(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ АСИНХРОННОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления магнитным потоком асинхронной машины | 1980 |
|
SU866683A1 |
| Устройство для управления асинхронным электродвигателем | 1985 |
|
SU1252903A1 |
| Устройство для управления магнитным потоком асинхронной машины | 1984 |
|
SU1246320A1 |
| Устройство для измерения частоты вращения вектора магнитного потока машины переменного тока | 1980 |
|
SU892373A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Устройство для определения параметров трехфазной асинхронной машины | 1969 |
|
SU553949A3 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Электропривод переменного тока | 1983 |
|
SU1131011A1 |
| Устройство для определения характеристик гистерезисного электропривода | 1984 |
|
SU1251276A1 |
| Электропривод с асинхронной машиной | 1971 |
|
SU548220A3 |
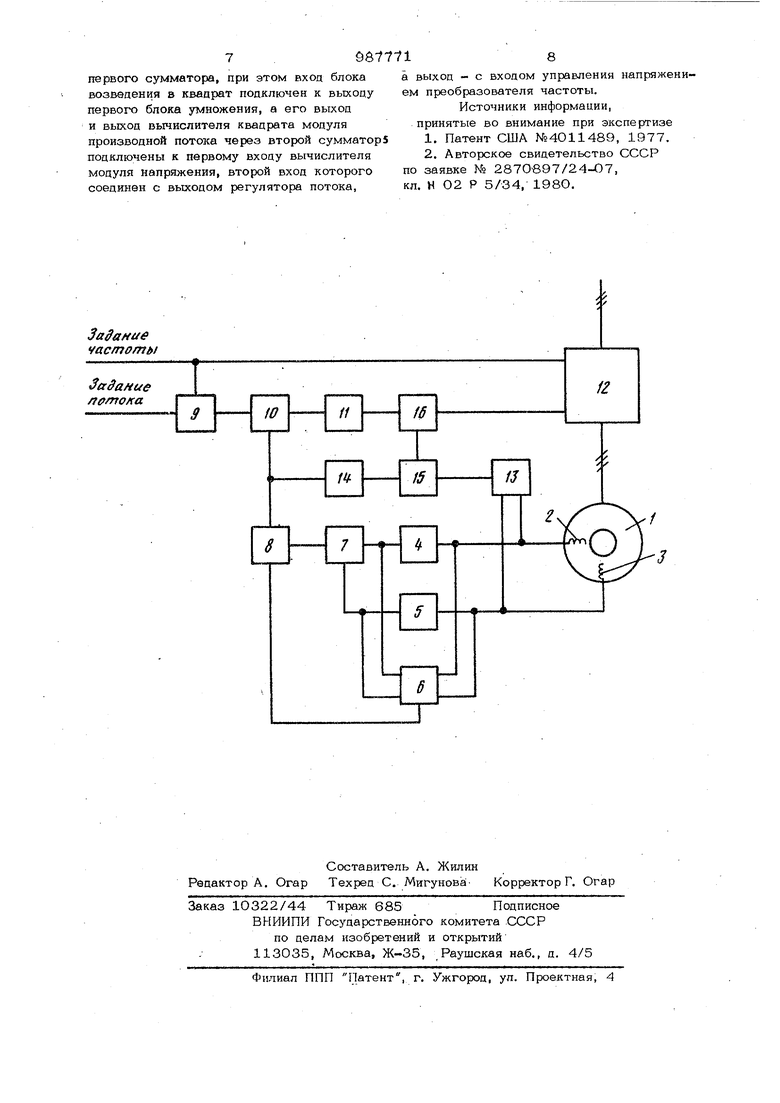
Изобретение относится к электротехнике и мокат быть использовано для регулирования магнитного потока в асинхронных машинах в системах и механизмах общепромышленного назначения. Известно устройство для управления магнитным потоком асинхронной машины, содеркашее три измерительные катушки, расположенные на статоре асинхронной машины, три интегратора, соединенные с выпрямителем, задатчик потока, регулятор потока, BbLxoa которого подключен к первому входу блока умножения, второ вход блока умножения соединён с входом управления тиристорного преобразователя частоты, соединенного со статорными обмотками асинхронной машины 1 . Однако известное устройство не обеспечивает высокой точности работы, так как в нем не производится .управление магнитным потоком R пеоеходных режима Наиболее близким к.изобретению по технической сущности является устройство для управления магнитным поТОКОМ асинхронной машины, содержащее установленные на статоре асинхронной машины две измерительные катушки, первая из которых через первый интегратор подключена к одному из входов вычислителя модуля вектора потока, другая через второй интегратор подключена к второму входу вычислителя модуля вектора потока, выход которого соединен с первым входом первого блока умножения, определитель частоты врашения вектора потока, входы которого соединены с измерительными катушками и выходами интеграторов, а выход - с вторым входом первого блока умножения, выход которого через первый вход первого сумматора и регулятор потока связан с входом управления напряжения преобразователя частоты, соединенного со ста- торными обмотками асинхронной машины, вычислитель KsaajxaTa модуля производной потока, подключенный входами к измерительным катушкам, второй сумматбр, задатчик потока и задатчик частоты, 3 соединенный с входом управления частот преобразователя частоты С 2 3. В этом устройстве выделяется сигнал пропорцнокальный модулю потокосцепле™ ния, которьй сравнивается с сигналом задания. Образующийся сигнал подается на регулятор. Затем этот сигнал ум- ножается на частоту Шцр вращения .ек- fopa потока. Таким образом, образующий ся контур регулирования установившегося сигнала имеет коэффициент усиления KLOj,p где К « коэ4)4 ициент усиления регу лятора. Общее значение коэффициента К(А)(,; ограничено условиями, устойчивости системы, так как величина частоты вращения вектора, потока определяется частотой иапржкения статора. Например, еслз частота напряжения составляет 5О Гц я число нар полюсов мащины Р 1, то |-оы 314 1/с и даже .