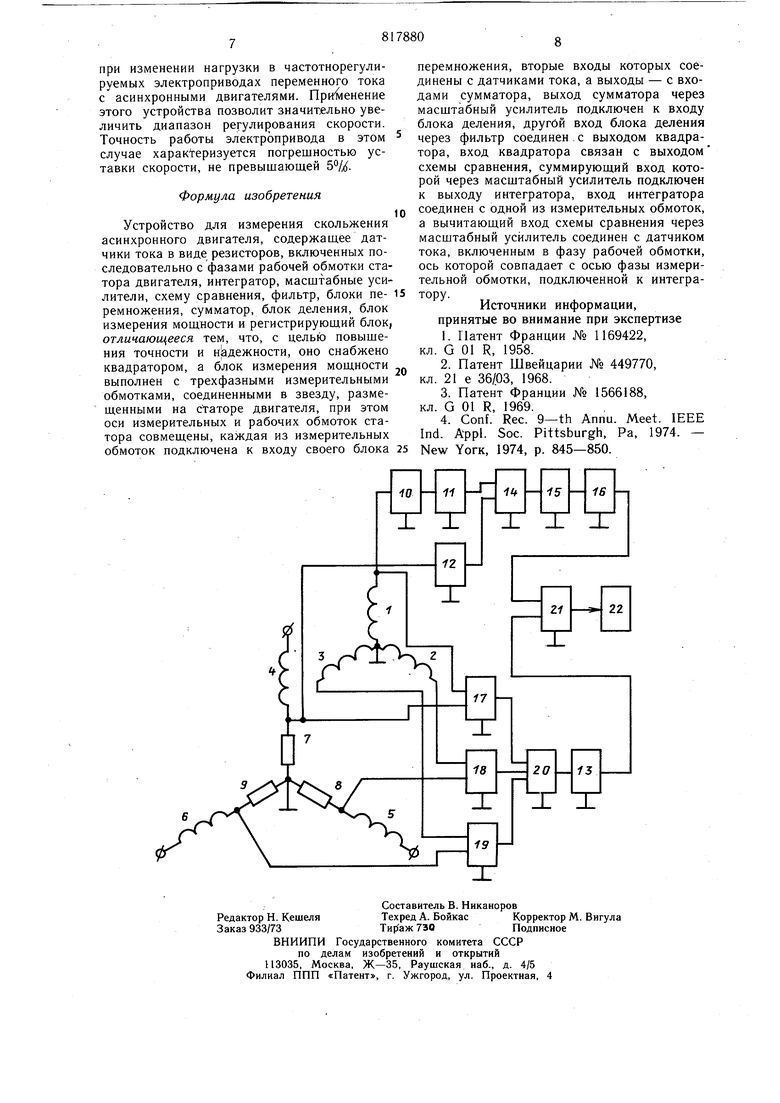
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОЛЬЖЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ устройств, был бесконтактным, простым в изготовлении и настройке и имел возможно меньшие габариты, чему не отвечают известные устройства. Наиболее близким по технической сущности к предлагаемому является устройство для измерения скольжения асинхронного двигателя, содержащее датчики тока в виде резисторов, включенных последовательно с фазами рабочей обмотки статора двигателя, интегратор, масштабные усилители, схему сравнения, фильтр, блоки перемножения, сумматор, блок деления, блок измерения мощности и регистрирующий блок 4. Недостатком устройства является его сложность, что снижает и точность работы и его надежность. Сложность устройства обусловлена наличием схемы измерения напряжений и токов двигателя в прямоугольной системе координат, которая содержит шесть операционных усилителей, два интегратора, и большое число вспомогательных элементов (резисторов, шунтов, трансформаторов). Схема требует значительных затрат времени на ее настройку для обеспечения даже сравнительно небольшой точности работы устройства в целом. Кроме того, в схеме измерений в качестве входных сигналов используются напряжения, подводимые к статору двигателя, которые в случае частотного управления скоростью асинхронного двигателя и применения автономных инверторов для этих целей содержат большой процент высших гармоник, что снижает точность. Цель изобретения - повышение точности и надежности устройства. Указанная цель достигается тем, что устройство снабжено квадратором, а блок измерения мошности выполнен с трехфазными измерительными обмотками, соединенными в звезду, размещенными на статоре двигателя, при этом оси измерительных и рабочих обмоток статора совмещены, каждая из измерительных обмоток подключена к входу своего блока перемножения, вторые входы которых соединены с датчиками тока, а выходы - с входами сумматора, выход которого через масштабный усилитель подключен к входу блока деления, другой вход блока деления через фильтр соединен с выходом квадратора, вход которого связан с выходом схемы сравнения, суммирующий вход которой через масштабный усилитель подключен к выходу интегратора, вход которого соединен с одной из измерительных обмоток, а вычитаюший вход схемы сравнения через масштабный усилитель соединен с датчиком тока, включенным в фазу рабочей обмотки, ось которой совпадает с осью фазы измерительной обмотки, подключенной к интегратору. На чертеже представлена блок-схема устройства. Устройство состоит из измерительных обмоток 1-3 в статоре асинхронного двигателя, оси которых совпадают с осями соответствующих рабочих обмоток 4-б двигателя, последовательно с которыми включены датчики тока (резисторы) 7-9,- интегратор 10, три масштабных усилителя 11 - 13, схема 14 сравнения, квадратор 15, фильтр 16, три блока 17-19 перемножения, сумматор 20, блок 21 деления, регистрирующий блок 22. С помощью устройства скольжение асинхронного двигателя определяется, исходя из выражения S ,П) где PJM - электромагнитная мощность асинхронного двигателя; 1г-ток ротора, приведенный к цепи статора;г - активное сопротивление ротора, приведенное к цепи статора; ш - число фаз статора. Прикладывая к входам блока 21 деления сигналы, пропорциональные 1г и Р (при этом учитывают, что Гг const, m, const (на его выходе получают