(54) СПОСОБ СТАТИЧЕСКОЙ БАЛАПСИРОВКИ ИЗДЕЛИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2010 |
|
RU2426082C1 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 1991 |
|
RU2025680C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2456566C1 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2460052C1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛОЧНОЙ ОБРАБОТКИ | 1998 |
|
RU2140841C1 |
| Устройство для уравновешивания изделий | 1978 |
|
SU763711A1 |
| Способ балансировки гибкого ротора с распределенной неуравновешенностью | 1956 |
|
SU114957A1 |
1
Изобретение относится к статической балансировке изделий и может использоваться в различных областях техники.
Известен способ статической балансировки, основанный на определении углового положения центра тяжести массы и ее момента неуравновешенности и установке уравновешивающего груза на продолжении линии, соединяющей центр тяжести массы с ее осью вращения, используемый в конструкции 1.
Однако известный способ может быть реализован только путем проведения статической балансировки на специальном стенде и требует в ряде случаев разборки изделия.
Цель изобретения - обеспечение балансировки изделия, поворачивающегося вокруг горизонтальной оси при одновременном вращении части его вокруг оси, пересекающей горизонтальную ось перпендикулярно ей, без сооружения стенда и без разборки изделия.
Поставленная цель достигается тем, что в способе статической балансировки изделия основанном на определении углового положения центра тяжести массы и ее момента
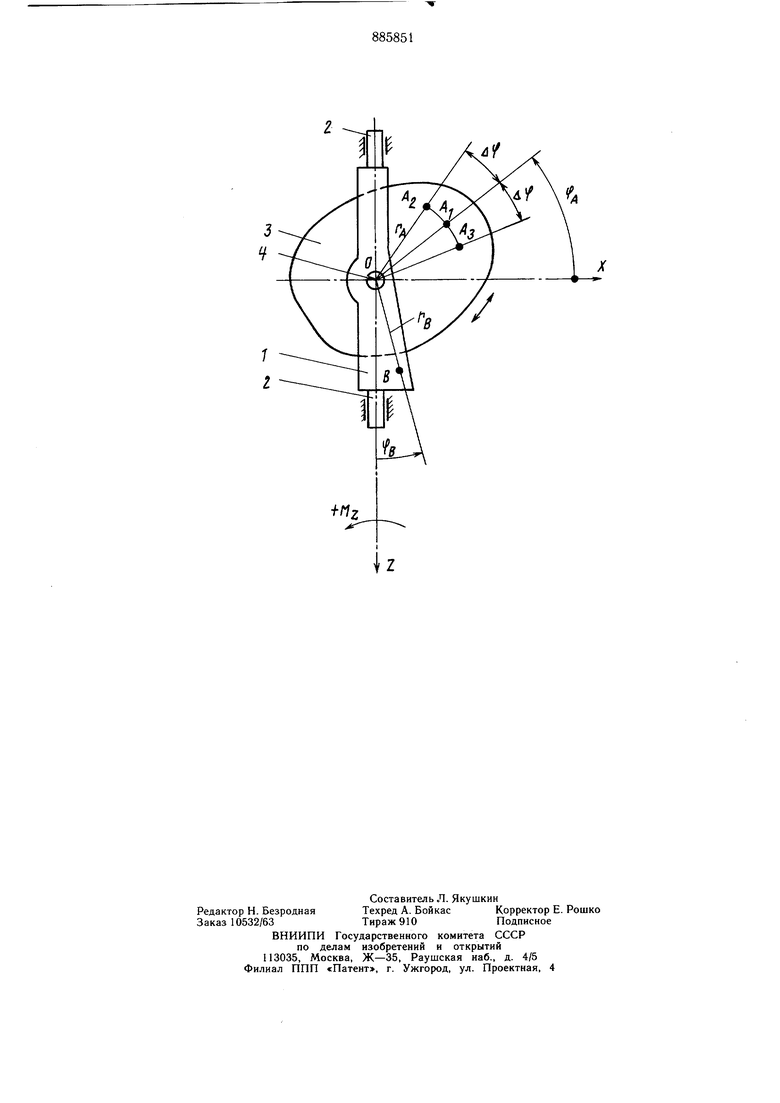
неуравновешенности и установке уравновещивающего груза на продолжении линии, соединяющей центр тяжести массы с ее осью вращения, ось вращения вращающейся части устанавливают вертикально, измеряют момент неуравновешенности изделия вокруг горизонтальной оси в трех положениях вращающейся части, одно из которых отстоит от двух других на равные углы, по их значениям определяют угловое положение центра тяжести вращающейся части и моменты неуравновешенности вращающейся части и остальной части изделия и уравновещивают каждую из указанных частей изделия. На чертеже представлено балансируемое изделие в положении балансировки, когда ось вращения вращающейся части установлена вертикально, вид сверху.
