(5) ИЗМЕРИТЕЛЬ КООРДИНАТЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| РАНГОВЫЙ АДАПТИВНЫЙ ПОСЛЕДОВАТЕЛЬНЫЙ ОБНАРУЖИТЕЛЬ СИГНАЛОВ | 1996 |
|
RU2100822C1 |
| УСТРОЙСТВО ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ | 1982 |
|
SU1090136A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ПРОТЯЖЕННОГО ОБЪЕКТА | 1992 |
|
RU2078352C1 |
| Устройство задания больших перемещений рабочего органа машины по направляющей | 1988 |
|
SU1695271A1 |
| Устройство обработки угломерных сигналов | 1983 |
|
SU1146615A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВОЙ КООРДИНАТЫ СИСТЕМЫ ПОСАДКИ | 1990 |
|
SU1760868A1 |
| Способ определения координат движущегося источника излучения пассивным гидролокатором | 2023 |
|
RU2801675C1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1991 |
|
RU2018869C1 |
| СПОСОБ ДЕМОДУЛЯЦИИ СИГНАЛОВ С ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МОДУЛЯЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2271071C2 |
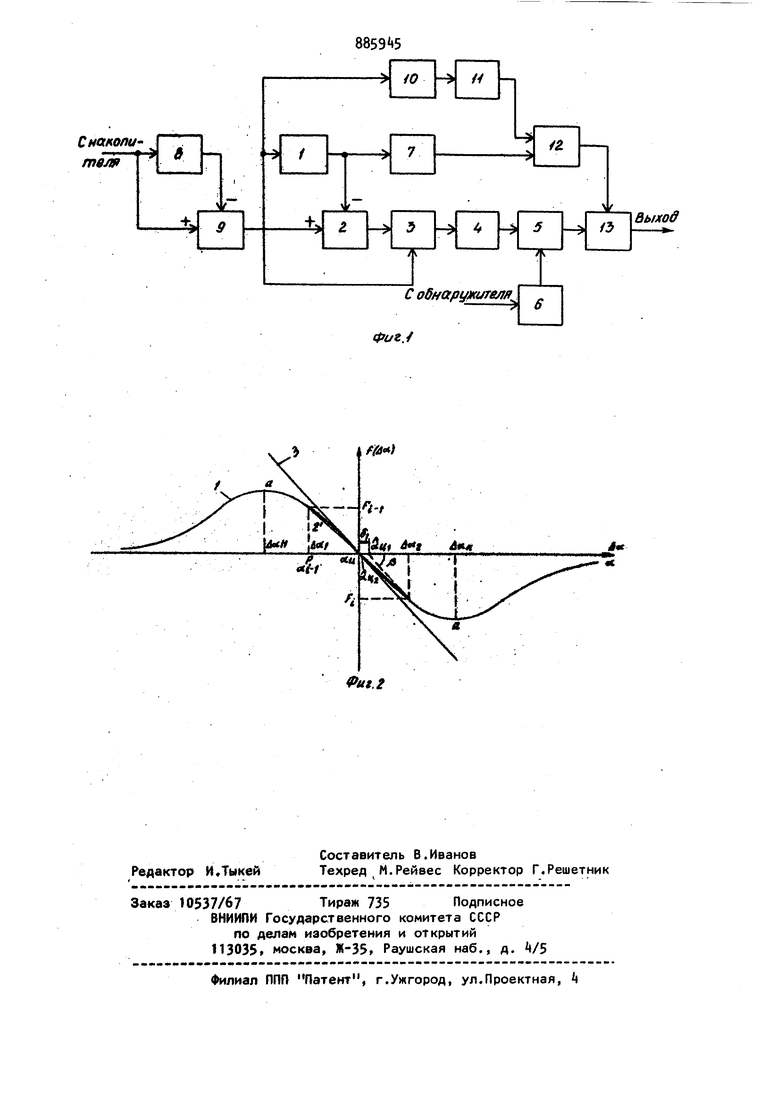
Изобретение относится к радиотехни ке и может использоваться в обзорных радиолокационных станциях для измерения одной из координат цели: азимута, угла места или дальности. Известен измеритель координаты, содержащий последовательно включенные первый блок памяти, первый блок вычитания, блок деления, весовой блок и сумматор, второй вход которого соединен с выходом блока считывания координаты 1 J. Однако известное устройство имеет низкую точность измерения, так как ложные отсчеты в нескольких направлениях при пеленге мощных а также имеет низкую точность определения смещения равносигнального направления относительно направления на цель. Цель изобретения - увеличение точности измерения. Поставленная цель достигается тем, что в измеритель координаты, содержасмежныхцелей щии последовательно включенные первый блок памяти, первый блок вычитания, блок деления, весовой блок и сумматор, второй вход которого соединен с выходом блока считывания координаты, введены первый компаратор и последовательно включенные второй блок памяти, второй блок вычитания, второй компаратор, инвертор, элемент И и блок стробирования, при этом вход блока памяти соединен с вторым входом второго блока вычитания, выход которого соединен с входом первого блока памяти и вторыми входами первого блока вычитания и блока деления, а выход первого блока памяти соединен с вторым входом элемента И через первый компаратор. На фиг. 1 приведена структурная электрическая схема предлагаемого устройства} ;на фиг. 2 - кривые, поясняющие процесс получения отсчетов координаты. Измеритель.координаты содержит первый блок 1 памяти, первый блок 2 вычитания, блок 3 деления, весовой, блок , сумматор 5, блок 6 считывани координаты, первый компаратор 7, вто рой блок 8 памяти, второй блок 9 вычитания, второй компаратор 10, инвертор 11, элемент И 12 и блок 13 стробирования. Измеритель координаты работает следующим образом. На вход второго блока 8 памяти поступают сигналы, накопленные в накопителе (не показан) в каждом положении луча диаграммы направленности - при электронном сканировании или за смежные интервалы времени, равные половине длительности пакета при механическом сканировании. Первый и второй блоки 1 и 8 памяти осуществляют задержку сигналов на перио их поступления на вход измерителя. 