контроля за параметрами движения плав- рата его текущей скорости относитель20
25
средства без фактического перемещения его корпуса по отношению к цели.
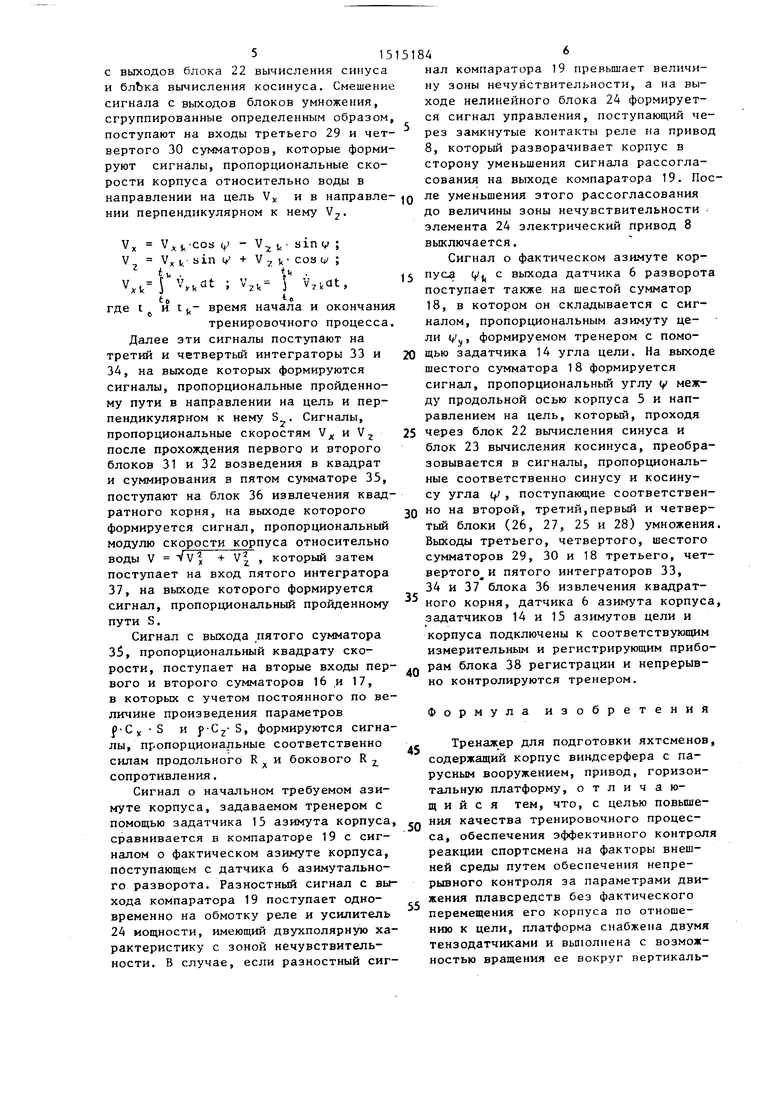
На фиг. 1 схематично показан предлагаемый тренажер; на фиг..2 - блок- схема устройства.
Тренажер содержит мачту 1, парус 2, гики 3, Корпус А виндсерфера, платформу 5, датчик 6 азимута корпуса, вертикальную ось 7 платформы, привод 8, пульт 9 управления, первый тензодатчик 10, второй тензодатчик 11, первый фильтр 12 низких частот, второй фильтр 13 низких частот, задат- чик 14 азимута цели, задатчик 15 начального азимута корпуса (платформы), JQ первый сумматор 16, второй сумматор 17, щестой сумматор 18, компаратор 19, первый интегратор 20, второй интегратор 21, блок 22 вычисления синуса, блок 23 вычисления косинуса нелинейности, усилитель 24 мощности, первый блок 25 умножения, второй блок 26 умножения, третий блок 27 умножения, четвертый блок 28 умножения, сумматор 29, четвертый сумматор 30, первый блок 31 I возведения в квадрат, второй блок 32 возведения в квадрат, третий интегратор 33, четвертый интегратор 34, пятый сумматор 35, блок 36 извлечения квадратного корня, пятый интегратор 37, блок 38 регистрации, реле 39.
Тренажер работает следующим образом.
Сила тяги, развиваемая парусным вооружением при действии воздушного потока через рангоут, такелаж и тело спортсмена, представляется на платформу 5, при этом на выходах тензо- датчиков 10 и 11, оси чувствительности которых взаимно перпендикулярны, и расположены в плоскости платформы, появляются сигналы, пропорциональные продольной ГУ и боковой F-J силам.
