Изобретение относится к плавучим устройствам для разработки месторождений полезных ископаемых и может быт использовано в горном деле и строительстве. Известна драга, включающая носовую хвостовую и средние плавучие секции, при этом хвостовая секция содержит две погруженные сваи, средняя установ лена в направляющих хвостовой секции и может поступательно в них перемещаться, а носовая шарнирно связана со средней с возможностью относительных угловых горизонтальных перемеще НИИ и имеет две сваи для маневрирования драгой в разрезе Недостатком драги является низкая и переменная жесткость связи между носовой и хвостовой секциями, что не обеспечивает одинакового эффективную разработку труднодрапируемых слоев россыпей при различной величине выдвижения средней секции относительно хвостовой.
(54) ДРАГА Наиболее близкой к предлагаемой по техт1ческой сущности является драга, включающая носовую, среднюю и хвостовую плавучие секции с onopiaiми сваями, несущие конструкции, добывающее устройсгво, состоящее из рабочего органа, установленного на раме, шарнирно присоединенной к несущей конструкции и механизм подьема, привод рабочего органа, отвалообра- зующее устройство, содержащее отвальный транспортер с несущей фермой, маневровое устройство с маневровыли сваями и механизм угловых горизонтапый1х перемещений драги в забое 2j, Недостатками известной драги является глейкая связь средней секции с хвостовой, отсутствие зажимов дешифрирующих устройств, регулируюпщх силу прижатия средней секции к носовой и применение погружных свай, относительно свободно перемещающихся в своих направляющих. Все это не позволяет драге вести эффективную разработку россыпей, так как повышает удепьную энергоемкость добычи.
Цель изобретения - повышение эффективности разработки россыпей путем снижения удельной энергоемкости добычи.
Поставленная цель достигается, тем что средняя секция шарнирно связана с хвостовой с возможностью относительных угловых горизонтальных перемещений, при этом средняя секция охватывает носовую, а хвостовая секция оборудована сваяьет для ее заякоривания.
Носовая секция закреплена к средней посредством зажимов демпфиру;ощих устройств, включающих пружины и амортизаторы, с возможностью относитель- горизонтальных перемещений в пределах шага установки черпаков на рабочем органе.
Амортизаторы вып.олнены с последовательно соединенными рабочими ступенями, а упругие элементы установлены параллельно с первыми и последовательно со следуюнр ми ступенями амортизаторов,при этом последние ступени амортизаторов выполнены в виде гидросистемы и гидравлических цилиндров 5 подпоршневая полость которых соединена со сливной и нагнетающей линиями соответствующей гидросистемы Зажимы снабжены системой регулирования силы прижатия.
Механизм подьема рамы рабочего органа выполнен в виде системы шарнирно соединенных тяг и гидроцилиндров , связывающих раму с несущей конструкцией носовой секции.
Привод рабочего органа снабжен ограничительно-разъединяющим устройством и датчиком нагрузки, установленный между носовой и средней секциями драги параллельно амортизаторам.
В качестве датчика нагрузки исползован датчик перемещений. Маневровые сваи смонтированы на средней секции и соединены с несущими конструкциями гидроцилиндрами, а механизм угловых перемещений связан с хвостовой секцией драги.
Механизм угловых перемещений включает систему шар.нирно соединенных тяг и гидроцилиндров с соответствующими приводами.
Сваи установлены в направляющих с -юдвижными и неподвижными зажимами с приводными устройствами.
Рама рабочего органа дополнительно закреплена предварительно напряженными растяжками, связывающими нижний конец рамы с несущими конструкциями носовой секции и закрепленными на ней соосно с верхним концом рамы.
С целью улучшения условий размещения свай хвостовой секции, отвальный транспортер выполнен с верхним расположениемфермы.
