(54) УСТРОЙСТВО ДЛЯ СОРТИРОВКИ ДЕТАЛЕЙ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сортировки ферромагнитных изделий | 1986 |
|
SU1509133A1 |
| Устройство для сортировки ферромагнитных деталей | 1989 |
|
SU1743653A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля | 1979 |
|
SU817880A1 |
| Способ сортировки корнеклубнеплодов и устройство для его осуществления | 1985 |
|
SU1253476A1 |
| Устройство для управления магнитным потоком асинхронной машины | 1981 |
|
SU987771A1 |
| Тренажер для подготовки яхтсменов | 1987 |
|
SU1515184A1 |
| Устройство когерентного приема фазоманипулированных сигналов | 1985 |
|
SU1305891A1 |
| Устройство для сортировки корнеклубнеплодов | 1987 |
|
SU1463167A1 |
| Устройство для измерения температуры поверхности ферромагнитных тел | 1987 |
|
SU1530940A1 |
| Устройство для сортировки деталей | 1991 |
|
SU1787591A1 |
1
Изобретение относится к контрольно-сортировочному оборудованию и может быть использовано для контроля качества термообработки деталей из ферромагнитных сплавов и их сортировке.
Известно устройство для сортировки деталей, содержащее наклонный лоток с охватывающими его катушкой иамагничивания и двумя измерительными катушками и блок сортировки {I}.
Недостатком этого устройства является влияние ориентации деталей, а также влияние их скорости прохождения через измерительную катушку.
Цель изобретения - повышение точности контроля.
Цель достигается тем, что устройство имеет блок обработки сигнала, состоящий из интеграторов, детекторов, блоков возведения в квадрат, сумматора и блока извлечения корня, соединенного с блоком сорти-. ровки, пр.ичем входы интеграторов подсоединены к измерительным катушкам, плоскости витков которых ортогональны между собой и основанию лотка, а выходы через соответствующие детекторы - ко входам
блоков возведения в квадрат, выходы которых связаны с первым и вторым входом сумматора, вмход которого подключен ко входу блока извлечения корня.
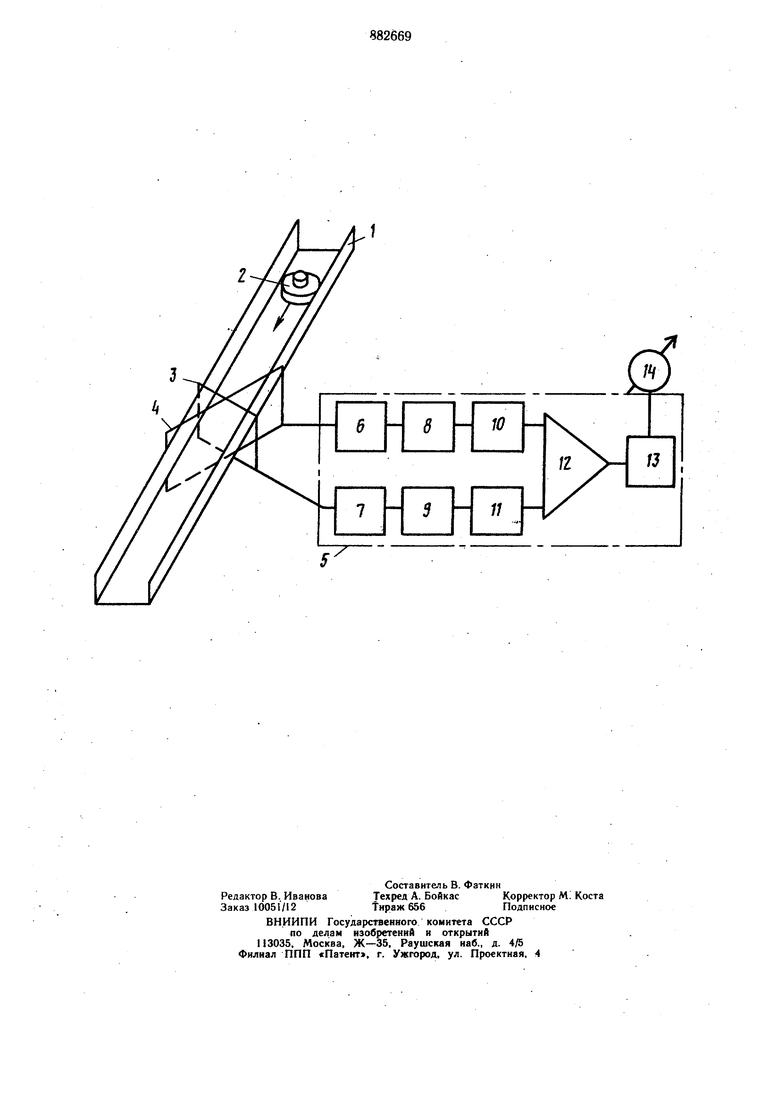
На чертеже представлено устройство для сортировки деталей. Устройство содержит наклонный лоток I, по которому перемещается контролируемая деталь 2, катушку намагничивания (на чертеже не показана), изм.ерительные катушки 3 и 4. К выходам измерительным катушек
10 3 и 4 подключен блок 5 обработки сигнала, состоящий из 2-х интеграторов 6 и 7, выходы которых через детекторы 8 и 9 подключены к блокам 10 .и 11 возведения в квадрат. Выходы блоков 10 и II возведения в квадрат соединены со входами сумматора 12,
15 подключенного к блоку 13 извлечения кория, который соединен с блоком 14 сортировки. Измерительные катушки w, и w, расположены симметрично относительно продольной оси лотка, а плоскости их витков WI и W взаимно перпендикулярны.