при небольщих коэффициентах передачи регул тора ( К 5) получается больщой общи коэс1)фицкент передачи контура при малом коэфсрициенте регулятора. Это обстоятель ство огран5мивает точность управления магиитньл потоком асинхронной мащи- ны. Цель изобретения - повьщ1ение точное TI управления магнитным потоком асинхронной машины, У.; :азанная цель достигается тем, что в устройство для управления магнитным ПОТО7СОМ асртхронной мащины введены бло.к возведения в 7свадрат, вычислитель модуля напряясения и второй блок умно жения, .входы которого подключены к вы ходам задатчиков потока и частоты,.а выход « к второму входу нервогх) сумма тора, при этом вход ;блока возведения в квадрат подключен к выходу первого блока умножения, V-a его выход и выход вычислителя квадрата модуля производной потока через второй сумматор подключен к первому входу вычислителя модуля напр.яжения, второй вход которого соединен с выходом регулятора потока, а вььход - с входом управления напряжением .преобразователя частоты. Та.кое устройство обеспечивает более высокую точность потому, что на выходе регулятора сравниваются величины .0 ,,,о ... . . ,., 03,4° VO и ы, Hs Sm Vs Sm задэнные значения частоты и модуля вектора потокосценления, шц, , Mic фактические значения частоты и модуля вектора потокосцепдения. На чертеже представлена структурная схема устройства для управления магнит Ным потоком асинхронной машины. Устройство додержит асинхронную машину i с измерительными катушками 2 и 3, интеграторы 4 и 5, определитель 6 частоты вращения вектора потока, вычислитель 7 модуля вектора потока, первый 8 и второй 9 блоки умножения, первый сумматор 1О, регулятор 11 потока, преобразователь 12 частоты, вычислитель 13 квадрата модуля производной потока, блок 14 возведения в квадрат, второй сумматор 15 и вычислитель 16 модуля напряжения. Входы измерительных катущек 2 и 3 соединены с входами интеграторов 4 и 5и определителя 6 частоты вращения вектора потока, на входы которого та.кн{е подсоединены выходы интеграторов 4 и 5. Вьтходы интеграторов 4 и 5 подключе ны .также к входам вычислителя 7 модуля вектора потока. Выходы определителя 6частоты вращения вектора потока и вычислителя 7, модуля вектоЬа потока подключены к входам блока 8 умножения, выход которого подсоединен к входу первого сумматора 1О. Второй вход первого сумматора 10 подключен к выходу второго блока 9 умножения, первый и второй входы которого соединены с выходами задатчиков потока и частоты соот- вественно. Выход первого cyM iaropa 10 подсоединен к входу регулятора 11 потока, выходом подключенного к первому входу вычислителя 16 модуля напряжения, второй вход которого подключен к выходу в торого сумматора 15. К выходам измерительных катущек 2 и 3 подключен вычислитель 13 квадрата модуля производной потока, выход которого подключен к второму входу второго сумматора 15, на первый вход которого подключен выход блока 14 возведения в квадрат, вход которого подключен к вьгходу первого блока 8 умножения. Вы- i ход вычислителя 16 модуля напряжения подключен к входу управления напряжением преобразователя 12 частоты. Устройство для управления магнитньш потоком асинхронной машины работает следующим образом. Магнитный поток асинхронной машины индуктирует ЭДС в измерительных катушках 2 и 3, установленных в ортогональных осях статора. На выходах интеграторов 4 и 5 формируются мгновенные значения составляющих потока. По выходным сигналам интеграторов 4 и 5 в вьпислителе 7 модуля вектора потока образуется сйгнал Vc i пропорциональный модулю вектора потока. По-выходным сигналам интеграторов и 5 и измерительных катушек 2 и 3 определителе 6 частоты образуется сигнал, пропорциональный частоте вращения вектора потока. На выходе блока 8 умножения пол чаем а- Кв По выходным сигналам измеритель катушек 2.. и 3 в вычислителе 13 фо мируется сигнал (.