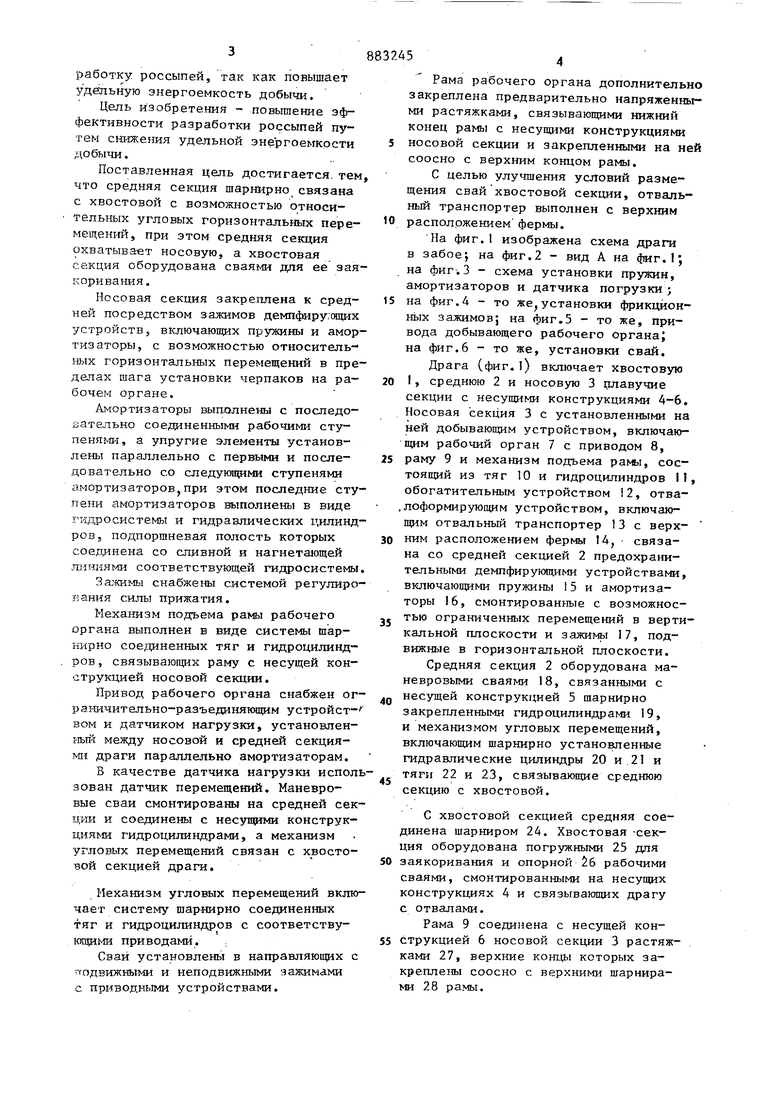
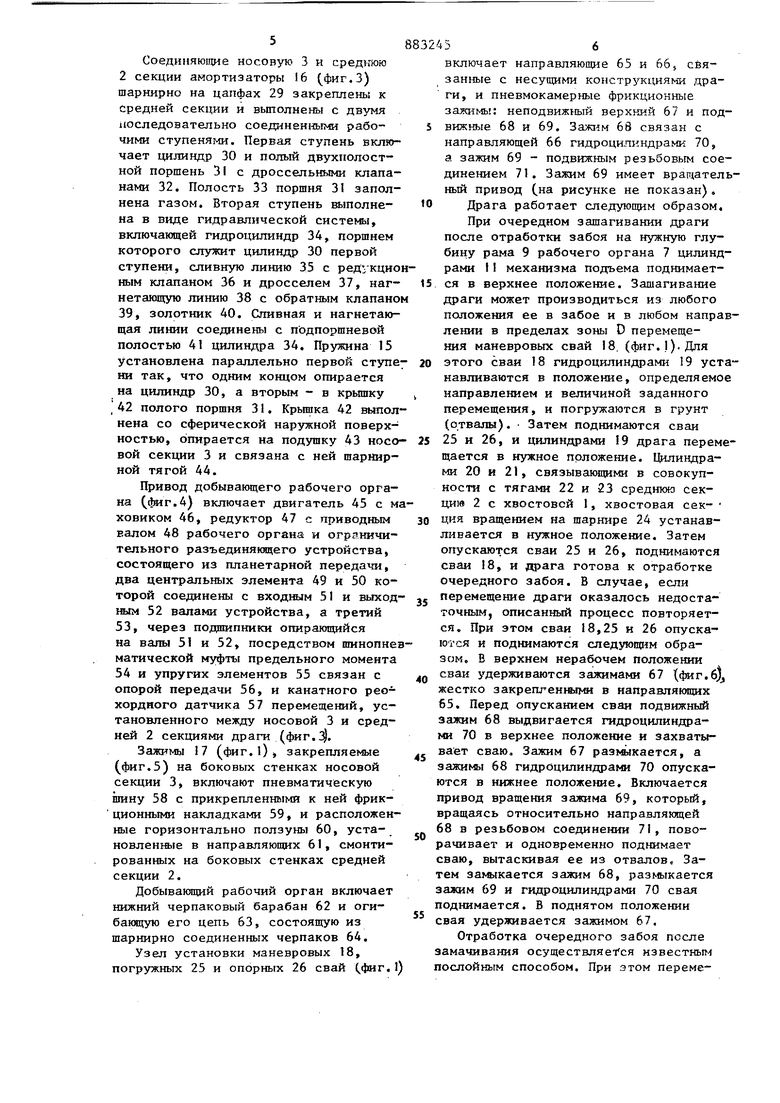
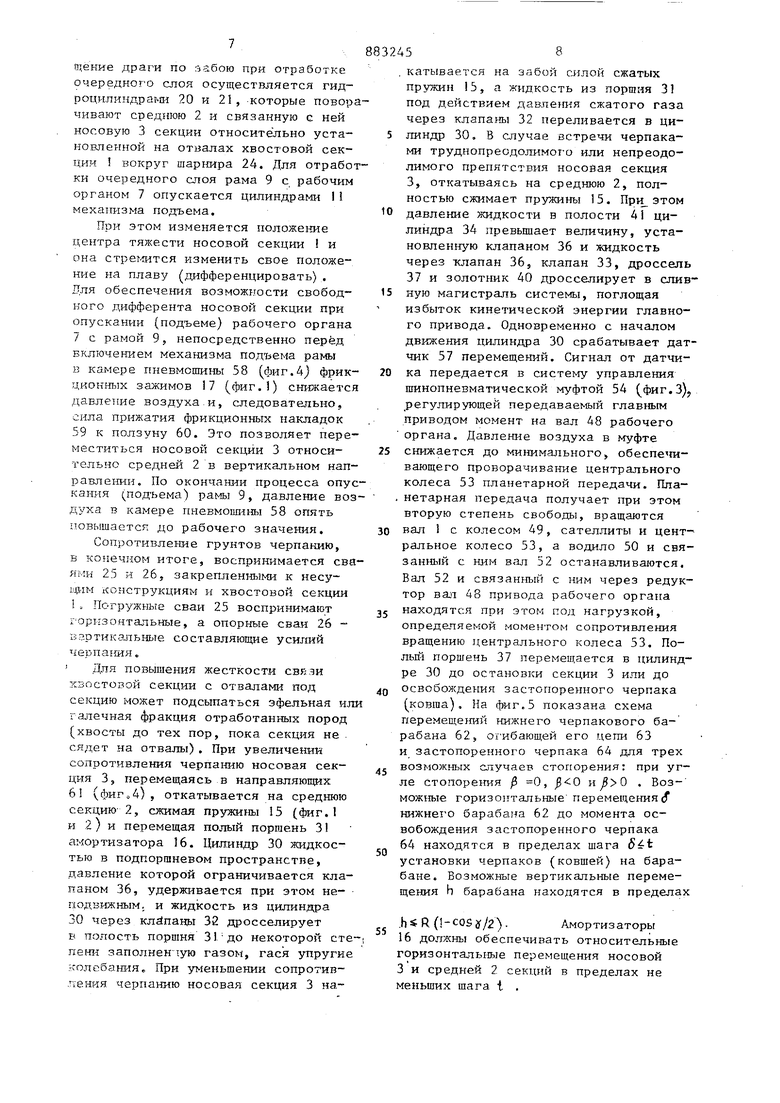
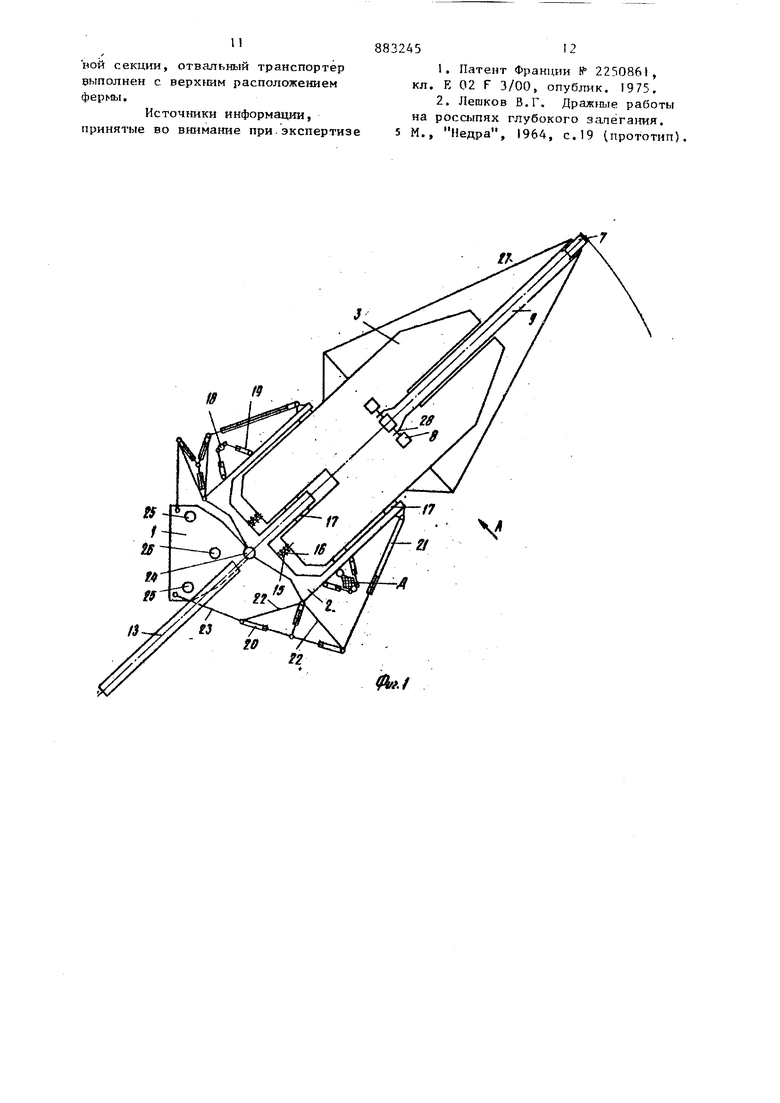
На фиг.1 изображена схема драги в забое; на фиг.2 - вид А на фиг.1; на фиг.З - схема установки пружин, амортизаторов и датчика погрузки ; 5 на фиг.4 - то же, установки фрикционНЬ1Х зажимов на фиг.5 - то же, привода добывающего рабочего opraHaJ на фиг.6 - то же, установки свай.
Драга (фиг.l) включает хвостовую I, среднюю 2 и носовую 3 цлавучие секции с несущими конструкциями 4-6. Носовая секция 3 с установленными на ней добывающим устройством, включающим рабочий орган 7 с приводом 8, раму 9 и механизм подъема рамы, состоящий из тяг 10 и гидроцилиндров II, обогатительным устройством 2, отва,лоформируюЕцим устройством, включающим отвальный транспортер 13 с верхним расположением фермы 14, связана со средней секцией 2 предохранительными демпфирующими устройствами, включающими пружины 15 и амортизаторы 16, смонтированные с возможностью ограниченных перемещений в вертикальной плоскости и зажимь 17, подвижные в горизонтальной плоскости.
Средняя секция 2 оборудована маневровыми сваями 18, связанными с несущей конструкцией 5 щарнирно закрепленными гидроцилиндрами 19, и механизмом угловых перемещений, включаюшлм щарнирно установленные гидравлические цилиндры 20 и,21 и тяги 22 и 23, связываю1щ е среднюю секцию с хвостовой.
С хвостовой секцией средняя соеинена шарниром 24. Хвостовая -секция оборудована погружными 25 для
заякоривания и опорной 26 рабочими сваями, смонтированными на несущих конструкциях 4 и связывающих драгу с отвалами.
