{
1
(21)4422204/24 (22) 0.6.05.88 (46)30.11.91. Бюл. №44
(71)Московский авиационный институт им.Серго Орджоникидзе
(72)В.Е.Мельников, К.М.Лукомский и Е.Н.Мельникова
(53)62-50(088.8)
(56)Авторское свидетельство СССР №432468, кл. G 05 D 3/00, 1976.
Авторское свидетельство СССР № 278352, кл. G 05 D 3/00 1964
(54)УСТРОЙСТВО ЗАДАНИЯ БОЛЬШИХ ПЕРЕМЕЩЕНИЙ РАБОЧЕГО ОРГАНА МАШИНЫ ПО НАПРАВЛЯЮЩЕЙ
(57)Изобретение относится к точному машиностроению, в частности, для решения задач позиционирования рабочих органов механизмов, имеющих направляющие. Цель изобретения - повышение точности перемещения рабочего органа Цель достигается за счет применения в качестве измерителя положения обнуляемого прецизионного измерителя малых линейных перемещений и дискретного перемещения рабочего органа по направляющей. При каждом шаге перемещения, кроме последнего, производится определение условного нуля измерителя малых перемещений, перемещение рабочего органа на величину, не превышающую предела измерения измери- теяя, остановка рабочего органа, определение истинного перемещения на текущем шаге как разности показаний измерителя малых перемещений в момент остановки и значения условного нуля, суммирование истинного значения перемещения на текущем шаге с суммой предыдущих значений истинных перемещений и обнуление измерителя малых перемещений. Перемещение рабочего органа на последнем шаге контролируется по разности заданного смещения и суммарного смещения рабочего органа на предыдущих шагах, 2 ил.
сл
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического контроля больших интегральных схем | 1986 |
|
SU1529220A1 |
| ЦИФРОВОЙ ДАЛЬНОМЕР | 1992 |
|
RU2069003C1 |
| Цифровой измеритель симметричных составляющих | 1985 |
|
SU1255964A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ПЕРЕМЕЩЕНИЯ СКЛАДСКИХ ГРУЗОВЫХ ПЛАТФОРМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569812C1 |
| Измеритель характеристик аналого- цифРОВыХ пРЕОбРАзОВАТЕлЕй | 1978 |
|
SU819950A1 |
| УСТРОЙСТВО АНАЛОГО-ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ | 1992 |
|
RU2042269C1 |
| ИНТЕРПОЛИРУЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ВРЕМЯ-КОД | 2008 |
|
RU2385479C2 |
| УСТРОЙСТВО ДОПУСКОВОГО КОНТРОЛЯ ПЕРЕХОДНОГО ОТКЛОНЕНИЯ ЧАСТОТЫ | 2022 |
|
RU2793860C1 |
| Устройство для счета движущихся предметов | 1985 |
|
SU1259309A1 |
| РАДИОВЫСОТОМЕР | 2001 |
|
RU2212684C1 |
Изобретение относится к точному машиностроению и предназначено для решения задач прецизионного позиционирования или регулирования положения рабочих органов различных машин и механизмов, име- ющих направляющие перемещения (движения) рабочих органов.
Цель изобретения - повышение точности задания перемещения.
