(54) СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЧЕРПАКОВОЙ ЦЕПИ ДРАГИ Изобретение огносится к электротехнике и может быть использовано при управлении привоаами механизмов, работающих на упор, например, при управлен процессом черпания на црагах и других землеройных машинах, отрабатывающих породы, содержащие крупные включения типа валунов. При встрече черпаковой цепи с крупным включением привод черпаковой цепи стопорится. Эффективность отработки пород при этом зависит от усилий, которы способен развить привод черпающего уст рей ства. Момент, развиваемый приводом .при стопорении, слагается из двух составляю щих: статического момента ( М J и цинамического ( M v H Статический момент определяется механической характеристикой привоца, т.е. он вполне опрецелен и однозначно зависит от параметров настройки привода. Динамический момент, развиваемый приводом при встрече с крупным включением (стопорении), определяется параметр рами привода (кинематической схемой, маковыми i массами) и интенсивностью стопорения, которая зависит от начальной скорС сти стопорения, податливости пре- цятствия и жесткости закрепления сваи, драги в породе. Жесткость закрепления сваи в породе, в свою очередь, зависит от глубины погружения сваи и в ряце случаев от характера подстилающих пород. Наиболее характерен случай, когда в начале отработки забоя свая погружена в эфельный отвал на небольшую глубину и под воздействием внешних сил может в нем перемещаться, а по мере отработки забоя глубина погружения сваи увеличивается в результате подсыпки эфель- ной фракции, и возможность перемещения ее уменьшается,Наибольшие динамические усилия при стопорении возникают при столкновении черпаков с препятствием абсолютной жесткости, а спая попадает 310 в рясщелину скальных пород и не имеет возможности свободного перемещения, Таким образом, динамический момент (МДцц) привода черпаковой цепи произвольно меняется в довольно широких пределах .и не может управляться операторо Во всем диапазоне рабочих скоросте статический момент упора устанавливают из расчета, чтобы он в сумме с максимально возможным динамическим моментом не превышал величины допустимого момента ()« Малая эффективность способа преодоления препятствия черпаковой цепью из за стопорных режимов ее привода объяс няется тем, что суммарное стопорное усилие часто оказывается меньшим, чем (еслц препятствие обладает податливостью), а также тем, что максималь. но возможное усилие MAQ,, должно быть приложено к рабочему органу в течение некоторого времени, а динамическая составляющая после остановки привода как Только ускорение привода станет равным нулю исчезает. Если препятствие не преодолено, его отделяют путем отработки окружающих пород, на что тратится от минут до часа и более. Известен способ управления электроприводом черпаковой цепи, согласно которому в кинематическую схему привода черпаковой цепи вводят муфту предельного момента (шйнопневматическую), ограничивающую сумму статического и динамического моментов привода допустимой величиной. При достаточно резком стопоре нии черпаковой цепи к препятствию, бызвавшему стопорение, прикладывается усилие, соответствующее допустимому по условиям прочности исполнительного органа (черпаковой цепи) 1, . Недостаток такого способа связан с тем, что пршшадываемое к препятствию усилие только ограничивается по величи- не, но его нельзя создать по желанию оператора на необходимое время. Поэтом способ хотя и позволяет предотвратить поломки элементов привода, но не может быть эффективно использован при отработке валуносодержащих пород. Известенспособ управления приводом черпаковой цепи, при котором скорость привода регулируют по систем® постоянной мощности (электродвигатели постоянного тока, скорости оторых регулируется путем изменения тока возбуждения). По мере повьшения скорости снижается статический момент, соответствующий ОЗ4 одному и тому же якорному току цвига- теля. Стопорная ветвь механической характеристики привода формир)уется путем токоограничения с постоянной ставкой по току. Поэтому в стопорном режиме более высоким начальным скоростям стопорения соответствует меньший статический момент, но больший динамический (пропорционально начальной скорости стопорения) и наоборот 2 Т . Недостаток данного способа заключается в том, что суммарное усилие, воздействующее на препятствие, не регулируется оператором ни по величине, ни по длительности воздействия, поскольку динамический момент усилия сгопорения носит случайный карактер в зависимости от податливости препятствия и в ряде случаев может быть ниже М Наиболее близок к предлагаемому способ управления электроприводом черпаковой цепи драги при отработке валуносодержащих россыпей, при котором измеряют нагрузку электропривода, сравнивают ее с заданной и при превышении нагрузкой электропривода заданного значения снижают скорость вращения электропривода до полной его остановки, а заданную нагрузку корректируют в зависимости от величины начальной скорости стопорения электропривода | 3 . При использовании известного способа применительно к приводу дражной очерпаковой цепи обеспечивается предотвращение возникновения усилий, превьпдаюших Мдо| , однако не полностью используются прочностные возможности рабочего органа при преодолении препятствий. По мере снижения заданной скорости привода увеличивает уставку статического стопорного момента, что способствует рещению этой задачи, но уставка всегда выбирается из условия сложения статического момента и динамического, возникающего при столкновении с препятствием минимальной податливости. Реальные стопорения чаше происходят с препятствиями, податливости которых существенно больше. Цель изобретения - повьщ ение производительности драги путем наиболее полного использования прочностных возможностей элементов черпаковой цепи при преодолении препятствия. Указанная цель достигается тем, что согласно способу управления электроприводом черпаковой цепи драги при отработке валуносодержащих россыпей, при котором измеряют нагрузку привода, сравнивают ее с зааанной и при превышении нагрузкой привода заданного значения снижают скорость электропривода до его полной остановки, а заданную нагрузку корректируют в зависимости or величины начальной скорости стопорения электропривода, после полной остановки электропривода при Ьтопорении осуществляют выдержку времени, равную времени снижения максимально возможных динамических усилий стопорения до нуля, статический момент привода увеличивают до значения максимально допустимого момента, а после того, как привод начнет набирать скорость при преодолении препятствия, статический момент уменьшают до его исходного значения.