Рама 9 соединена с несущей конструкцией 6 носовой секции 3 растяжками 27, верхние концы которых закреплены соосно с верхними щарнирами 28 рамы. Соединяющие носовую 3 и среднюю 2 секции амортизаторы 6 (фиг.З) шарнирно на цапфах 29 закреплень к средней секции и выполнены с двумя последовательно соединен1а Пчи рабочими ступеняг от. Первая ступень вклнг чает цилиндр 30 и полый двухиолостной поршень 31 с дроссельными клапанами 32. Полость 33 поршня 31 заполнена газом. Вторая ступень выполнена в виде гидравлической системы, включающей гидроцилиндр 34, поршнем которого служит цилиндр 30 первой ступени, сливную линию 35 с peдJ.кциo ным клапаном 36 и дросселем 37, нагнетающую линию 38 с обратным клапано 39, золотник 40. Сливная и нагнетающая линии соединены с подпоршневой полостью 41 цилиндра 34. Пружина 15 Установлена параллельно первой ступе ни так, что одним корщом опирается на цилиндр 30, а вторым - в крышку 42 полого поршня 31. Крьппка 42 выпол иена со сферической наружной поверхностью, опирается на подушку 43 носо вой секции 3 и связана с ней шарнирНОЙ тягой 44. Привод добывающего рабочего органа (йиг.4) включает двигатель 45 с м ховиком 46, редуктор 47 с приводным валом 48 рабочего органа и ограничительного разъединякицего устройства, состоящего из планетарной передачи, два центральных элемента 49 и 50 которой соединены с входным 51 и выход ным 52 валами устройства, а третий 53, через подшипники опирающийся на валы 51 и 52, посредством шинопне матической муфты предепьного момента 54 и упругих элементов 55 связан с опорой передачи 56, и канатного реохордного датчика 57 перемеще1шй, установленного между носовой 3 и средней 2 секциями драги (фиг. ;. Зажимы 17 (фиг. О, закрепляемые (фиг.5) на боковых стенках носовой секции 3, включают пневматическую шину 58 с прикрепленными к ней фрикционными накладками 59, и расположен ные горизонтально ползуны 60, установленш 1е в направляющих 61, смонтированных на боковых стенках средней секции 2. Добывающий рабочий орган включает нижний черпаковый барабан 62 и огибакяцую его цепь 63, состоящую из шарнирно соединенных черпаков 64. Узел установки маневровых 18, погружных 25 и опорных 26 свай (фиг. 56 включает направляющие 65 и 66, сёязанные с несущими конструкциями драги, и пневмокамерные фрикционные зажимы: неподвижный верхний 67 и подвижкые 68 и 69. Затаим 68 связан с направляющей 66 гидроцилиндрами 70, а зажим 69 - подвижным резьбовым сое динением 71. Зажим 69 имеет вращательный привод (на рисунке не показан). Драга работает следующим образом. При очередном зашагивании драги после отработки забоя на нужную глубину рама 9 рабочего органа 7 цилиндрами I1 механизма подъема поднимается в верхнее положение. Зашагивание драги может производиться из любого положения ее в забое и в любом направлении в пределах зоны D перемещения маневровых свай 18. (фиг.)). Для этого сваи 18 гидроцилиндрами 19 устанавливаются в положение, определяемое направлением и величиной заданного перемещения, и погружаются в грунт (отвалы). Затем поднимаются сваи 25 и 26, и цилиндрами 9 драга перемещается в нужное положение, пиндрами 20 и 21, связывающими в совокупности с тягами 22 и 23 среднюю секции 2 с хвостовой 1, хвостовая сек- ция вращением на шарнире 24 устанавливается в нужное положение. Затем опускаются сваи 25 и 26, поднимаются сваи 18, и драга готова к отработке очередного забоя. В случае, если перемещение драги оказалось недостаточным, описанный процесс повторяется. При этом сваи 18,25 и 26 опускаются и поднимаются следующим образом. В верхнем нерабочем положении сваи удерживаются зажимами 67 (4жг.