 и 45 с магнитоэлектрическим логометром 46. Отношение числа зубьев шестерни 24 к
числу зубьев шестерни 25 равно отношению числа зубьев шестерни 15 к числу зубьев шестерни 18. Корпус 37, основание 38 и шестерня 24 выполнены из электроизоляционных материалов.
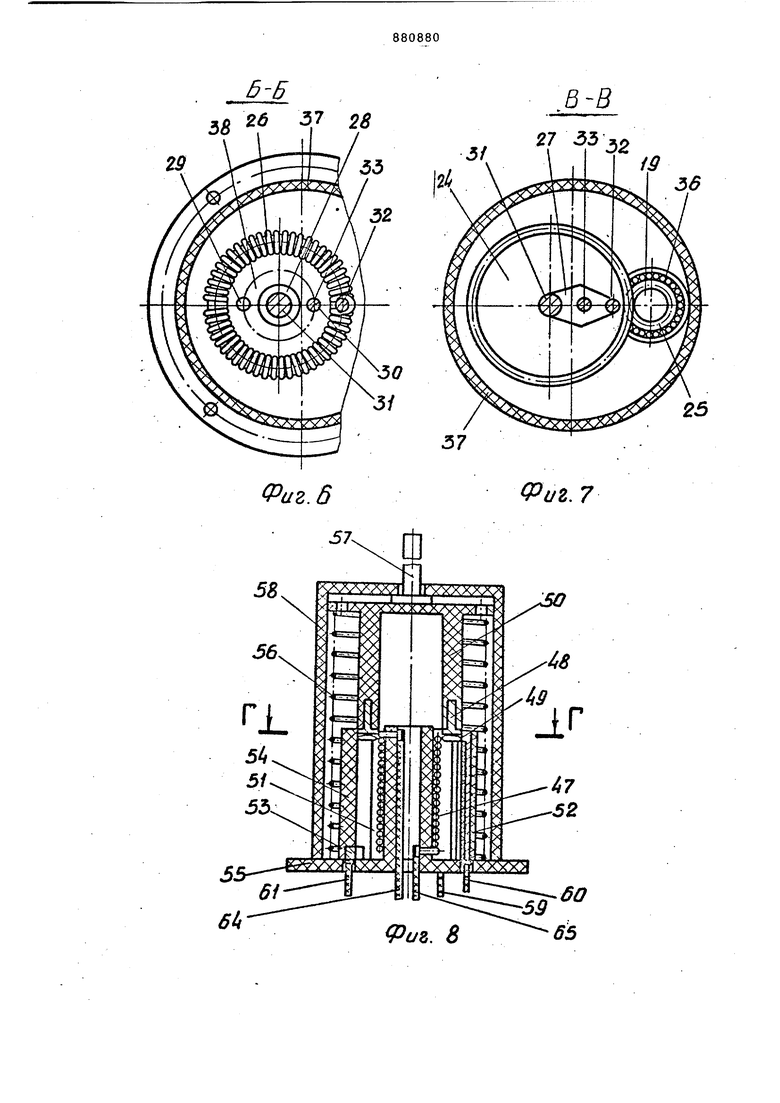
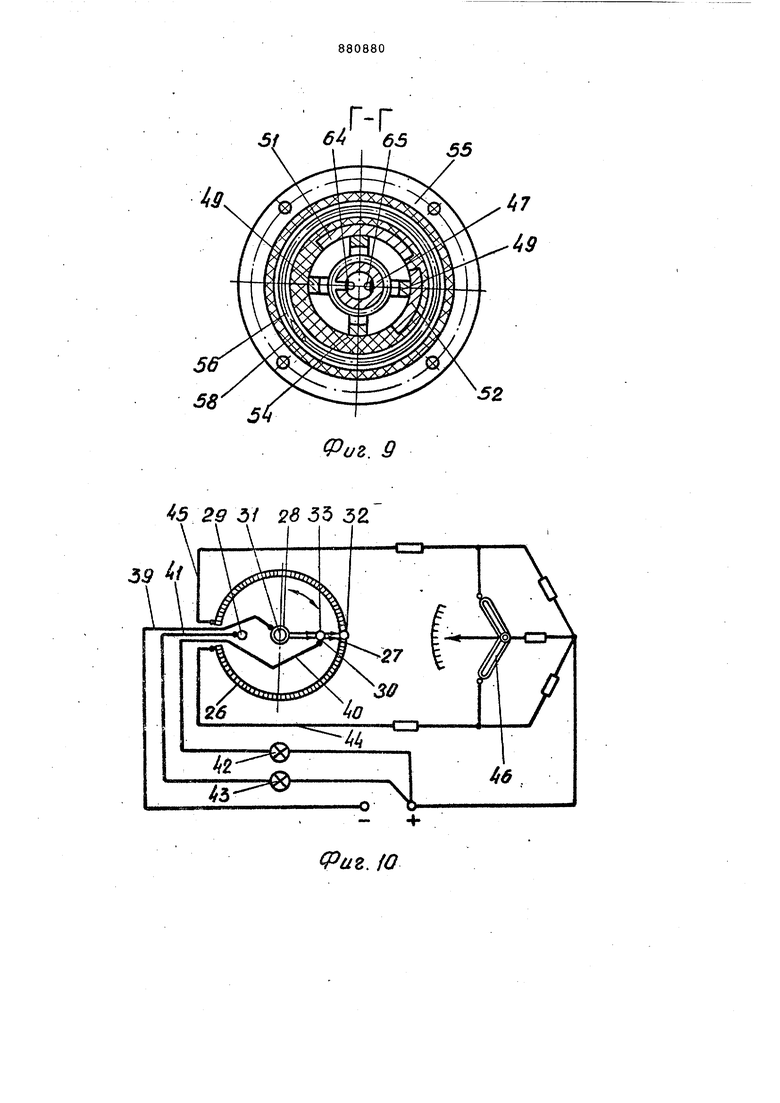
Датчик поступательного перемещения лопастей 4 состоит из потенциометра 47, контакта 48 со щетками 49, установленного на кромке стакана 50, коммутирующего контакта 51 и контактов 52 и 53 сигнального устройства, расположенных на внутренней поверхности полого цилиндра 54, где послед ний соединен с основанием 55 датчика, пружины 56, установленной между основанием стакана 50 и основанием 55 датчика, и стержня 57, проходящег через отверстие корпуса 58 и отверстие и в корпусе 7 движителя и соприкасающегося одним торцом с основание регулятора 8,а вторым торцом - с дн стакана 50. Контакт 48 с контактом 51и обмоткой потенциометра 47 образуют скользящийконтакт, а с контактом 51 и контактами 52 и 53 сигнального устройства создают разрывные контакты. Контакт 51 соединен с проводом 59 источника тока, контакты 52и 53 с проводами 60 и 61 сигнализации, имеющей лампы 62 я 63, а потенциометр 47 соединен проводами 64 и 65 с магнитоэлектрическим логометром 66. Движитель собирается из укрупненных узлов: регулятора, лопастей с валом и датчиков. Сборка регулятора начинается с установки шестерни 15 с регулятором 8 и шестерни 18 с валом 19 в корпус 16, который соединяют с основанием а последний закреплен болтами 23 на корпусе 7 движителя. Соединение лопастей 4 с валом 1 осуществляется установкой комлей 2 и 3 в отверстие g вала 1, где комль 2 частично помещен в торцовое отверсти комля 3. Заталкиваютшарики 5 в бего вые дорожки 6 через отверстие е и пазы 9-11,. закрывают винтом-ограничи телем 12 отверстие е и соединяют вал 1 с валом двигателя. Датчики угла поворота и поступательного перемещения лопастей собираются отдельно и устанавливаются в цилиндрических отверстиях Корпуса 7 движителя. Во время вращения вала 1 движителя ребра 13 комлей 2 и 3 поочередно набегают на фигурную кромку регулятора 8 и изменяют углы наклона лопас тей 4, а последние создают тягу и подъемную силу. Изменение направления тяги достигается вращением регулятора 8 вокруг вала 1, где под воздействием давления рабочей среды (воздуха, жидкости) на профилированные зубья шестерен 15 и 18, последни .вращаются совместно с регулятором 8 и валом 16. Рабочая среда подается и выходит через каналы 20 и 21. Переключая i paHOM направление подачи среды в рабочие камеры, изменяют направление вращения шестерен 15 и 18 и регулятора 8, при этом направление тяги изменяется в соответствии с углом поворота регулятора 8 вокруг вала 1. Выдвижение регулятора 8 достигается подачей рабочей среды через канал 22 в центральное отверстие з шестерни 15. В этом случае