но воды. На выходе первого и второго сумматоров 16 и 17 формируются сигналы, пропорциональные продольному V и боковому ускорению корпуса плавсредства, поступающие на входы первого и второго интеграторов 20 и 21.
35
40
4S
50
55
V
хк
-i(F.m
R.);
V.. - (F 2t
m
RZ).
где
m
R 2
- масса плавсредства;
-S - сипа лобового сопротивления корпуса;
R
г 2
- сила бокового сопротивления корпуса; f - плотность воды V - скорость корпуса
плавсредстваi
S - площадь смоченной поверхности корпуса; G - гидродинамический коэффициент продольного сопротивления данного корпусаJ
С 2 - гидродинамический коэффициент бокового сопротивления данного корпуса,
С выхода первого и второго интеграторов 20 и 21, в которых входные сигналы интегрируются по времени, преобразованные сигналы, пропорциональные продольной .V, и боковой скорости корпуса в воде, поступают на первый, второй, третий и четвертый блоки 25, 26, 27 и 28 умножения, где умножаются на сигналы, пропорциональные соответственно синусу и косинусу угла (V между продольной осью корпуса и направлением на цель, поступающие
но воды. На выходе первого и второго сумматоров 16 и 17 формируются сигналы, пропорциональные продольному V и боковому ускорению корпуса плавсредства, поступающие на входы первого и второго интеграторов 20 и 21.
V
хк
-i(F.m
R.);
V.. - (F 2t
m
RZ).
m
12
- масса плавсредства;
-S - сипа лобового сопротивления корпуса;
R
г 2
- сила бокового сопротивления корпуса; f - плотность воды V - скорость корпуса
плавсредстваi
S - площадь смоченной поверхности корпуса; G - гидродинамический коэффициент продольного сопротивления данного корпусаJ
С 2 - гидродинамический коэффициент бокового сопротивления данного корпуса,
С выхода первого и второго интеграторов 20 и 21, в которых входные сигналы интегрируются по времени, преобразованные сигналы, пропорциональные продольной .V, и боковой скорости корпуса в воде, поступают на первый, второй, третий и четвертый блоки 25, 26, 27 и 28 умножения, где умножаются на сигналы, пропорциональные соответственно синусу и косинусу угла (V между продольной осью корпуса и направлением на цель, поступающие
515
с выходов блока 22 вычисления синуса и блЬка вычисления косинуса. Смешени сигнала с выходов блоков умножения, сгруппированные определенным образом поступают на входы третьего 29 и четвертого 30 сумматоров, которые формируют сигналы, пропорциональные скорости корпуса относительно воды в направлении на цель Vx ив направлении перпендикулярном к нему V.
Vx V t cos V V,,,,- sinv ; V V + ;
2k V V.kdt,
tot
где t и t - время начала и окончания тренировочного процесса Далее эти сигналы поступают на третий и четвертый интеграторы 33 и
34,на выходе которых формируются сигналы, пропорциональные пройденному пути в направлении на цель и перпендикулярном к нему S . Сигналы, пропорциональные скоростям V и V после прохождения первого и второго блоков 31 и 32 возведения в квадрат и суммирования в пятом сумматоре 35, поступают на блок 36 извлечения квадратного корня, на выходе которого формируется сигнал, пропорциональный модулю скорости корпуса относительно воды V Vv + V| , который затем поступает на вход пятого интегратора 37, на выходе которого формируется сигнал, пропорциональный пройденному пути S.
Сигнал с выхода пятого сумматора
35,пропорциональный квадрату скорости, поступает на вторые входы первого и второго сумматоров 16 и 17,
в которых с учетом постоянного по величине произведения параметров р-Су S и S, формируются сигналы, пропорциональные соответственно силам продольного R , и бокового R -,
Л сопротивления.
Сигнал о начальном требуемом азимуте корпуса, задаваемом тренером с помощью задатчика 15 азимута корпуса, сравнивается в компараторе 19 с сигналом о фактическом азимуте корпуса, поступающем с датчика 6 азимутального разворота. Разностный сигнал с выхода компаратора 19 поступает одновременно на обмотку реле и усилитель 24 мощности, имеющий двухполярную характеристику с зоной нечувствительности. В случае, если разностный сиг51846
нал компаратора 19 превышает величину зоны нечувствительности, а на выходе нелинейного блока 24 формируется сигнал управления, поступающий через замкнутые контакты реле на привод 8, который разворачивает корпус в сторону уменьшения сигнала рассогласования на выходе компаратора 19. ПосQ ле уменьшения этого рассогласования до величины зоны нечувствительности элемента 24 электрический привод 8 выключается.