б) жестко закреагенньгьм в направлякицих 65. Перед опусканием сваи подвижный зажим 68 выдвигается гндроцилиндрами 70 в верхнее положение и захватывает сваю. Зажим 67 размыкается, а зажимы 68 гидроцилиндрами 70 опускаются в нижнее положение. Включается привод вращения зажима 69, который, вращаясь относительно направляющей 68 в резьбовом соединении 71, повоачивает и одновременно поднимает сваю, вытаскивая ее из отвалов. Затем за1« 1кается зажим 68, размыкается зажим 69 и гидроцилиндрами 70 свая однимается. В поднятом положении свая удерживается зажимом 67. Отработка очередного забоя после амачивания осуществляемся известным ослойным способом. При этом перемещение драги по забою при отработке очередного слоя осуществляется гидpoцилиндpa и 20 и 21, -которые повор чивают среднюю 2 и связанную с ней носовую 3 секции относительно установленной на отвалах хвостовой секции вокруг шарнира 24. Для отрабо ки очередного слоя рама 9 с рабочим органом 7 опускается цилиндрами 11 механизма подъема. При этом изменяется положение центра тяжести носовой секции и она стретдатся изменить свое положение на плаву (дифференцировать) . Для обеспечения возможности свободного дифферента носовой секции при опускании (подъеме) рабочего органа 7 с рамой 9, непосредственно перёд Бключегтаем механизма подвема рамы в камере пневмоши -ш 58 (фиг.4) фрик ционных зажимов 7 (фиг.1) снижаетс давление воздуха.и, следовательно, сила прижатия фрикционных накладок 59 к ползуну 60. Это позволяет пере меститься носовой секции 3 относительно средней 2 в вертикальном нап равлении. По окончании процесса опу кания (подъема) рамы 9, давление во духа в камере пневмошины 58 опять п,овышается до рабочего значения. Сопротивление грунтов черпанию, в конечном итоге, воспринимается св ями 2 5 , закрепленными к несу1Ф1М конструкциям и хвостовой секции , Погружные сваи 25 воспринимают гюртгзоктальные, а опорные сваи 26 в -ртикальньте составляющие усилий 4epnai HH. Для повышения жесткости свк,зи хзостовой секции с отвалами под секцию может подсыпаться эфельная и гапечная фракция отработанных пород (хвосты до тех пор, пока секция не сядет на отвалы). При увеличении сопротивления черпанию носовая секция 3, перемещаясь в направляющих 61 (), откатывается на среднюю секцию 2, сжимая пружины 15 (фиг.1 и 2) и перемещая полый поршень 31 амортизатора 16. Цилиндр 30 жидкостью в подпоршневом пространстве давление которой ограничивается кла паном 36, удерживается при этом неподвижным, и жидкость из цилиндра 30 через клйпангы 32 дросселирует Е ПОЛОСТЬ поршня 31-ДО некоторой ст nemi заполненную газом, гася упруги колебания. При уменьшении сопротив-п:еш-1я черпанию носовая секция 3 на58катывается на забой силой сжатых пруткин 15, а жидкость из поршня 31 под действием дaвлe п Я сжатого газа через клапаны 32 переливается в цилиндр 30, В случае встречи черпаками труднопреодолимого или непреодолимого препятствия носовая секция 3, откатываясь на среднюю 2, полностью сжимает пружины 15. давление жидкости в полости 41 цилиндра 34 превьш1ает величину, установленную клапаном 36 и жидкость через -клапан 36, клапан 33, дроссель 37 и золотник 40 дросселирует в сливную магистраль системы, поглощая избыток кинетической энергии главного привода. Одновременно с началом движения цилиндра 30 срабатывает датчик 57 перемещений. Сигнал от датчика передается в систему управления шинопневматической муфтой 54 (фиг.З), регулирующей передаваемый главным приводом момент на вал 48 рабочего органа. Давление воздуха в муфте снижается до минимального, обеспвшвающего проворачивание центрального колеса 53 планетарной передачи. Планетарная передача получает при этом вторую степень свободы, вращаются вал 1 с колесом 49, сателлиты и центральное колесо 53, а водило 50 и связанный с ним вал 52 останавливаются. Вал 52 и связаннь Й с ним через редуктор вал 48 привода рабочего органа находятся при этом под нагрузкой, определяемой моментом сопротивления вращению центрального колеса 53. Полый поршень 37 перемещается в цилиндре 30 до остановки секции 3 или до освобождения застопоренного черпака (ковша). На фиг.5 показана схема перемещений нижнего черпакового барабана 62, огибающей его цепи 63 и застопоренного черпака 64 для трех ВОЗМОЖ1-1ЫХ случаев стопорения: при угле стопоре1тя 0, 0 . Возмож5ше горизонтальные перемещения(f нижнего барабана 62 до момента освобождения