Сущность изобретения заключается в том, что при задании больших перемещений рабочего органа машины по направляющей предварительно производится фиксация
(измерение) начального положения рабочего органа относительно направляющей, в качестве измерителя положения используется прецизионный измеритель малых линейных перемещений, диапазон измерения которого не менее чем на порядок меньше наибольшего перемещения рабочего органа перемещения рабочего органа по направляющей осуществляется дискретно, причем шаг дискретного перемещения устанавливается предварительно произвольным, но не превышающим измерения прецизионного измерителя малых перемещений, начало
о о ел го
VJ
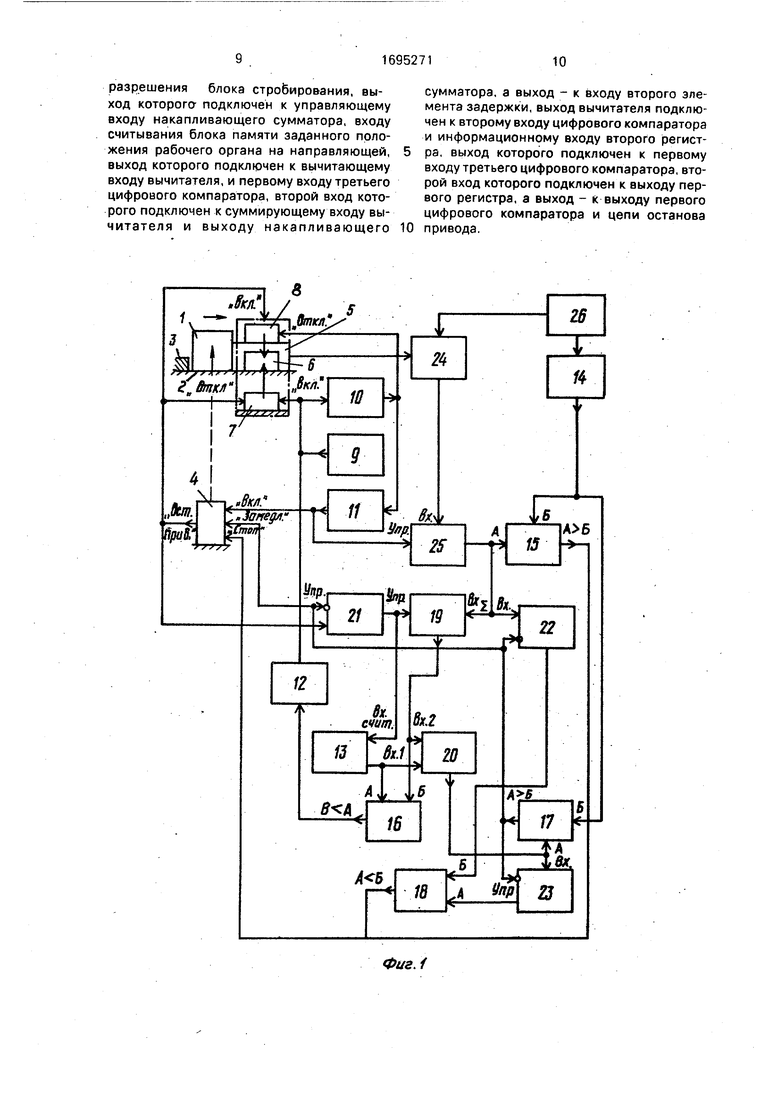
и окончание каждого шага перемещения фиксируется с помощью измерителя, контроль текущего положения рабочего органа осуществляется путем суммирования перемещений на предыдущих шагах и сравнении текущего перемещения с заданным, а движение рабочего органа на последнем шаге производится со скоростью по крайней мере на порядок меньшей средней скорости движения на всех предыдущих шагах, На фиг. 1 представлена структурная схема устройства; на фиг. 2 - конструктивная схема прецизионного измерителя малых перемещений.