1а выходе второго блока 9 вычитания образуется разность между текущим и прерыдущим значениями входного сигна ла, т.е. формируется текущая первая разность входного сигнала, которая поступает на вход первого блока 1 памяти и первый вход (вход уменьшаемого) первого блока 2 вычитания. На выходе первого блока 2 вычитания пол чается разность текущего и предыдуще го значений первой разности, т.е. формируется вторая разность входного сигнала. В блоке 3 деления осуществл ется нормирование первой разности на значение второй разности. Нормирован ная первая разность поступает на весовой блок 4, коэффициент передачи которого определяется шириной диаграммы направленности и шагом сканиро вания. Сигнал на выходе весового бло ка 4 является оценкой смещения равно сигнального направления относительно направления на цель. Значение равносигналь.ного направления снимается с блока б считывания координаты при поступлении на этот блок сигнала об обнаружении цели с обнаружителя (не показан) и равно среднему значению двух последних положений антенного луча, относительно которых получена текущая первая разность. В сумматоре 5 формируется оценка координаты цели как сумма значений равно сигнального направления и оценки смещения этого направления относительно направления на цель. Получен. . 4 ная таким образом оценка координаты цели поступаетна вход блока 13 стробирования и проходит через него на выход измерителя только в том случае, если текущее значение первой разности является величиной отрицательной, а. предыдущее значение первой разности --величиной положительной. Для проверки выполнения данного условия текущее значение первой разности с выхода второго блока 9 вычитания подается на второй компаратор 10, а предыдущее значение первой разности с выхода первого блока 1 памяти подается на первый компаратор 7. В перBdM и втором компараторах 7 и 10 значения первой разности сравниваются с нулем. Если текущее значение первой разности отрицательно, а предыдущее значение этой разности - положительно, то на выходах первого и второго компараторов 7 и 10 будут соответственно логические ноль и единица. В этом с выхода элемен-та И 12 на блок 13 стробирования выдается сигнал, разрешающий прохождение на выход измерителя оценки, полученной на выходе сумматора 5. Так , как при дискрете перемещения равносигнального направления, равным половине длительности пакета, используемое условие относительно текущего и предыдущего значений первой разности выполняется только один раз в пределах рабочего участка дискриминационной характеристики (фиг. 2), то вне зависимости от мощности си|- нала цели, на выходе измерителя будет иметь место всего один отсчет оценки координаты цели. Таким образом, в предлагаемом измерителе устраняются грубые промахи - оценки координаты цели, получаемые за пределами рабочего участка дискриминационной характеристики, что увеличивает среднюю точность измерения. Повышение точности оценивания смещения до равносигнального направления относительно направления на цель в предложенном устройстве по сравнению