Сигнал о фактическом азимуте кор5 пус (j/i с выхода датчика 6 разворота поступает также на шестой сумматор 18, в котором он складывается с сигналом, пропорциональным азимуту цели Vj формируемом тренером с помо0 Щью задатчика 14 угла цели. На выходе шестого сумматора 1В формируется сигнал, пропорциональный углу у между продольной осью корпуса 5 и направлением на цель, который, проходя
5 через блок 22 вычисления синуса и
блок 23 вычисления косинуса, преобразовывается в сигналы, пропорциональные соответственно синусу и косинусу угла Lf , поступающие соответственQ но на второй, третий,первый и четвертый блоки (26, 27, 25 и 28) умножения. Выходы третьего, четвертого, шестого сумматоров 29, 30 и 18 третьего, четвертого и пятого интеграторов 33, 34 и 37 блока 36 извлечения квадратного корня, датчика 6 азимута корпуса, задатчиков 14 и 15 азимутов цели и корпуса подключены к соответствующим измерительным и регистрирующим приборам блока 38 регистрации и непрерыв0
45
50
5
но контролируются тренером. Формула изобретения
Тренажер для подготовки яхтсменов, содержащий корпус виндсерфера с парусным вооружением, привод, горизонтальную платформу, отличающийся тем, что, с целью повьш1е- ния качества тренировочного процесса, обеспечения эффективного контроля реакции спортсмена на факторы внешней среды путем обеспечения непрерывного контроля за параметрами движения плавсредств без фактического перемещения его корпуса по отношению к цели, платформа снабжена двумя тензодатчиками и вьпюлнена с возможностью вращения ее вокруг вертикальной оси, на платформе закреплен корпус виндсерфера, ысяснш конец вертикальной оси платформы является осью вращения привода, жестко закрепленного на неподвижном основании, на вертикальной оси установлен датчик азимута корпуса, оси чувствительности тензодатчиков платформы расположены взаимно перпендикулярно в ее плоскости, причем ось чувствительности одного из датчиков направлена вдоль диаметральной оси корпуса плавсредств, введены последовательно соединенные с выходом первого тен- водатчика- первый фильтр нижних частот, первый сумматор, первый интегратор, первый блок умножения, третий сумматор, первый блок возведения в квадрат, пятый сумматор, блок извлечения квадратного корня, выход которого соединен с первым входом блока регистрации, последовательно соединенные с выходом второго тензодатчика, второй фильтр нижних частот, второй сумматор, второй интегратор, четвертый блок умножения, четвертый сумматор и четвертый интегратор, выход которого соединен с вторым входом блока регистрации, последовательно соединенные с выходом датчика азимута корпуса шестой сумматор, блок вычисления синуса и третий блок умножения, выход которого соединен с вторым выходом третьего сумматора, последовательно соединенные задатчик начального азимута корпуса, компаратор и усилитель мощности, а также реле, блок вычисления косинуса, задатчик азимута
цели, второй блок умножения, второй блок возведения в квадрат, третий интегратор, причем обмотка реле подключена параллельно входу усилителя мощности,,выход которого через замыкающий контакт реле соединен с входом привода, задатчик азимута цели соединен с третьим входом блока регистраQ ции и вторым входом шестого сумматора, первый вхрд которого соединен с вторым входом компаратора и четвертым входом блока регистрации, пятый вход которого соединен с выходом задатчика
5 начального азимута корпуса, выход шестого сумматора соединен с шестым выходом блока регистрации и входом блока вычисления косинуса, выход которого соединен с вторыми входами
Q первого и четвертого сумматоров,
второй вход третьего блока умножения соединен с выходом второго интегратора, первые входы первого и третьего блоков умножения соединены соответст5 венно с первым и вторым входами второго блока умножения, выход которого соединен с вторым входом четвертого сумматора, выход которого соединен 6 седьмым входом блока регистрации
0 и через второй блок возведения в квадрат - с вторым входом пятого сумматора, выход которого соединен с вторыми входами первого и второго сумматоров, выход третьего сумматора соединен напрямую с восьмым входом блока регистрации и через третий интегратор - с девятым его входом, а десятый вход блока регистрации соединен с выходом блока извлечения квадратного корня.