Устройство для задания больших перемещений рабочего органа машины по направляющей содержит собственно сам рабочий орган 1, имеющий возможность перемещаться по направляющей 2 от своего некоторого начального исходного положения, устанавливаемого упором 3. Движение рабочего органа 1 задается приводом 4, снабженным сигнализатором остановки привода (не показан), а также имеющим цепи включения (Вкл,), замедления скорости движения (Замедл.) и остачовки (Стоп) привода. На рабочем органе 1 вдоль направ- ляющей установлен прецизионный измеритель малых перемещений, диапазон измерения которого не менее чем на поря- док меньше диапазона поясного перемещения рабочего органа и который содержит статор 5 и кинематически связанный с ним ротор 6, снабженный фиксатором 7 положения ротора на направляющей. Статор 5 несет на себе арретир 8 ротора относительно статора. Устройство содержит также блок 9 запуска, три элемента 10-12 задержки, блок 13 памяти положения и блок памяти заданного шага 14, четыре цифровых компаратора 15-18, накапливающий сумматор 19, вычитатель 20, блок стробирования 21, два регистра 22 и 23, преобразователь 24 аналог-код, вход которого подключен к статору 5 прецизионного измерителя малых перемещений, блок 25 вычитания и блок 26 синхронизации. Управляющая цепь блока 9 запуска и выход третьего элемента 12 задержки подключены к цепи Вкл. фиксатора 7 и входу первого элемента 10 задержки, выход которого подключен к цепи Откл. арретира 8 и входу второго элемента 11 задержки. Выход элемента 11 задержки подключен к цепи Вкл. привода 4 и управляющему входу блока 25, вход которого соединен с выходом преобразователя 24 аналог-код, а выход - с суммирующим входом накапливающего сумматора 19, выходом первого регистра 22 и входом А первого цифрового компаратора 15 Второй вход
компаратора 15 так же, как и аналогичный вход третьего компаратора 17 подключены к выходу блока 14 памяти заданного шага, Выход компаратора 15 соединен с выходом
четвертого компаратора 18, которые подключены к цепи Стоп привода 4. Второй выход компаратора 17, а также вход второго регистра 23 подключены к выходу вычитате- ля 20, первый вход которого вместе с пер0 вым входом второго компаратора 16 подключены к выходу блока 13 памяти положения, а второй вход вмссте со вторым входом компаратора 16 подключены к выходу накапливающего сумматора 19 Управляю5 щий вход накапливающего сумматора 19 и вход считывания блока 13 подключены к выходу блока 21 стробирования, Управляющие входы регистров 22 и 23,€лок& 21 стробиро0 вания и цепи Замедл. привода 4 подключены к выходу компаратора 17, Выходы регистров 22 и 23 подключены к входам Б и А компаратора 18, выход которого подключен к входной цепи элемента 12 задержки
В Цепь Ост,прив. привода 4 подключена к входу блока 21 стробирования, к цепи Откл фиксатора 7 и цепи Вкл арретира 8,
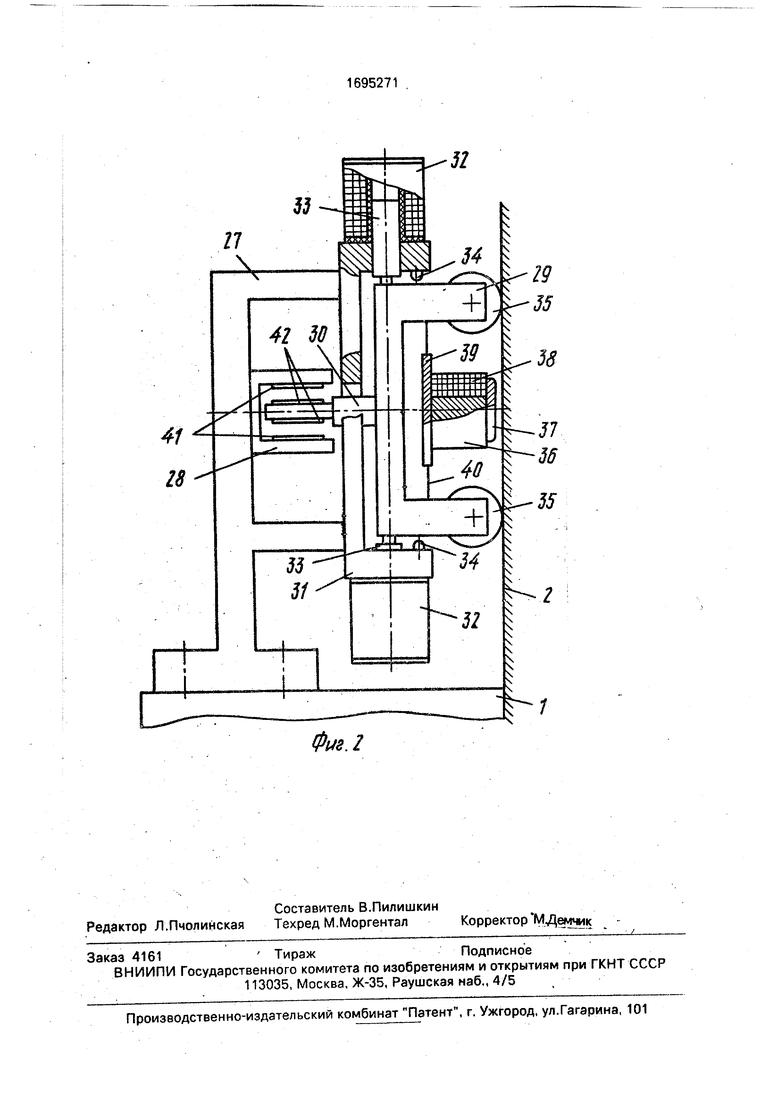
На фиг. 2 представлен один из возможных вариантов конструкции прецизионного
