(54) ГИДРОДИНАМИЧЕСКИЙ ПРИВОД ЭКСКАВАТОРА. С ГИБКОЙ ПОДВЕСКОЙ РАБОЧЕГО ОБОРУДОВАНИЯ
I
Изобретение относится к машиностроению, лроизводяш,ему одноковшовые экскаваторы и другие машины с гибкой подвеской рабочего оборудования, а именно к приводу этих машин.
Известен экскаватор с гибкой подвеской рабочего оборудования, включающий двигатель, фрикционное сцепление, фрикционный реверс-редуктор, тормоз поворота и механические трансмиссии к тяговому, подъемному, поворотному и ходовому механизмам .
Недостатком указанного экскаватора является то, что в процессе поворотов торможение производится за счет противовключения фрикционов реверс-редуктора. Используемый способ торможения масс за счет противовключения фрикционов энергетически не выгоден. Он приводит к бесполезной трате мощности двигателя, а. также к трехкратному завершению работы трения во фрикционах.
Наиболее близким решением к предлагаемому является гидравлический привод экскаватора, включающий реверсируемую гидродинамическую передачу, выходной вал которой кинематически связан с трансмис-.
сией поворота и хода, а ее входной вал через фрикционный реверс-редуктор связан с выходным валом основного гидротрансформатора 2.
Недостаток такого привода заключается в том, что работа буксования в тормозе
поворота остается значительной и по велнчнне такой же, как в известных приводах. Это прнводит к необходимости частой замены фрикционных накладок,тормоза.
Цель нзобретення - увеличение долго,Q вечности привода за счет уменьшения работы буксования в тормозе поворота.
Указанная цель достигается тем, что гидравлический привод снабжен выполненными из связанных посредством двуплечего рычага двухпозиционного клапана и пневtS матическсгй камеры органом блокировки и опережения действия тормоза поворота и установленным в магнстралн тормоза по-, ворота дросселем, при этом тормоз реверсируемой гидродинамической передачи, фрнк цион реверс-редуктора и тормоз поворота
связаны с органом блокировки и опережения а пневмокамера связана с дросселем.
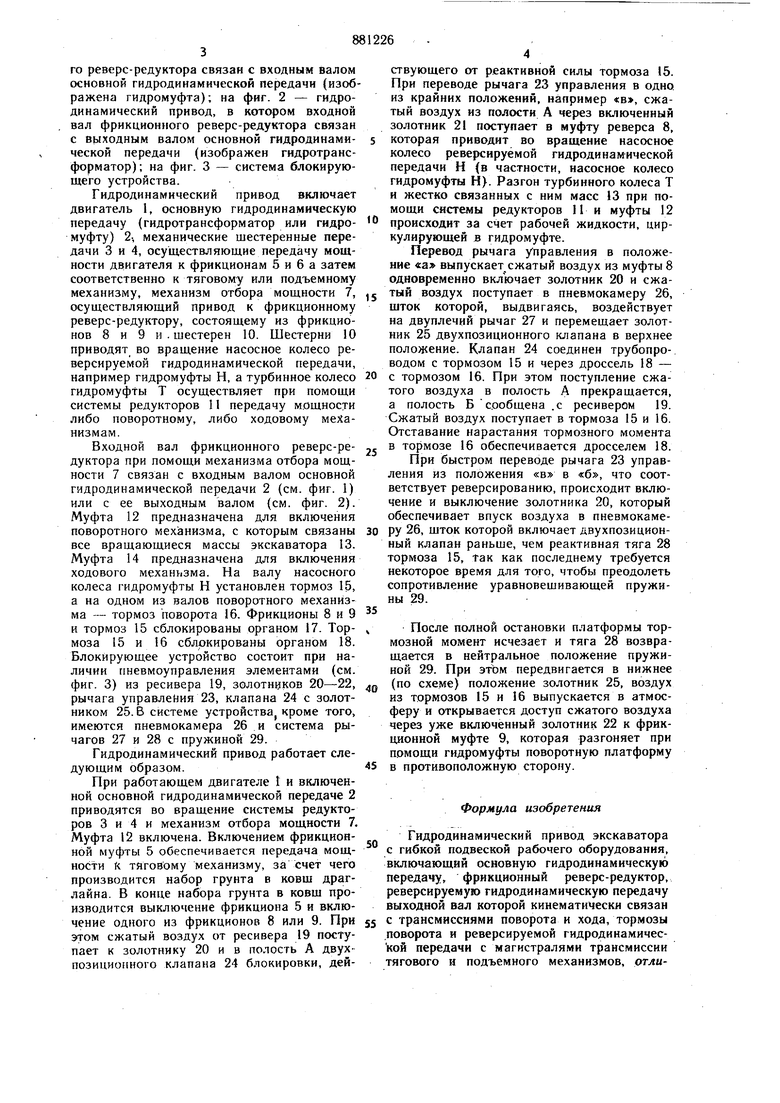