Изделие 1 может поворачиваться вокруг горизонтальной оси 2 при одновременном вращении части 3 изделия вокруг оси вращения 4, пересекающей горизонтальную ось 2 перпендикулярно ей. Для осуществления предлагаемого способа ось вращения 4 вращающейся части 3 устанавливают вертикально и измеряют момент неуравновещенности Мд, Mj и MZS изделия относительно горизонтальной оси 2 в трех положениях вращающейся части 3, одно из которых отстоит от двух других на равные углы Acfi. Полученные значения моментов неуравновешенности М.2,, Mza и Мгз связаны с координатами центров тяжестей частей изделия следующими соотнощениями MZ) GAIX созфА + GB TB sinqjg ,(1) Gf,(((f) + GBrgSincpB)(2) ОдГдС05((у -Aq.) + ,(3) где Gy - вес вращающейся части изделия; Gg-вес остальной части изделия; г - расстояние от центра тяжести А вращающейся части изделия до оси ее вращения, совпадающей с началом координат 0; fg - расстояние от центра тяжести В остальной части изделия до начала координат; ср - угол, соответствующий среднему (в процессе измеренной) положению центра тяжести А вращающейся части изделия, относительно одной из осей координат; ср - угол, соответствующий положению центра тяжести В остальной части изделия относительно одной из осей координат; угол поворота вращающейся части в процессе измерений относительно ее среднего положения. Если обозначить момент неуравновещенности вращающейся части изделия через MZA а остальной части через М2.., причем Мгл ОдГд(4) Mzfc (5) то уравнения (1) ... (3) примут вид ( Мгдсозфд + MzeSinq ;(6) jMj. Мгдсоз(срд+ Дер) + MzBsin(pe.(7) Шгь MZACOS (рд Л ср + MzBsin(pe (8/, Система трех уравнений (6) ... (8) позволяет получить три определяемых величины Mib и . Рещение можно представить в следующем виде Мгъ MZI 2sm()sinMZB MZI -MZA со8(д ; r. A 2 ) Для определения угла (Уд из (11) необходимо иметь заранее рассчитанные значения функции ) t/ro -. ±i;ii 2. , )- sinCv-) По найденным значениям величин моментов неуравновешенности (M. - для вращающейся части изделия, f. - лля остальног; части изделия) и угловому положению д центра тяжести вращающейся часги изделия уравновешивают каждую из указанных частей изделия. Формула изобретения Способ статической балансировки изделия, основанный на определении углового положения центра тяжести массы и ее момента неуравновешенности и установке уравновешивающего груза на продолй ении линии, соединяющей центр тяжести массы с ее осью вращения, отличающийся тем, что, с целью обеспечения балансировки изделия, поворачивающегося вокруг горизонтальной оси при одновременном вращении части его вокруг оси, пересекающей горизонтальную ось перпендикулярно ей, ось вращения вращающейся части устанавливают вертикально, измеряют момент неуравновещенности изделия относительно горизонтальной оси в трех положениях вращающейся части, одно из которых отстоит от двух других на равные углы, по-их значениям определяют угловое положение центра тяжести вращающейся части и моменты неуравновешенности вращающейся части и остальной части изделия, и уравновещквают каждую из указанных частей изделия. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 354307, кл. G 01 М 1/12, 1972 (прототип).
/