застопоренного черпака 64 находятся в пределах шага ( установки черпаков (ковшей) на барабане. Возможные вертикальные перемещения h барабана находятся в пределах .hstR(-coSif/2V Амортизаторы 16 должны обеспечивать относительные горизонтальные перемещения носовой 3 и средней 2 секций в пределах не меньших шага t , Вертикальные перемещения компен сируются упругими деформациями. В исходном положении носовая секция 3 возвращается давлением жидкости, поступающей из гидpocиcтe ьr через золотник 40, обратный клапан 39, отверстие 32 в подпоршневое простра ство цилиндра 30, и силой сжатия пружин 15. Шарнирное крепление цилиндра 34 цапфами 29 н сферический шарнир: наконечник 42 - подушка допускают возможность вертикальных относительных перемещений носовой 3 и средней 2 секций в ограниченных пределах (в пределах статических дифферентов). Внедрение предлагаемой драги позволит повысить эффективность разработки труднодрагируемых россыпей. Формула изобретения I. Драга, включающая носовую, сре нюю и хвостовую плавучие секции с опорными сваями, несущие конструкции, добывающее устройство, состояще из рабочего органа с черпаками установленного на раме, шарнирно присоединенной к несущей конструкции и механизм подъема, привод рабочего орга на, отвалоформирующее устройство, содержащее отвальный транспортер с несущей фермой, маневровое устройство с маневровыми сваями и механизм угловых горизонтальных перемещений драги в забое, отличающ ая с я тем, что, с целью повышения эффективности разработки россыпей, путем снижения удельной энергоемкости добычи, средняя секция шарнирно связана с хвостовой с возможность относительных угловых горизонтальных перемещений, при этом средняя секция охватывает носовую, а хвостовая СЕКЦИЯ оборудована сваями для ее заякоривания. 2.Драга поп.1, отличающаяся тем, что носовая секция закреплена к средней посредством зажимов и демпфирующих устройств, включающих пружины и амортизаторы, с возможностью относительных горизон тальных перемещений в пределах шага установки черпаков на рабочем органе 3.Драга по п.2, отличающаяся тем, что амортизаторы выполнены с последовательно соединен ными рабочими ступенями, а упругие элементы установлеш параллельно с первыми и последовательно со следующими ступенями амортизаторов, при этом последние ступени амортизаторов вьшолнены в виде гидросистемы и гидравлических цилиндров, подпоршне- вая полость которых соединена со сливной и нагнетающей линиями соответствующей гидpocиcтe ы. 4.Драга по п.2, отличающаяся тем, что зажимы снабжены системой регулирования силы прижатия. 5.Драга поп.1, отлич. ающ а я с я тем, что механизм подъема рамы рабочего органа выполнен в виде системы шарнирно соединенных тяг и гидроцилиндров, связывающий раму с несущей конструкцией носовой секции. 6.Драга поп.1, отличающаяся тем, что привод рабочего органа снабжен ограничительно-разъединяющим устройством и датчиком нагрузки, установленным между носовой и средней секциями драги параллельно амортизаторам. 7.Драга по. п.5, отличающаяся тем, что в качестве датчика нагрузки использован датчик перемещений. 8.Драга поп.1, отличающаяся тем, что маневровые сваи смонтированы на средней секции и соединены с нecya{и в конструкциями гидроцилиндров, а механизм угловых перемещений связан с хвостовой секцией драги. 9.Драга по п.7, отличающаяся тем, что механизм угловых перемещений включает систему шарнирно-соединенмлх тяг и гидроцшшндров с пpивoдa в. 10.Драга поп.1, отличающаяся ем, что сваи установлены в направляющих с подвижными и неподвижньt в{ зажимами с приводгшми устройствами. 11.Драга по п.}, отличающаяся TiaM, что рама рабочего органа дополнительно закреплена предварительно напряженными растяжками, связывающими нижний конец рамы с неутдакм конструкциями носовой секции закрепленньпШ на ней соосно с верхним концом рамы. 2. Драга поп.1, отличащая с я тем, что, с целью улучшеия условий размещения свай хвостовой секции, отвальный транспортер выполнен с верхним расположением фермы.