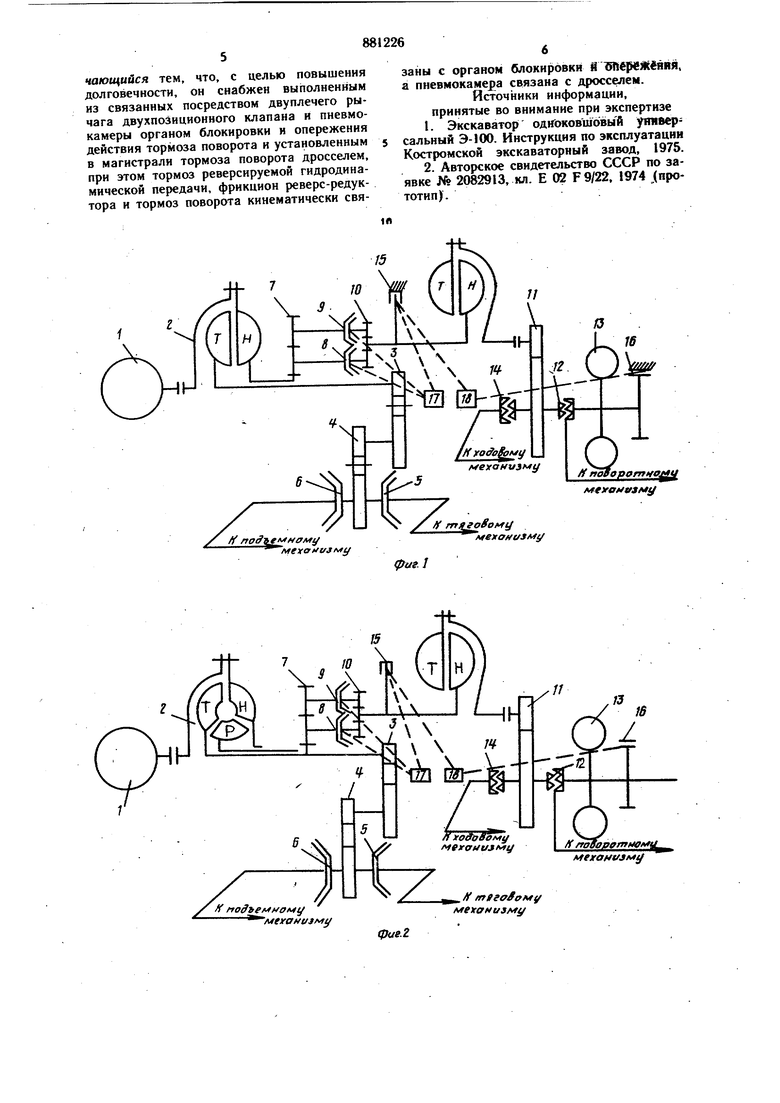
На фн.г. 1 изображен гндродннамнческнй привод, в котором входной вал фрнкциоиного реверс-редуктора связан с входным валом основной гидродинамической передачи (изображена гидромуфта); на фиг. 2 - гидродинамический привод, в котором входной вал фрикционного реверс-редуктора связан с выходным валом основной гидродинамической передачи (изображен гидротрансформатор) ; на фиг. 3 - система блокирующего устройства.
Гидродинамический привод включает двигатель 1, основную гидродинамическую передачу (гидротрансформатор или гидромуфту) 2-, механические шестеренные передачи 3 н 4, осуществляющие передачу мощности двигателя к фрикционам 5 и 6 а затем соответственно к тяговому или подъемному механизму, механизм отбора мощности 7, осуществляющий привод к фрикционному реверс-редуктору, состоящему из фрикционов 8 и 9 и . шестерен 10. Шестерни 10 приводят во вращение насосное колесо реверсируемой гидродинамической передачи, например гидромуфты Н, а турбинное колесо гидромуфты Т осуществляет при помощи системы редукторов 11 передачу мощности либо поворотному, либо ходовому механизмам.
Входной вал фрикционного реверс-редуктора при помощи механизма отбора мощности 7 связан с входным валом основной гидродинамической передачи 2 (см. фиг. 1) или с ее выходным валом (см. фиг. 2). Муфта 12 предназначена для включения поворотного мех;анизма, с которым связаны все вращающиеся массы экскаватора 13. Муфта 14 предназначена для включения ходового механьзма. На валу насосного колеса гидромуфты Н установлен тормоз 15, а на одном из валов поворотного механизма -- тормоз поворота 16. Фрикционы 8 и 9 и тормоз 15 сблокированы органом 17. Тормоза 15 и 16 сблокированы органом 18. Блокирующее устройство состоит при наличии пневмоуправления элементами (см. фиг. 3) из ресивера 19, золотников 20-22, рычага управления 23, клапана 24 с золотником 25. В системе устройства, кроме того, имеются пневмокамера 26 и система рычагов 27 и 28 с пружиной 29.
Гидродинамический привод работает следующим образом.