0 измерителя малых перемещений, который содержит кронштейн 27, жестко закрепленный на рабочем органе 1 и несущий на себе статорную часть 28 емкостного преобра- зоватепй перемещений и основание 29,
5 несу-иее роторную часть 30 этого преобразователя. Кронштейн 27 снабжен электромагнитным арретиром 31, имеющим катушки 32. Сердечники 33 арретира жестко соединены с основанием 29 и проходят со
0 скольжением через отверстия в кронштейне арретира 31. Для регулировки исходного взаимного положения основания 29 и кронштейна 27 (нуля емкостного преобразователя перемещения) предусмотрены
5 регулируемые (винтовые) упоры 34. Основание 29 может перемещаться по направляющей на роликах 35. Фиксатор 36 положения ротора на направляющей выполнен в виде сердечника 37 с намотанной на нем катуш0 кой 38 и закрепленного на жестком центре 39 мембраны 40. Электроды 41 и электроды #2 образуют дифференциальный емкостный датчик прецизионного преобразователя перемещений.
5 Устройство задания больших перемещений рабочего органа машины по направляющей работает следующим образом.
В исходном положении рабочий орган 1 прижат к упору 3, задающему нулевой уровень (базу), от которого задается и отсчитывается перемещение рабочего органа 1 по
направляющей 2. При включении питания устройства все его блоки приводятся блоком 26 синхронизации в исходное состояние. В блоке 14 памяти заданного шага записан (или записывается) цифровой код сигнала, соответствующего значению несколько меньшему, чем диапазон измерения прецизионного измерителя малых перемещений (например, 0,75-0,9отдиапа- зона). В блоке 13 памяти положения записан (или записывается) цифровой код, соответствующий требуемому (задаваемому) положению (расстоянию) рабочего органа 1 от упора 3. При включении оператором блока 9 запуска осуществляется кратковременная подача напряжения питания в цепь включения (Вкл.) фиксатора 7 положения ротора 6 на направляющей, через элемент 10 задержки в цепь отключения (Откл.) арретира 8 ротора относительно статора, через первый и второй элементы 10 и 11 задержки в цепь включения (Вкл.)привода 4. Дли фиксации соответствующих состояний элементов 7 и 8 в цепях Вкл. и Откл. в конструкции измерителя малых перемещений предусмотрены блокировки по питанию этих цепей, например, на поляризованных реле. Тем же импульсом напряжения, что и в цепи включения привода 4 осуществляется приведение к исходному уровню блока 25 вычитания таким образом, что первое хе значение кода с преобразователя 24 принимается за нулевое. Таким образом, к моменту трогания рабочего органа 1 по направляющей 2 ротор 6 измерителя малых перемещений оказывается жестко сцеплен с направляющей 2 (например, за счет притяжения фиксатора 36 в конструкции измерителя по фиг. 2) и освобожден от сцепления (жесткой связи) со статором 5 (обе катушки 32 обесточены). Исходный сигнал с измерителя малых перемещений, пройдя преобразователь 24, записывается в блоке 25 в качестве начала отсчета измерительных ма- лых перемещений.