Источники информации, принятые во внимание при.экспертизе
8832А512
1.Патент Франции 2250861, кл. К 02 F 3/00, опублик. 1975.
2.Лешков В.Г, Дражные работы на РОСС1.1ПЯХ глубокого зааега1шя.
5 М., Недра, 1964, с.19 (прототип)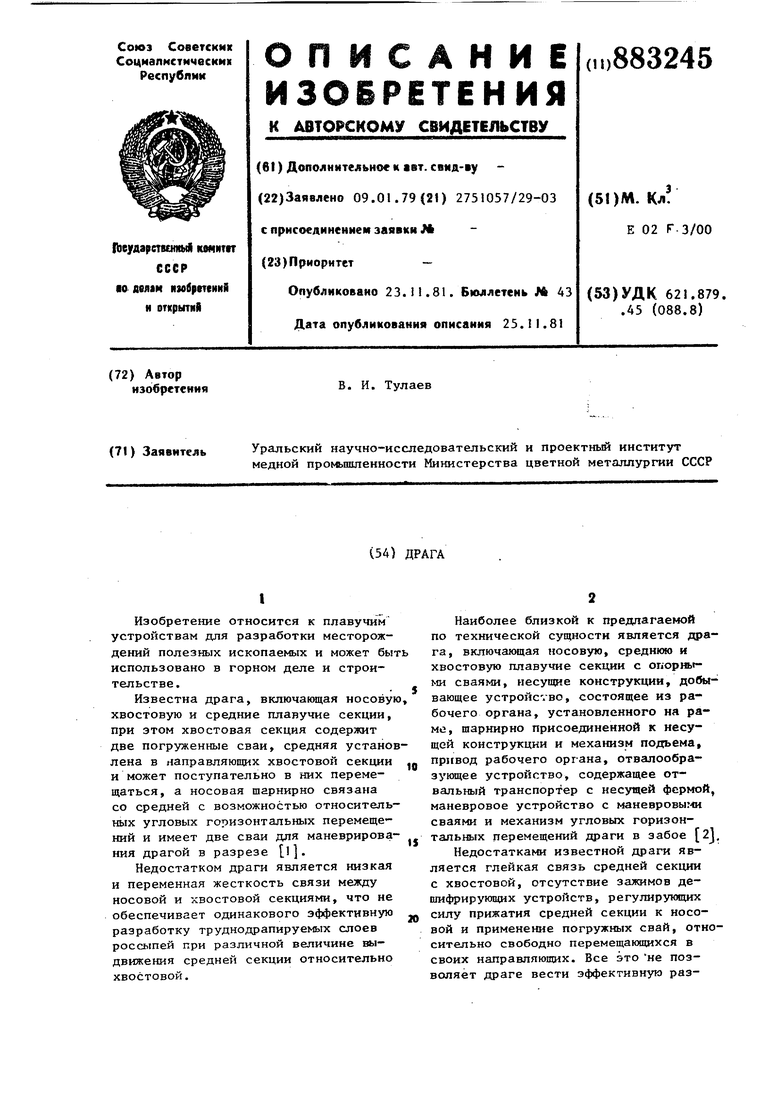

| название | год | авторы | номер документа |
|---|---|---|---|
| Черпающее устройство драги | 2020 |
|
RU2753784C1 |
| Драга | 2019 |
|
RU2732775C1 |
| СПОСОБ РАЗРАБОТКИ АЛМАЗОНОСНЫХ КИМБЕРЛИТОВЫХ ТРУБОК | 1994 |
|
RU2081321C1 |
| Способ дражной разработки техногенных запасов | 2019 |
|
RU2700152C1 |
| Способ разработки россыпных месторождений и добычной комплекс для его осуществления | 1985 |
|
SU1244320A1 |
| УСТАНОВКА ДЛЯ БЕТОНИРОВАНИЯ НАБИВНЫХ СВАЙ | 1998 |
|
RU2139978C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1991 |
|
RU2049859C1 |
| Способ управления электроприводом черпаковой цепи драги | 1979 |
|
SU1001403A1 |
| Машина для рытья котлованов | 1978 |
|
SU829794A1 |
| Устройство для отламывания оголовков железобетонных свай | 1978 |
|
SU747936A1 |



Фаг.З
8