увеличивается разница между максимальными и минимальными углами наклона лопастей за один оборот вала 1, что спо,Собствует увеличению тяги с одновременным уменьшением подъемной силы. Углубление регулятора 8 внутрь корпуса 7 осуществляется выходом рабочей среды из центрального отверстия шестерни 15 через канал 22. При этом уменьшается разница между максимальными и минимальными углами наклона лопастей 4 за один оборот вала 1, что приводит к уменьшению тяги с одновременным увеличением подъемной силы. В момент максимального углубления регулятора 8 в корпус 7, ребра 13 комлей 2 и 3 не соприкасаются с фланцем регулятора 8, поэтому лопасти 4 автоматически устанавливаются на равные углы наклона за счет одностороннего смещения центра их площадей относительно оси рычага и создают только подъемную силу. Датчик поступательного перемещения лопастей необходимо отрегулировать с учетом установки стрелки логометра 46 на деление О при совпадении направления тяги с направлением движения судна, когда по катушкс1М логометра 46 должны протекать равные токи, а контакт 33 должен замыкать Контакт 30 и включать лампу 42 сигнсшьного устройства. Вращая регулятор 8 с шестернями 15 и 16, приводят во вращение шестерню 24 с движком 27, где контакт 32, скользя по обмотке потенциометра 26, изменяет величины токов в катушках логометра 46, а в последнем откло1нение стрелки указывает направление тяги. Стрелка логометра 46 устанави при измеливается на делении нении направления тяги движителя на 180. При этом контакт 32 замыкает два конца обмотки потенциометра 26 и создает равные токи в катушках логометра 46, а контакт 33 замыкает контакт 29 и включает лампу 43 сигнального устройства. Данные об наклона лопастей 4 показывает стрелка логометра 66, где стержень 57 вместе со стаканом 50 совершают синхронное движение вслед за регулятором 8, а в это время контакт 48 со щетками 49 скользят по контакту 51 и обмотке потенциометра 47 и изменяют величины токов в катушках логометра 66. На шкале делений логометра 66 нанесены деления с числами от нуля до определенной величины, которые указывают величину изменения углов наклона лопастей 4 за один оборот вала 1. При максимальном выдвижении регулятора 8 из корпуса 7 стрелка логометра 66 показывает, что углы наклона лопастей 4 изменяются на максималь-М ную величину за один оборот вала 1, создавая наибольшую тягу и наименьujyio подъемную силу при эгщанных обо ротах вала 1. В этом случае стрелка логометра66 отклоняется на максимальную величину, а контакт 48 со щетками 49 замыкает контакт 52 и включает лампу 62 сигнгшьного устройства. Во время максимального углубления регулятора 8 внутрь корпуса 7, ребра 13 комлей 2 и 3 не соприкасаются с направляющей поверх ностью фланца регулятора 8, а контакт 48 со щетками 49 замыкают контакт 53 и включают лампу 63 сигналь ного устройства, при этом стрелка логометра 66 устанавливается на делении