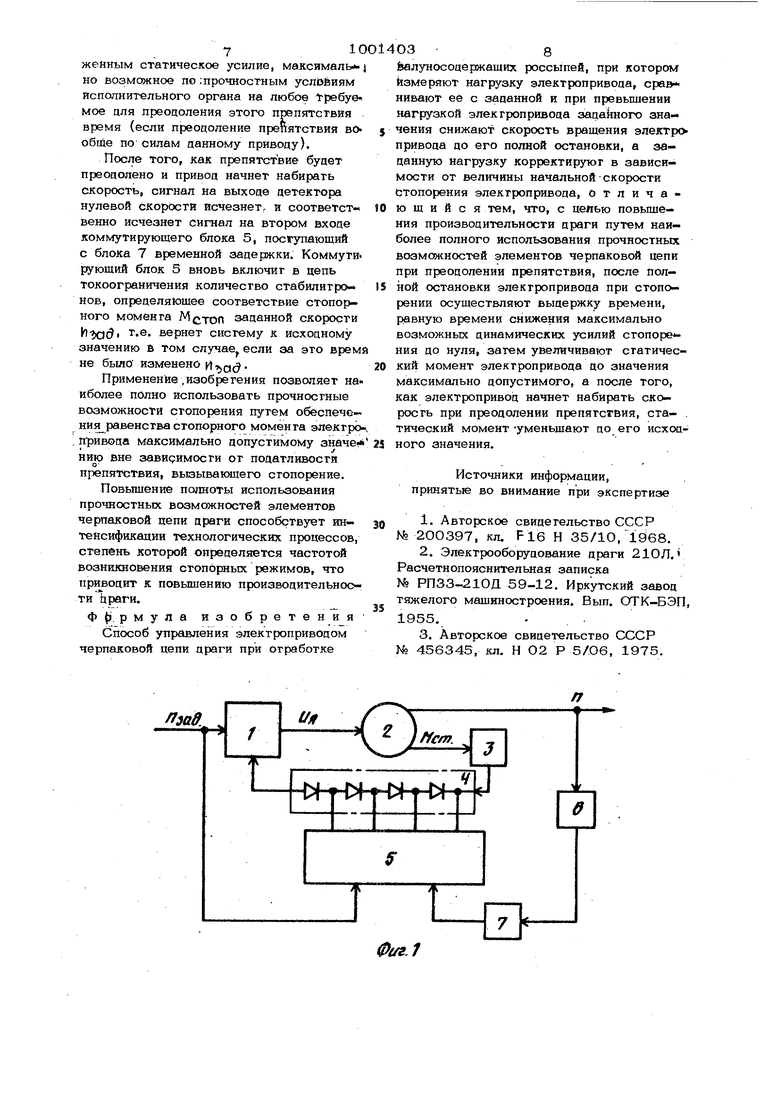
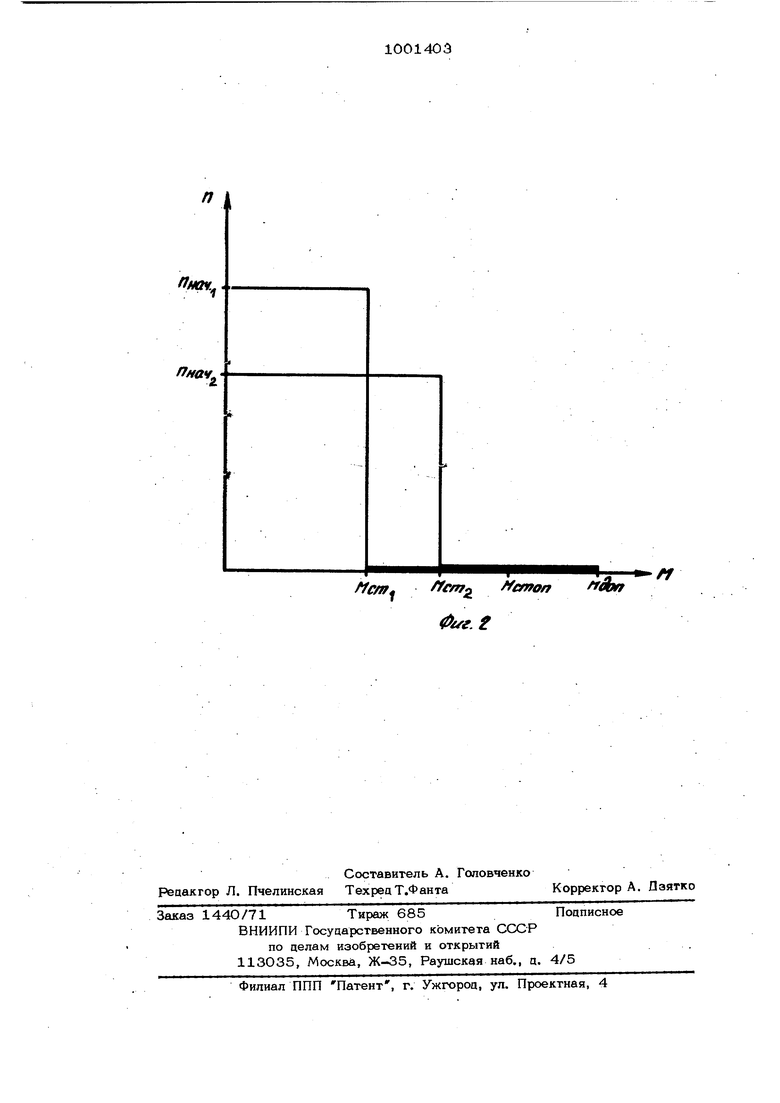
На фиг. 1 изображена принципиальная схема устройства, реализующего способ управления электроприводом.черпаковой цепи драги, на фиг. 2 - механические характеристики электропривода.
На один вхоц регулятора 1 напряжени подается сигнал задания скорости привода И ,о . Выходное напряжение регулятора 1К1 подается на электродвигатель 2 постоянного тока привода черпаковой цепи драги. Нагрузка электропривода измеряется блоком 23, и измеренный сигнал подается на пороговый узел 4 контура токоограничения, где осуществляется сравнение измеренного значения нагрузки с заданным. Выход порогового узла 4 соединен со вторым входом регулятора 1 напряжения для снижения его выходного напряжения при превышении измеренным значением нагрузки заданного. На Управляющие входы порогового узла поступает вь1ходной сигнал коммутирующего блока 5. Коммутирующий блок Имеет два входа: на один подается сигна заданной скорости Х)5,о(Л , на второй сигнал с выхода детектора 6 нулевой скорости, пропущенный через блок 7 временной задержки.
Пороговое устройство 4 выполнено из последовательно включенных стабилитронов и имеет столько входов, сколько стабилитронов оно в себя включает. Количество стабилитронов зависит от того, на сколько интервалов по соображениям точности регулирования разбит диапазон изменения заданной нагрузки двигателя при изменении заданного значения скорости И э,п( В принципе пороговое устройство может быть и не дискретным а непрерывным (при использовании функциональных устройств), реализующим функцию, определяемую огибающей, проходящей через точки перегиба механических характеристик (фиг. 2). Эти точки имеют координаты: У1 ц,, , М-ч-,. и
иА. M-t-i( ц
наЧ,2. .
Коммутирующий блок является обычны
программным блоком.
Начальной скоростью . Р стопорении является заданная приводу скорость, т.е. И ц . ц .vihcm И&
Способ реализуется следующим образом. I .-
Оператор устанавливает требуемое значение скорости привода черпаковой цепи И (3 Сигнал поступает на первый вход коммутирующего устройства 5, которое корректирует заданное значение нагрузки привода , включая в цель токоограничения требуемое количество стабилитрхэнов (формирование механическс характеристики со стопорным моментом соответствующим И 50(5 ).