Устройство работает следующим образом. Контролируемая деталь по лотку 1 пролетает в обмотку катушки намагиичиваиия,
где намагничивается и пролетает через измерительные катушки 3 и 4, в каждой из которых при пересечении остаточным магнитным полем детали витков катушек 3 h 4 наводятся ЭДС
ewi e cosot ewj e sinef,
где ew, - ЭДС в обмотке катушки 3; ewj - ЭДС в обмотке катушки 4; а„ - ЭДС в обмотках W) и W2 при условии, если вектор остаточной индукции перпендикулярен плоскости обмоток; J, угол между направлением вектора остаточной индукции и плоскостью обмотки,
Сигналы с измерительных катушек 3 и 4 подаются на входы интеграторов 6 и 7, после интегрирования сигналы детектируются в детекторах 8 и 9. Интеграторы устраняют зависимость входного сигнала от скорости пролета деталей.
Из закона электромагнитной индукции
известно, что е -, где Ф - магнитный поток; е - ЭДС.
Мгновенное значение силы тока определяется i - полное сопротивление цепи.
Величина прошедшего заряда, а следовательно, и сигнал, снимаемый с интеграторов 6 и 7 .определяется соотношением
q f J аФ .
Следовательно, величина заряда, прошедшего по цепи, пропорциональна изменению магнитного потока и обратно пропор-циональна сопротивлению цепи и независит, от скорости пролета, деталей. Сигналы с детекторов 8 и 9 поступают в блоки 10 И И возведения в квадрат. Сблока 10 снимают сигналы ,c блока 11 - сигнал . Сигналы с блоков 10 и 11 возведения
в квадрат поступают на входы сумматора 12, где суммируются
, + - е2„ (cosU -f .) e, .
Следовательно, сигнал, снимаемый с сумматора, не зависит от угла ориентации деталей при пролете по наклонному лотку. Для получения линейной характеристики выходной сигнал сумматора 12 поступает на блок 13 извлечения корня, сигнал с которого подается нз блок сортировки 14.
Такое выполнение устройства для сортировки .деталей позволяет повысить точность контроля за счет исключения влияния ориентации и скорости движения деталей, позволяет надежно и высокопроизводительно контролировать такие детали, как гайки, шайбы, короткие винты, болты.
Формула изобретения Устройство для сортировки деталей, содержашее наклонный .лоток с охватывающими его катушкой намагничивания и двумя измерительными катушками и блок сортировки, отличающееся тем, что, с целью повышения точности контроля,, оно имеет блок обработки сигнала, состояший из интеграторов, детекторов, блоков возведения в квадрат, сумматора и блока извлечения корня, соединенного с блоком сортировки, причем входы интеграторов подсоединены к измерительным катушкам, плоскости витков Kotopbix ортогональны между собой и
основанию лотка, а выходы через соответствующие детекторы - ко входам блоков возведения в квадрат, выходы которых связаны с первым и вторым входом сумматора, выход которого подключен ко входу блока извлечения корня.
. Источники информации, принятые во внимание при экспертизе 1. Современные методы контроля материалов без разрушения. Под ред. Назарова С. Т.,-М., Машгиз, 1961, с. 213 (прототип).