сигнал, пропорциональный скольжению). Сигнал, пропорциональный току ротора получают с помощью схемы 14 сравнения как разность напряжений, отражающих величины и фазы намагничивающего тока и тока статора. Сигнал, пропорциональный потоку, получают путем интегрирования с помощью интегратора 10 сигнала, пропорционального ЭДС двигателя, снимаемого с измерительной обмотки 1-. Сигнал, пропорциональный току статора, имеют в виде падения напряжения на резисторе 7, включенном последовательно с рабочей обмоткой 4 асинхронного двигателя. Для получения сигнала, пропорционального электромагнитной мощности, используются три блока перемножения 17-19, на каждую пару входов которых поступают сигналы, пропорциональные ЭДС, снимаемые с измерительных обмоток 1-3 а, fg, Е, и токам ia, ij, ic, снимаемым с резисторов 7-9 соответствующих фаз двигателя. После суммирования полученных произведений в устройстве 20 в соответствии с выражением РЭМ iafa+ iel«+ ictc (2) получают сигнал, пропорциональный электромагнитной мощности. Устройство для измерения скольжения асинхронного двигателя работает следующим образом. С измерительных обмоток 1-3, оси которых совпадают с осями рабочих обмоток 4-6 статора асинхронного двигателя, снимаются сигналы, пропорциональные фазным ЭДС двигателя, которые поступают каждый на один-из входов трех блоков 17-19 перемножения. На вторые входы блоков 17- 19 пеоемножения поступают сигналы, пропорциональные токам статора, снимаемые с резисторов 7-9, включенных последовательно с рабочими обмотками 4-6 двигателя. На выходах блоков 17-19 перемножения получаем напряжения, пропорциональные фазным электромагнитным мощноетям. Все три напряжения содержат постоянную и переменную составляющие. Причем переменные составляющие мгновенных фаз ных мощностей сдвинуты друг относительно друга на угол . Учитывая симметрию обмоток статора 4-6 по фазам и выполняя измерительные обмотки 1-3 одинаковыми, имеют при суммировании этих трех сигналов в сумматоре 20 постоянный сигнал, уровень которого характеризует величину электромагнитной мощности, которая после преобразования (2) равна РЭМ laEa cos I§EjCosS « ЬЕсСозЧ-с, где IQ, Ig, Ic, EQ, Eg, EC - действующие значения фазных токов и ЭДС; %. f. fc - углы между соответствующими векторами токов и ЭДС. Этот сигнал через масштабный усилитель 13 в соответствии с (1) поступает в качестве делителя на блок 21 деления. Одновременно сигнал, пропорциональный ЭДС одной из фаз асинхронного двигателя и снимаемый с обмотки 1, поступает, на вход интегратора 10, с выхода которого в соответствии с выражением Je(t)dt /EmCoscotdl smajt снимают сигнал, пропорциональный магнитному потоку в воздушном зазоре двигателя. Здесь Ещ- амплитуда ЭДС C(t), Р - амплитуда магнитного потока; U)- частота; W - число витков дополнительной обмотки. Учитывая, что магнитный поток пропорционален намагничивающему току 1,сигнал с выхода интегратора 10, пропущенный через масштабный усилитель 11, можно использовать в качестве сигнала, пропорционального току намагничивания. Он поступает на суммирующий вход схемы 14 сравнения. На вычитающий вход схемы 14 сравнения поступает сигнал, пропорциональный ,току статора, который снимается с резистора 7 и проходит через масштабный усилитель 12. В результате, на выходе схемы 14 сравнения получают сигнал, пропорциональный току ротора, приведенного к цепи статора. Этот сигнал проходит через квадратор 15 и фильтр .16, необходимый для подавления