с известным обусловлено следующим. В предла :; аемом устройстве оценка координаты определяется как положение на координатной оси точки пересечения с этой осью прямой, проведенной через две точки с координатами ((1,F) и (, ) (прямая 2 на фиг. 2). Здесь F и -л соответственно текущее и предыдущее значения сигнала на выходе второго блока 9 вычитания. Если рассматривать сигнал на выходе второго блока 9 вычитания как функцию f (Aoi) смещения А характер изменения этой функции совпадает с поведением дискриминационной характеристики известного измерителя (кривая 1 на фиг.2) а F; и F являютcя значениями f (Ло(.) в точках , соответственно. Как видно на фиг. 2 угол наклона прямой 3 изменяется в зависимости от величины рассогласова ния А0(., стремясь при этом скомпенсировать нелинейность функции f(uo) что уменьшает ошибку измерения значения До -Повышение точности измерени в предлагаемом устройстве обусловлено также уменьшением влияния флюктуа ции входного сигнала. В известном устройстве оценка смещения Доб производится по одному отсчету дискриминатора, в то время как в предлагаемом - по двум отсчетам, что соответс вует фильтарции отсчетов дискриминатора, уменьшающей флюктуационную ошибку измерения. Предлагаемое устройство может быт использовано или для измерения одной из угловых координат цели или для измерения дальности до цели. В последнем случае на вход измерителя пос тупают сигналы, накопленные в отдель ных элементах дальности. Элементы дальности формируются при временной дискретизации принимаемого процесса с интервалом дискретизации, равным половине эквивалентной длительности излученного сигнала. Возможность использования предлагаемого устройства для измерения дальности основана на следующих соответствиях величин и понятий, используемых при изме5рении уголовых координат и дальности. Огибающей пакета импульсов по угловой координате соответствует огибающая накопленного сигнала по дальности, накоплению в смежных положениях. луча диаграммы направленности соот.ветствует накопление в смежных точках дальности. Опорное значение дальности, относительно которого находится точное положение цели, определяется как среднее значение положений двух соседних точек дальности, что соответствует определению равноси - нального направления при измерении угловой координаты. Формула изобретения Измеритель координаты, содержащий последовательно включенные первый блок памяти, первый блок вычитания, блок деления, весовой блок и сумматор, второй вход которого соединен с выходом блока считывания координаты, отличающийся тем, что, с целью увеличения точности измерения, введены первый компаратор и последовательно включенные второй блок памяти, второй блок вычитания, второй компаратор, инвертор, элемент И и блок стробирования, при этом вход блока памяти соединен с вторым входом второго блока вычитания, выход которого соединен с входом первого блока памяти и вторыми входами первого блока вычитания и блока деления, а выход первого блока памяти соединен с вторым входо элемента И через первый компаратор. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 578631 , кл. G 01 S 3/1, G 01 S 7/30, опублик 30.10.77 (прототип). СнпмпиФиг. Выход