В процессе движения рабочего органа происходит изменение взаимного положения ротора б и статора 5 (изменение зазора между электродами 41 и 42 емкостного пре- образователя). В течение такта, задаваемого блоком 26 синхронизации, происходит формирование разностного сигнала в блоке 25 вычитания и подача его на вход А первого цифрового компаратора 15 и входы первого регистра 22 и накапливающего сумматора 19, а также считывание кода из блока 14 памяти задзного шага и его подача на входы Б цифровых компараторов 15 и 17. Так как сигналы на управляющих входах блоков 19, 22 и 23 отсутствуют, изменения состояния
этих блоков не происходит, а в блоках 15 и 17 осуществляется сравнение кодов с входов А и Б. Как только цифровое значение с блока 25 вычитания на входе А компаратора 15 превысит значение, записанное в блок 14 на входе Б, на выходе компаратора 15 появится импульс напряжения. Этим импульсом в цепи остановки (Стоп) привода 4 прекращается движение рабочего органа по направляющей. В момент остановки привода сигнализатор остановки привода вырабатывает сигнал, поступающий в цепи включения (Вкл.) арретира ротора относительно статора и в цепь отключения (Откл.) фиксатора ротора на направляющей, а гэк- же на вход блока 21 стробирования. Последний вырабатывает управляющий импульс, поступающий ка управляющий вход накапливающего сумматора 19, в котором происходит суммирование цифрового кода, имеющегося на выходе блока 25 вычитания. Кроме того, управляющий импульс с блока 21 обеспечивает считывание кода, записанного в блок 13 памяти положения. Таким образом, на входы вычитателя 20 и второго цифрового компаратора 16 поступают цифровые коды с блоков 13 и 19. Разность кодов с вычитатепя 20 поступает на вход А третьего цифрового компаратора 17 и вход второго ре гистра 23.До тех порлока разность между нием координаты заданного положения и значением текущей координаты рабочего органа на направляющей больше, 4eN рабочий диапазон измерителя малых перемещений, состояние блоков 17, 18, 22 и 23 не изменяется. В то же время на выходе цифрового компаратора 16 появляется импульс, который через третий элемент задержки 12 приводит измеритель малых перемещений в исходное состояние для начала следующего цикла перемещения рабочего органа по направляющей с малым шагом, т.е. происходит фиксация ротора 6 на направляющей 2, разретирование ротора относительно статора 5, включение привода 4 и приведение блока 25 вычитания в исходное состояние. Таким образом импульсом с блока 16 осуществляется повторный запуск всего устройства, но уже не I. ператором от схемы запуска, а автоматически и весь описанный цикл работы устройства повторяется многократно. Но как только путь, пройденный рабочим органом по направляющей, достигнет значения, при котором разность кодов на выходе блока 20 становится меньше кода, записанного в блок 14 памяти заданного шага, вся схема переходит в новое состояние, соответствующее последнему, заключительному шагу перемещения рабочего органа В этом слуае в конце предыдущего (предпоследнего) икла разность кодов с вычитателя 20 окаывается меньше, чем код, считываемый из лока 14 памяти заданного шага и третий ифровой компаратор 17 выдает по выходу )Б уровень напряжения, который поступат на управляющие входы регистров 22 и 23, лока 21 стробирования, а также в цепь замедления (Замедл.) работы привода 4. В результате схема стробирования оказывается заблокированной и перестает выдавать управляющий импульс на сумматор 19, В то же время регистры 22 и 23 разблокируются и с их выходов на входы цифрового компаратора 18 поступают соответствующие коды, а на его выходе появляется импульс напряжения в цепи остановки привода (Стоп). Однако в связи с тем, что привод уже остановлен, никаких изменений в схеме не происходит. Таким образом, в конце предпоследнего шага измерения происходит переключение привода на замедление и блокировка работы накапливающего сумматора 19. Поступивший с блока 16 импульс (через элемент задержки 12), производит запуск устройства на последний, замедленный шаг перемещения рабочего органа по направляющей. Последовательно происходит фиксация ротора б измерителя малых перемещений на направляющей 2, освобождение ротора 6 от жесткой связи со статором 5, приведение блока 