О, указывая, что лопасти 4 при вращении вала 1 имеют равные углы наклона и создают только подъемную силу. В предлагаемом устройстве изменение направления тяги осуществляет ся в секторе 360°с возможностью уве личения и уменьшения сил тяги и подъема. Датчики измерения направления и величины тяги способствуют увеличению технико-экономической эффективности движителей за счет получения данных о направлении тяги и установ ления заданных сил тяги и подъема. Формула изобретения 1. Устройство для изменения вели чины и направления тяги судового дв .жителя, содержащее корпус, одетый на приводной вал, несущий датчики угла поворота и поступательного пер мещения лопастей, комли которых взаимосвязаны между собой и снабжен подшипниками, расположенными в отверстии вала; в которые вставлен с возможностью поворота рычаг из комлей лопастей, при этом центр тяжести и центр площади каждой лопасти смещены от продольной оси рычага, а на корпусе устано18лен регулятор положения лопастей в виде полого ци линдр с фланцем и ребрами на наруж ной цилиндрической поверхности, а также фигурной кромкой для взаимодействия с ребрами комлей лопастей, отличающееся тем, что, с целью расширения диапазона регулирования величины тяги движителя и повышения надежности в работе, оно снабжено силовой передачей,, содержащей взаимодействующие друг с другом роторные шестерни, первая из которых выполнена с внутренними шлицами, в которых установлены ребра наружной цилиндрической поверхности упомянутого регулятора с возможностью осевого перемещения,- а в центре второй шестерни установлен вал с концевой шестерней датчика угла поворота лопастей, который снабжен скользящим контактом, потенциометром и магнитоэлектрическим логометром, электрически -связанными между собой, а также шестерней с движком, кинематически связанной со второй роторной шестерней и несущей на себе скользящий контакт, при этом нижняя часть регулятора связана с датчиком поступательного перемещения лопастей. 2.Устройство по п. 1, о т л игчающееся тем, что датчик поступательного перемещения лопастей выполнен с подпружиненным стаканом, полым цилиндром с потенциометром, стержнем и магнитоэлектрическим логометром, при этом стакан связан со стержнем, взаимодействующим с торцом регулятора, а последний упомянутый потенциометр электрически связан с магнитоэлектрическим логометром этого датчика. 3.Устройство по п. 1, отличающееся тем, что под полым цилиндром регулятора внутри корпуса образована камера, сообщенная с источником рабочего тела для упомянутой силовой передачи 4.Устройство по п. 1, от л ичающееся тем, что отношение числа зубьев упомянутой шестерни датчика угла поворота лопастей к числу зубьев упомянутой концевой шестерни равно отношению числа зубьев первой роторной шестерни к числу зубьев второй роторной шестерни. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 608702, кл. В 63 Н 1/04, 1978 (прототип).