переменной составляющей сигнала после возведения тока 1 в квадрат. Сигнал, пропорциональный квадрату тока ротора поступает в качестве делимого на блок 21 деления, с выхода которого в соответствии с () получают сигнал, пропорциональный скольжению асинхронного двигателя. С вы хода блока 21 деления он поступает на вход регистрирующего блока 22. В качестве интегратора 10, масштабных усилителей 11 -13, схемы 14 сравнения и сумматора 20 используются схемы, выполненные на операционных усилителях. Блоки 17-19 перемножения, квадратор 15, блок 21 деления выполнены также на операционных усилителях по известным схемам. На операционном усилителе выполнен и активный фильтр 16. В качестве регистрирующего блока 22 может быть использован прибор магнитоэлектрической системы, цифровой вольтметр и т.д., либо вход канала обратной связи, если устройство для измерения скольжения используется в системе автоматического регулирования скорости асинхронного двигателя в качестве датчика обратной связи. Настройка масщтабных усилителей 11 - 13 производится с помощью постоянного или синусоидального эталонных напряжений. Входное напряжение масштабного усилителя II должно в Kf раз превышать его выходное напряжение, где KI W fo/CifiH (хо - сопротивление намагничивающего контура двигателя, щ - .номинальная частота питающего напряжения, С 4, конструктивная постоянная двигателя). Входное напряжение масштабного усилителя 12 должно в R., раз превышать его выходное напряжение, где RI - сопротивление каждого из резисторов 7-9. Входное напряжение масштабного усилителя 13 должно в Кг раз превышать его выходное напряжение, где Kz m.,r2Wt/WR (V., - число витков фазной обмотки 4-6 статора двигателя). Применение предлагаемого устройства для регистрации скольжения асинхронного двигателя позволяет повысить точность измерения скольжения, так как измерение производится непосредственно с использованием переменных в фазных координатах без преобразования их к прямоугольным. Устройство вследствие этого становится более простым, требующим меньших затрат времени на его настройку. Следствием упрощения устройства является повышение его надежности. Применение измерительных обмоток 1-3 в статоре асинхронного двигателя, которые выполняются тонким проводом (это может быть виток, наклеенный на зубец статора двигателя) и не влияют на работу машины, исключают необходимость применения трансформаторов, которые используются в известном устройстве для получения сигналов, пропорциональных фазным напряжениям и токам статора. Это позволяет одновременно уменьшить габариты самого устройства для измерения скольжения. Наиболее эффективно применение предлагаемого устройства в. | ачестве датчика обратной связи по скольжению для оптимального управления в установивщихся и переходных режимах, компенсации изменения скорости

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения электромагнитного момента электродвигателя | 1980 |
|
SU883675A1 |
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1989 |
|
SU1645856A1 |
| Устройство для измерения скорости асинхронного двигателя | 1979 |
|
SU873127A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU838563A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1758823A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| Устройство для измерения скольженияАСиНХРОННОгО дВигАТЕля C фАзНыМ POTOPOM | 1979 |
|
SU824056A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