При встрече исполнительного органа с препятствием момент привода М растет, сигнал нагрузки превышает соответствующую величину М-,а и- на вход регулятора 1 напряжения по цепи токоограничения поступает разностный сигнал между измеренным значением нагрузки и заданным, вследствие чего выходное напряжение- регулятора 1 и скорость двигателя 2 снижаются цо нуля. В момен остановки двигателя к исполнительному органу приложены статический момент двигателя MJN-J- и динамический момент , соответствующий накопленной маховыми массами кинетической энергий. Последний момент приложен кратковременно. Максимальное время приложения его ТГ определяется расчетом или экспериментально. На это время настраивается блок 7 временной задержки. В результате действия суммы статического и динамического моментов препятствие в процессе стопорения при.вода может быть преодолено и тогда нагрузка двигателя уменьшится, выходной сигнал блока 3 станет меньше заданного (определенного порого вым значением узла 4), и двигатель повысит скорость до И 7,0(5. Если указанной суммы усилий не хватило для .преодоления препятствия (а сумма эта как правило меньше Мдоп )i то на вход коммутирующего блока 5 через время Т поступает сигнал с выхода детекторе 6 нулевой скорости, и коммутирующий бпок 5 путем включения в цепь токоограниче- имя соответствующего количпсгва стабилитронов устанавливает М этом к препятствию ок.чзы(шотся приложенным статическое усилие, максималь- но возможное по:прочностным усльбиям исполнительного органа на любое гребуе мое цля преодоления этого препятствия время (если преодоление препятствия во o6iue по силам данному приводу). После того, как препятствие будет преодолено и привод начнет набирать скорость, сигнал на выходе детектора нулевой скорости исчезнет, и соответственно исчезнет сигнал на втором входе коммутирующего блока 5, посгупающий с блока 7 временной задержки, Коммутируюший блок 5 вновь включит в цепь токоограничения количество стабилитронов, определяющее соответствие стопорного момента Мс.топ заданной скорости tiOdt Тб. вернет систему к исходному значению В том случае если за это врем не было изменено и,ci(j. Применение .изобретения позволяет наиболее полно использовать прочностные возможности стопорения путем обеспечения равенствастопорного момента электро . привода максимально допустимому значению вне зависимости от податливости препятствия, вызываквдего стопорение. Повьпиение полноты использования прочностных возможностей элементов черпаковой цепи драги способствует интенсификации технологических процессов, степень которой определяется частотой возникновения стопорных режимов, что приводит к повыщению производительности Ьраги. Ф рмуЛа изобретения Способ управления электроприводом черпаковой цепи драги при отработке балуносодержащих россыпей, при котором измеряют нагрузку электропривода, срав нивают её с заданной и при превышении нагрузкой электропривода заданного значения снижают скорость вращения электропривода до его полной остановки, а заданную нагрузку корректируют в зависимости от величины начальной скорости Стопорения электропривода, о т л и ч а ю ш и и с я тем, что, с цепью повьпцения производительности драги путем наиболее полного использования прочностных возможностей элементов черпаковой цепи при преодолении препятствия, после полной остановки электропривода при стопорении осуществляют выдержку времени, равную времени снижения максимально возможных динамических усилий стопорения до нуля, затем увеличивают статический момент электропривода до значения максимально допустимого, а после того, как электропривод начнет набирать скорость при преодолении препятствия, ста- . тический момент -уменьщают до его исходного значения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР №200397, кл. F16 Н 35/1О,1968. 2.Электрооборудование драги 210Л. V Расчетнопояснительная записка № РПЗЗ-210Д 59-12. Иркутский завод тяжелого машиностроения. Вып. ОТК-БЭП, 1955.... 3.Авторское свидетельство СССР № 456345, кл. Н О2 Р 5/06, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом драгирования | 1982 |
|
SU1071709A1 |
| Способ защиты от перегрузки "электропривода по системе" управляемый преобразователь-двигатель | 1969 |
|
SU456345A1 |
| Способ автоматического управления процессом черпания многочерпаковых драг | 1974 |
|
SU723040A1 |
| Электропривод черпаковой цепи драги | 1980 |
|
SU861481A1 |
| Способ автоматического управления процессом драгирования и устройство для его осуществления | 1981 |
|
SU968196A1 |
| Способ управления процессом драгирования | 1983 |
|
SU1105556A1 |
| Драга | 1979 |
|
SU883245A1 |
| Устройство управления добычным комплексом драги | 1979 |
|
SU876862A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Электропривод для механизма с циклической импульсной нагрузкой | 1981 |
|
SU1001408A1 |
с/я fffm стоп воп 0иг.