При работающем двигателе I и включенной основной гидродинамической передаче 2 приводятся во вращение системы редукторов 3 и 4 и механизм отбора мощности 7. Муфта 12 включена. Включением фрикционной муфты 5 обеспечивается передача мощности R тяговому механизму, за счет чего производится набор грунта в ковщ драглайна. В конце набора грунта в ковщ производится выключение фрикциона 5 и включение одного из фрикционов 8 или 9. При этом сжатый воздух от ресивера 19 поступает к золотнику 20 и в полость А двухпозиционного клапана 24 блокировки, действующего от реактивной силы тормоза 15. При переводе рычага 23 управления в одно из крайних положений, например «в, сжатый воздух из полости А через включенный золотник 21 поступает в муфту реверса 8, которая приводит во вращение насосное колесо реверсируемой гидродинамической передачи Н (в частности, насосное колесо гидромуфты Н. Разгон турбинного колеса Т и жестко связанных с ним масс 13 при помощи системы редукторов Пи муфты 12
происходит за счет рабочей жидкости, циркулирующей в гидромуфте.
Перевод рычага управления в положение «а выпускает сжатый воздух из муфты 8 одновременно включает золотник 20 н сжатый воздух поступает в пневмокамеру 26, щток которой, выдвигаясь, воздействует на двуплечий рычаг 27 и перемещает золотник 25 двухпозиционного клапана в верхнее положение. Клапан 24 соединен трубопро-. водом с тормозом 15 и через дроссель 18 -
с тормозом 16. При этом поступление сжатого воздуха в полость А прекращается, а полость Б сообщена .с ресивером 19. Сжатый воздух поступает в тормоза 15 и 16. Отставание нарастания тормозного момента
в тормозе 16 обеспечивается дросселем 18. При быстром переводе рычага 23 управления из положения «в в «б, что соответствует реверсированию, происходит включение и выключение золотника 20, который обеспечивает впуск воздуха в пневмокамеРУ 26, щток которой включает двухпозиционный клапан раньше, чем реактивная тяга 28 тормоза 15, так как последнему требуется некоторое время для того, чтобы преодолеть сопротивление уравновешивающей пружины 29.
После полной остановки платформы тормозной момент исчезает и тяга 28 возвращается в нейтральное положение пружиной 29. При этом передвигается в нижнее
(по схеме) положение золотник 25, воздух из тормозов 15 и 16 выпускается в атмосферу и открывается доступ сжатого воздуха через уже включенный золотник 22 к фрикционной муфте 9, которая разгоняет при помощи гидромуфты поворотную платформу
в противоположную сторону.
Формула изобретения
Гидродинамический привод экскаватора с гибкой подвеской рабочего оборудования, включающий основную гидродинамическую передачу, фрикционный реверс-редуктор, реверсируемую гидродинамическую передачу выходной вал которой кинематически связан с трансмиссиями поворота и хода, тормозы поворота и реверсируемой гидродинамической передачи с магистралями трансмиссии тягового и подъемного механизмов, рглычающийся тем, что, с целью повышения долговечности, он снабжен выполненным из связанных посредством двуплечего рычага двухпозиционного клапана и пневмокамеры органом блокировки и опережения действия тормоза поворота и установленным в магистрали тормоза поворота дросселем, при этом тормоз реверсируемой гидродинамической передачи, фрикцион реверс-редуктора и тормоз поворота кинематически связаны с органом блокировки и ШёрвЯсёяня, а пневмокамера связана с дросселем.
Источники информации, принятые во внимание при экспертизе
1.Экскаватор одноковшовый универсальный Э-100. Инструкция по эксплуатации Костромской экскаваторный завод, 1975.
2.Авторское свидетельство СССР по заявке № 2082913, кл. Е 02 F9/22. 1974 jnpoтотип).,
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидродинамический привод | 1978 |
|
SU994652A1 |
| ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА ДЛЯ ПУТЕВОЙ МАШИНЫ | 2012 |
|
RU2500939C1 |
| Гидромеханическая тансмиссияТРАНСпОРТНОгО СРЕдСТВА | 1976 |
|
SU850417A1 |
| Гидропривод одноковшового экскаватора | 1974 |
|
SU781279A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВРАЩЕНИЕМ ПОВОРОТНОЙ ПЛАТФОРМЫ ОДНОКОВШОВОГО ЭКСКАВАТОРА | 1967 |
|
SU214417A1 |
| Гидравлическая система управления трансмиссией | 1983 |
|
SU1111902A1 |
| СИЛОВОЙ БЛОК ДЛЯ ТРАНСПОРТНОЙ МАШИНЫ | 2002 |
|
RU2261815C2 |
| ГИДРОМЕХАНИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ | 1967 |
|
SU192634A1 |
| Гидромеханическая трансмиссия транспортного средства | 1975 |
|
SU598783A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТНЫМИ И НАГРУЗОЧНЫМИ РЕЖИМАМИ | 1991 |
|
RU2010734C1 |

/у noff MHaMt/ механизму У rrriieoSoi tj f exoffuiMe/ fi(f}puficiuony в Н
фиг. дзринциону 9