в 3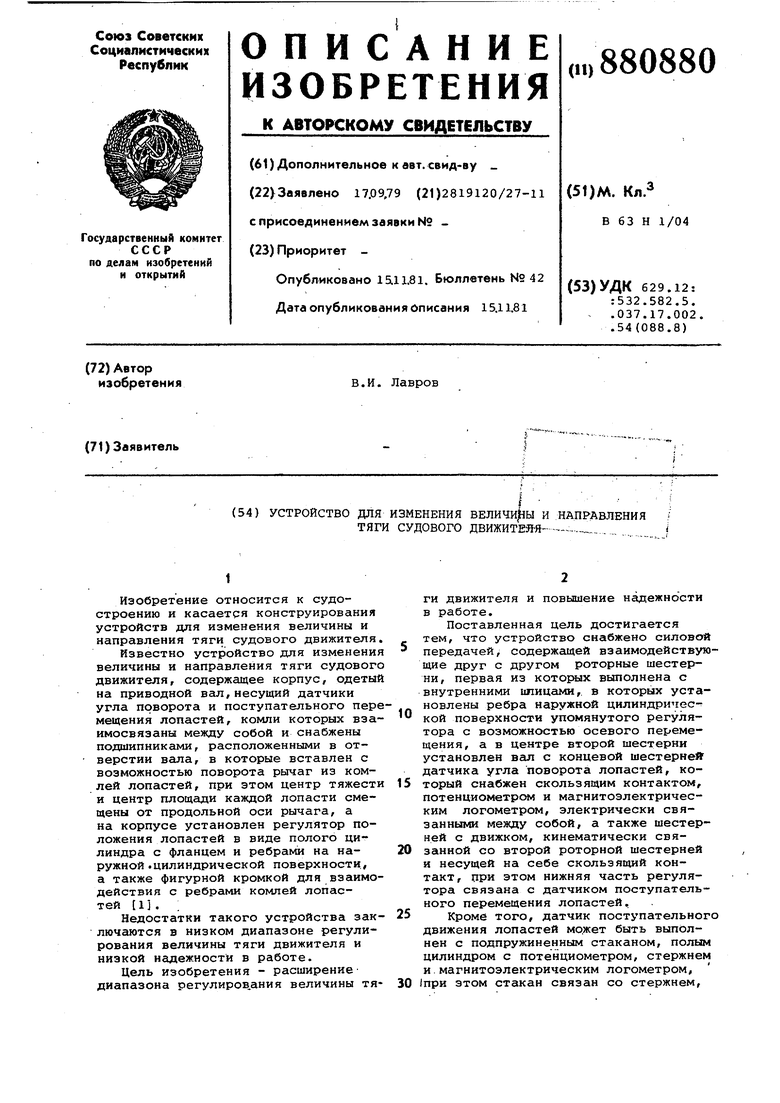





Л-J
2/
15
Фаз.
4 /3
/3
О
N Ч
V
х4
0
.
/
4
У
/
А5
/
R
8
-Л
270
WQ
Б-Б
29
аг.6
58
В-3
27 33
56
25
,7
uz, 8
иг. 9
45 29 i 28 5Ь 5г
3 f
, fO
55
52
66
uz, //