5
/
фиг.1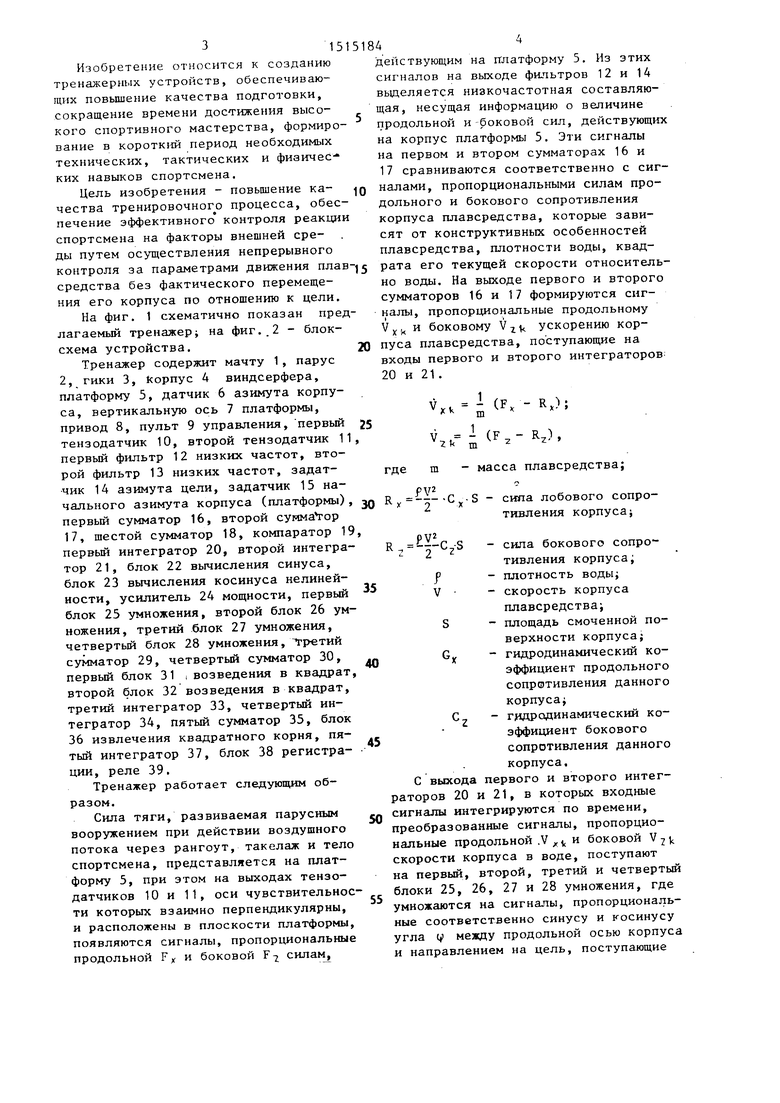
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления положением диаграммы направленности антенны подвижного объекта | 1990 |
|
SU1805451A1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 1995 |
|
RU2115947C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДИАГРАММЫ НАПРАВЛЕННОСТИ АНТЕННЫ МОБИЛЬНОЙ РЛС ОБНАРУЖЕНИЯ | 2001 |
|
RU2231820C2 |
| Устройство для моделирования удара твердых тел | 1988 |
|
SU1567889A2 |
| КУРСОВАЯ СИСТЕМА | 1990 |
|
RU2020418C1 |
| ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 1995 |
|
RU2087866C1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Цифровой измеритель показателей качества электрической энергии трехфазной сети | 1988 |
|
SU1633368A1 |
| Вентильный электропривод | 1986 |
|
SU1319221A1 |
Изобретение касается создания тренажерных устройств, обеспечивающих повышение качества подготовки, сокращение времени достижения высокого спортивного мастерства, формирование в короткий период необходимых технических, тактических и физических навыков спортсмена. Целью изобретения является повышение качества тренировочного процесса, обеспечение эффективного контроля реакции спортсмена на факторы внешней среды путем осуществления непрерывного контроля за параметрами движения плавсредства без фактического перемещения его корпуса по отношению к цели. Сила тяги, развиваемая парусным вооружением при действии воздушного потока, через рангоут, такелаж и тело спортсмена передается на платформу 5, которая снабжена тензодатчиками 10, 11, оси чувствительности которых взаимно перпендикулярны и расположены в плоскости тензоплатформы, которая выполнена с возможностью ее вращения вокруг вертикальной оси посредством привода 8. Ось платформы снабжена датчиком 6 азимута корпуса. Из сигналов тензодатчиков 10, 11 фильтрами 12, 13 нижних частот выделяется низкочастотная составляющая, несущая информацию о величине сил, действующих на платформу. Сигналы датчиков обрабатываются вычислительной схемой и поступают на блок 38 регистрации, а также на компаратор 19, выход сигнал которого зависит от положения задатчика 15 начального азимута корпуса. Этот сигнал, усиленный усилителем 24 мощности, поступает на привод 8, который отрабатывает заданное перемещение платформы 5. 2 ил.
| Тренажер для подготовки яхтсмена Карусель | |||
| - Катера и яхты, 1984, № 3, (109), с | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
