(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ
-1
Изобретение относится к робототехнике и может быть использовано при создании адаптивных роботов.
Известны устройства для управления адаптивньпл роботом, содержащие пульт управления, приводы, датчики положения, блок коммутации и измерительный орган
Устройство не обладает.свойствами адаптации при перемещении в среде с препятствиями.
Наиболее близким техническим решением к изобретению является устройство, содержащее блок задания программы, датчики локальной коррекции и по каждой регулируемой координате последовательно соединенные сумматор, блок управления, привод и датчик положения, выход которого подключен к первому входу сумматора, второй вход каждого сумматора соединен с первым выходом блока задания программы 2.
Известное устройство не производит переключения или изменения знаков сигналов локальной коррекции по степеням подвижности робота в зависимости от их пространственного расiположения. РОБОТОМ
Цель изобретения - повышение точности и расширение функциональных возможностей устройства.
Цель достигается тем, что устройство содержит датчики рабочей зоны, логический блок и по каждой регулируемой координате блок умножения, первый вход которого подключен к выходу датчиков локальной коррек10ции, а выход - к третьему входу соответствующего сумматора, выходы датчиков рабочей зоны соединены с первыми входами логического блока,вторые входы которого подключены к вы15ходам датчиков локальной коррекции, третьи входы - к выходу датчиков положения, четвертый вход - ко второму выходу блока задания программы, а выходы - ко второму входу каждого
20 блока умножения.
Устройство додержит также по каждой регулируемой координате пороговый элемент, вход которого подключен, к соответствующему выходу логического ,
25 блока, а выход - ко второму входу соответствующего блока умножения.
Кроме того-, устройство содержит блок обучения, выход которого соединен с пятым входом логического блока.
30
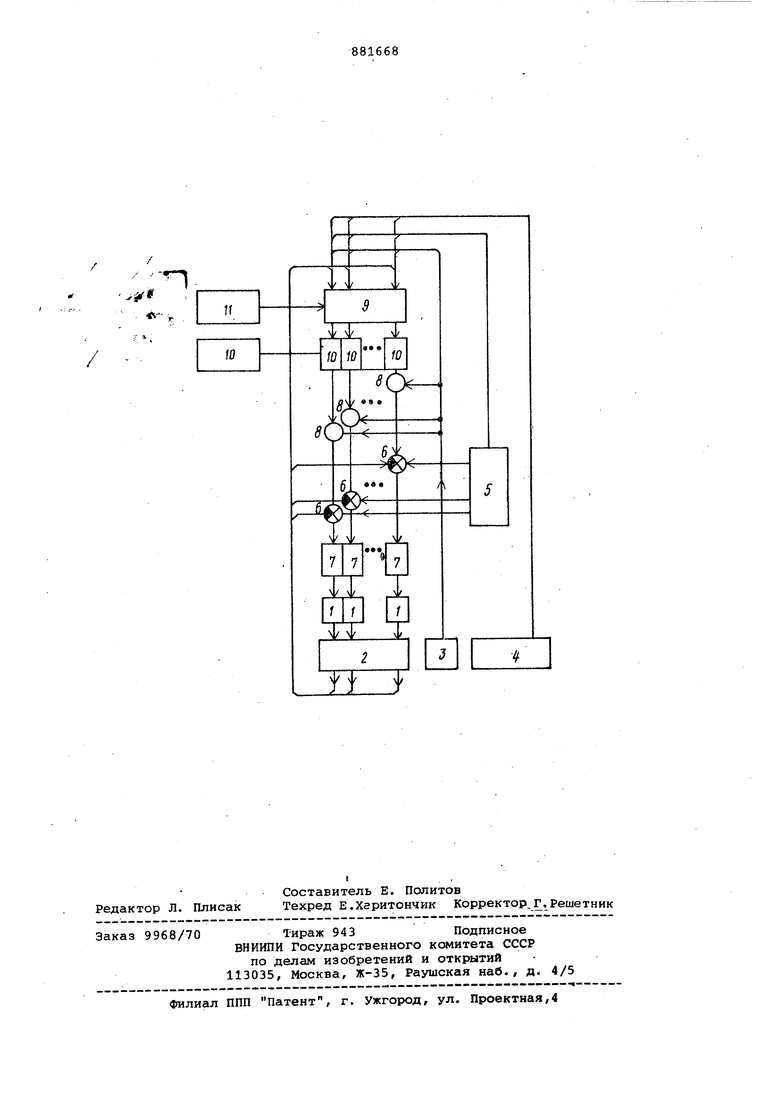
На чертеже представлена функциональная схема устройства.
Устройство содержит исполнительны орган 1, датчики 2 положения, датчики 3 локальной коррекции (ДЛК) .датчики 4 рабочей зоны, блок 5 задания программы, сумматоры б, блоки 7 управления, блоки 8 умножения, логический блок 9, пороговые элементы 10, блок 11 обучения.
Устройство работает следующим образом.
Блоки 1,2,5,6 и 7 составляют многоканальную систему управления, характерную для роботов, работающих по жесткой программе. На сумматорах 6, вырабатывающих сигналы рассогласований, имеются дополнительные входы, предназначенные для введения корректирующих сигналов от датчиков локальной коррекции(ДЛК} 3. Корректирующие сигналы от ДЛК 3 поступают на входы сумматоров 6 через блоки 8 умножения. Вторые входы блоков8 используются для редактирования сигналсв ДЛК 3 в каналах управления. Эти входы присоединены к выходам логического блока 9, который вырабатывает знакопеременные комутационные функции. Положительное значение коммутационной функции обеспечивает прямое включение ДПК 3 в контур канала управления, нулевое значение изолирует канал управления от системы коррекции (при этом канал реализует только жесткую программу), отрицательное значение обеспечивает коррекцию программного движения в противоположном направлении. Таким образом, блоки 8 определяют введение сигналов ДЛК 3 в любой канал или совокупность каналов с любы знаком или комбинацией знаков, а также отключение ДЛК 3 от каналов при нулевых значениях соответствующих коьмутационных функций.