25 вычитания в исходное положение и включение привода с относительно малой скоростью. В это время на выходе вычитателя 20 остается та же разность кодов, что и в предпоследнем цикле работы устройства и, таким образом, посредством блока 17 поддерживается блокировка блока 21 стробирования и открытое состояние регистров 22 и 23. В каждом такте в блоке 25 текущее значение кода с его выхода поступает на вход А блока 15 и на вход первого регистра 22. Так как рабочий орган перемещается на последнем шаге, не превышающем значения записанного в блок 14 памяти заданного шага, то блок 15 по выхо- ду уже сработать не может. В компараторе 18 происходит сравнение кодов - кода. соответствующего остатку пути рабочего органа (коду, поступившему на вход А с вычитателя 20 через регистр 23) и кода, соответствующего текущему значению координаты рабочего органа на последнем шаге (коду, поступившему на вход Б с блока 25 вычитания через регистр 22). Срабатывание компаратора 18 происходит в момент прохождения рабочего органа с малой скоростью через заданное положение (записанное в блоке 13 памяти положения, что приводит к окончательной останоёке привода.
Формула изобретения Устройство задания больших перемещений рабочего органа машины по направляющей, содержащее привод с цепями
включения и остановки, измеритель положения рабочего органа, содержащий ротор и статор, отличающееся тем, что, с целью повышения точности задания перемещения, в него дополнительно введены
0 блок запуска, первый, второй и третий элементы задержки, блок памяти заданного шага, блок памяти положения рабочего органа на направляющей, первый, второй, третий и четвертый цифровые компараторы,
5 накапливающий сумматор, вычитатель, блок стробирования, первый и второй регистры, преобразователь аналог-код, блок синхронизации и блок вычитания, причем привод дополнительно снабжен сишализа0 тором остановки и цепью замедления, а измеритель положения рабочего органа выполнен в виде прецизионного измерителя малых перемещений с диапазоном измерения не менее, чем на порядок меньшим
5 полного перемещения рабочего органа, жестко соединенного со статором измерителя, связанного с арретиром ротора, а ротор измерителя связан с фиксатором положения ротора на направляющей, выход измерите0 ля положения рабочего органа подключен к информационному входу преобразователя аналог-код, к тактирующему входу которого подключен первый выход блока синхронизации, а к выходу - информационный вход
5 блока вычитания, выход которого подключен к информационным входам накапливающего сумматора и первого регистра и к первому входу первого цифрового компаратора, а управляющий вход - к выходу перво0 го элемента задержки и к цепи включения привода, цепь замедления которого соединена с тактирующими входами первого и второго регистров, с входом запирания блока стробирования и с выходом второго циф5 рового компаратора, первый вход которого подключен к второму входу первого цифрового компаратора и к выходу блока памяти заданного шага, вход считывания которого подключен к второму выходу блока сиихро0 низации, выход блока запуска подключен к цепи включения фиксатора положения ротора на направляющей, к выходу второго элемента задержки и к входу третьего элемента задержки, выход которого подключен к
5 входу первого элемента задержки и к цепи отключения арретира ротора, сигнализатор остановки привода подключен к цепи включения фиксатора положений ротора на направляющей, к цепм включения арретира ротора и входу
разрешения блока стробирования, выход которого- подключен к управляющему входу накапливающего сумматора, входу считывания блока памяти заданного положения рабочего органа на направляющей, выход которого подключен к вычитающему входу вычитателя, и первому входу третьего цифрового компаратора, второй вход которого подключен к суммирующему входу вычитателя и выходу накапливающего
сумматора, а выход - к входу второго элемента задержки, выход вычитателя подключен к второму входу цифрового компаратора и информационному входу второго регистра, выход которого подключен к первому входу третьего цифрового компаратора, второй вход которого подключен к выходу первого регистра, а выход - к выходу первого цифрового компаратора и цепи останова привода.
Фиг.1
Фм.2
29