ц.Ч - производная потока; -Ш.- производная модуля вект - потока. На выходе блока 14 формируется л5п,) -14 (, е.. К, а на выходе сумматора 15 формируется сигнал / а, 2 т.е. Бьщеляется переходная составляюща в сигнале задания напряжения статора. На входы блока 9 умножения подаются сигналы, пропорциональные заданию Ц потока и заданию vjp ы частоты вращен вектора потока. На выходе блока 9 умножения образуется сигнал сумматоре 1О сигналы бдИ бд сравни ваются е,, ,- ц и передаются в регулятор 11 потока, на выходе которого формируется сигнал где К - коэффициент передачи регулятора 11 потока. Для того, чтобы обеспечить высокую точность управления, сигнал задания дол жен содержать информацию как об установившейся составляющей напряжения статора, так и о переходной dVl. составляющей. . Сигнал, пропорцио нальный квадрату переходной составляю- шей, образующийся на выходе сумматора 15подается на вход вьпшслителя 16 модуля напряжения, -другой вход которого ройключается к выходу регулятора 11 потока. Сигнал с выхода вычислйтеля 16модуля напряжения подается на вход управления напряжением преобразователя 12 частоты. Вычислитель 16 модуля напряжения работает согласно выражению 6i6 H 2i:;; Таким образом, в предлагаемом устройстве по сравнению с известным обеспечивается возможность установления более высоких коэффициентов передачи регулятора потока, благодаря чему повышается и точность управления магнитным потоком в асинхронной машине. Формула изобретения Устройство для управления магнитным потоком асинхронной машины, содержащее установленные на статоре асинхроннЪй машины две измерительные катушки, из которых через первый интегратор подключена к одному из входов вычислителя модуля вектора потока, другая через второй интегратор подключена к второму входу вычислителя модуля вектора потока, выход которого соединен с первым входом первого блока умножения, определитель частоты вращения вектора ,-потока, входы которого соединены с измеритель- ными катушками и выходами интеграторов, а выход - с вторым входом первого блока умножения, выход которого через первый вход первого сумматора и регулятор потока связан с входом управления напряжения преобразователя частоты, сое- диненного со ста торными обмотками асинхронной машины, вычислитель квадрата модуля производной потока, подключенный входами к измерительным катушкам, второй сумматор, задатчик потока и за- датчик частоты, соединенный с входом управления частоты преобразователя часготы, отличающееся тем, что, с целью повышения точности управления, в него введены блок возведения в квадрат, вычислитель .модуля напряжения и второй блок умножения, входы которого подключены к выходам задатчиков потока и частоты, а выход - к второму входу 708-7 первого сумматора, при этом вход блока возведения в квадрат подключен к выходу первого блока умножения, а его выход и выход вычислителя квадрата модуля производной потока через второй сумматор подключены к первому входу вычислителя модуля напряжения, второй вход которого соединен с выходом регулятора потока,
Задание частоты 1 а выход - с входом управления напряжением преобразователя частоты. Источники информации, принятые во внимание при экспертизе 1.Патент США №4011489, 1977. 2.Авторское свидетельство СССР по заявке № 2870697/24-07, кл. Н О2 Р 5/34, 198О.