Число коммутационных функций, формируемых в блоке 9, равно в общем случае числу степеней подвижности робота. Знакопеременные коммутационные функции необходимо сформировать таким образом, чтобы свои значения они принима ли в заданных областях пространства естественных координат робота. В результате во время двигательного акта может быть обеспечено нужное изменение знака корректирующего сигнала , вовлечение в синергию допол нительных степеней подвижности или их отключение, переключение корректирующих сигнёшов с однрй степени подвижности на другую, т.е. редактирование информации ДЛК в зависимости от позы.
Ограничение требований к кс 1мутационным функциям значения ,0, позволяет фоЕЯИировать их в большийстве случаев как линейные комбинации сигналов даочиков 2 положения. Однако при этом нули коммутационных функций появляются лишь весьма кратковременно, т.е. в процессе корректирующей синергии почти всегда вовлекаются все степени подвижности. При кинематической избыточности,т.е. практически всегда, желательно ограничиться доопределением движения лишь с пс 1ощью наиболее эффективных в данный момент звеньев кинематической цепи. Дпя этого нужно исключить звенья, возможное движение которых близко к ортогональному (по -отношению к направлению коррекции). С этой целью с помощью пороговых элементов 10 осуществляется расширение интервала, в котором малоэффек-; тивные степени подвижности исключаются из синергии. Это достигается двусторонним пороговым ограничением создающим зону нечувствительности в окрестности нуля коммутационной функции. Эта же мера ослабляет требования точности к коммутационньо функциям, т.е. облегчает и ускоряет их фОЕМИрование. Благодаря пороговым элементам 10 в программном движении сохраняются в основном компоненты, ортогональные к направлению, которое контролируется ДЛК 3. В целостном движении программные и корректирующие компоненты находятся в отношениях, близких к ортогональным.
Одновременно пороговые элементы 10 служат для отключения системы локальной коррекции при необходимости восстановления приоритета программного движения по всем координатам. С этой целью в блоке 10 предусматривают возможность управляемого изменения порогов. Для полного устранения влияний ДЛК на программное движение пороги блока 10 повышают за пределы максимального значения коммутационных функций. В качестве простейших коммутационных функций целесообразно использовать линейные комбинации. При синтезе коммутационных функций иногда обременительно использовать расчетные методы. Поэтому в схеме робота предусмотрен блок 11, автоматизирующий подбор подходящих коэффициентов.
У робота, адаптированного к одной программе, может наблюдаться перенос навыков при исполнении другой программы. Иногда это нежелательно, ;Так как в новой программе в аналогичных поршнях могут потребоьаться иные и даже противоположные коррекции (избегание или обход вместо сближения и т.п.). Переобучение при :этом нежелательно, так как разрушается редакция синергии, по тезная при выполнении первой программы.Дпя преодоления этих недостатков в логическом блоке 9.используют дополиигельные переменные/ в качестве которых используют сигналы, определяющие код (номер) выполняемой программы, а также сигнал датчиков 4 в рабочем поле. ДЛК 3 также относится к датчикам последнего типа. Это позволяет связывать значения коммутационных функций с изменением обстановки, характером и особенностями выполняемой программы.
Применение изобретения за счет соответствующей коктутации сигналов локальной коррекции позволяет расширить функциональные возможности устройства.
Формула изобретения
Устройство для управления адаптивным роботом, содержащее блок задания программы, датчики локальной коррекции и по каждой регулируемой координате последовательно соединенные сулматор, блок управления, привод я датчик положения, выход которого подключен к первому входу cy Ф aтopa, второй вход каждого сумматора соединей с первым выходном блока задания программы, отличающееся тем, что, с целью повышения точности устройства, оно содержит датчики рабочей зоны, логический блок и по каж дои регулируемой координате блок умн жения, первый вход которого подключен к выходу датчиков локальноГ коррекции , а выход - к третьему входу соответствующего сумматора, выходы датчиков рабочей зоны соединены с первыми входами логического блока, вторые входы которого подключены к выходам датчиков локальной коррекции третьи входы - к выходу датчиков положения, четвертый вход - ко второму выходу блока задания программы, а выходы - ко второму входу каждого блока умножения.
2.Устройство по п.1, о т л ичающееся тем, что, с целью расширения функциональных возможноетей устройства, оно содержит по каждой координате пороговый элемент, вход которого подключен к соответствующему выходу логического блока,
а выход - ко второму входу соответствующего блока умножения.
3.Устройство по П.1, о т л ичающееся тем, что, с целью расширения функциональных возмож- ностей, оно содержит блок обучения, вых,сд которого соединен с пятым входом логического блока.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР О 621571, кл. В 25 J 9/00, 1977.
2.Юревич Е.И. Интегральный робот ЛПИ-2. Сб. Робототехника, Л., 1977, с. 3-9 (прототип).
ТГ i
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ И ЛИНЕЙНО ПЕРЕМЕЩАЕМЫМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОСНОВАНИЕМ | 2022 |
|
RU2794082C1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1555080A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2146999C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2054349C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| Устройство для управления приводом робота | 1990 |
|
SU1764990A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| КАСКАДНАЯ ДВУХКАНАЛЬНАЯ САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО УПРАВЛЕНИЯ | 2006 |
|
RU2327196C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1999 |
|
RU2147000C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1998 |
|
RU2129953C1 |