Предлагаемое изобретение относится к области гидроакустики и может быть использовано в пассивной гидролокации в ближней зоне излучения источника с круговым (сферическим, цилиндрическим) волновым фронтом (зоне Френеля), с бортовыми разнесенными и протяженными антеннами, буксируемыми и стационарными, а также в атмосферной акустике и пассивной радиолокации.
Для пассивного определения двух, или, в общем случае трех координат источника излучения - направления α и дальности D, в ближней зоне его поля, используют широкоапертурные приемные системы (ПС) из М разнесенных в пространстве антенн, М≥3, расположенных известным образом, а также протяженные антенны большого волнового размера. Средства предварительной обработки, включающей усиление сигналов приемников антенн, преобразование в частотную область, меж-антенную пространственно-временную обработку информации (МА ПВО), обеспечивают двухкоординатный обзор в заданном секторе направлений α и интервале дальностей D на индикаторе С координатной сеткой <α, D> [Гампер Л.Е. Оптимальная пространственно-временная обработка в системах пассивной гидролокации с разнесенными антеннами // Научно-техн. сб. Гидроакустика. Вып. 10 СПб., 2009. С. 49-60] и наблюдение «полезного» сигнала источника излучения S в виде «сигнальной отметки» (СО), обусловленной «откликом» ПС на его сигнал на фоне выбросов помехи, с «главным» максимумом, обеспечивающим считывание искомых координат источника излучения αS, DS на шкалах α, D [Патент РФ №2507531, рег. в ГосРеестре РФ 20.02.2014.]. Другим вариантом МА ПВО, применяемым для точного отсчета и автосопровождения координат источника излучения, является использование дискриминации, т.е. измерения не самих текущих значений оценок направления α*(t) и дальности D*(t), а знаков и величин их отклонений δα(t) и δD(t) от «опорной» точки - предполагаемого расположения источника, задаваемого по положению максимума СО, а затем отслеженного по предыдущим измерениям [Патент РФ №2623831, рег. в ГР РФ. 29 июня 2017 г., прототип].
В локации источников излучения актуальной является задача пассивного определения координат движущегося слабого источника в поле помех, содержащем составляющие, обусловленные сильными мешающими источниками излучения. Мешающее воздействие суммарного поля помехи, в частности его когерентных составляющих, приводит к подавлению сигнала слабого источника, к ошибкам измерения координат, особенно дальности, и затрудняет решение актуальных задач наблюдения и автоматического сопровождения объекта. В плоско-волновой гидроакустике дальней зоны известны применения методов режекции сильного сигнала мешающего источника из суммарного процесса на выходе сформированного пространственного канала (канала наблюдения), направленного на «полезный» источник излучения S [Г.С. Малышкин. Оптимальные и адаптивные методы обработки гидроакустических сигналов. Том 1. СПб, ОАО «Концерн «Электроприбор». 2011].
Недостатком этого метода в ближней зоне является невозможность точного фазирования сигналов при фокусировке ПС в мешающем канале и канале наблюдения из-за кривизны волнового фронта, что на дальностях ближней зоны поля источника не позволяет добиться достаточно глубокой режекции.
Известен способ обнаружения, наблюдения в заданных секторе углов и интервале дальностей и определения координат слабого источника в ближней зоне в присутствии сильного мешающего источника приемной системой (ПС) из М антенн (М>3) и P×Q пространственных каналов (ПК) в ближней зоне, путем режекции (вычитания) составляющих его поля на входах ПК [Патент №2711432. Опубл. января 2020 г.]. Для этого выполняют измерение сигнала мешающего источника (МИ), путем фокусирования ПС в точку текущего расположения МИ, для чего применяют автоматическое слежение за изменяющимися координатами МИ, а затем суммируют сфокусированные сигналы приемников ПС для каждого ПК, выполняя при этом режекцию сигнала МИ в выходных сигналах каждой антенны ПС. Достоинство этого способа в том, что он обеспечивает наблюдение, обнаружение и определение координат (направления и дальности) слабого «полезного» источника излучения на фоне сильного мешающего источника в ближнем поле. Недостатки этого способа в том, что он использует недостаточно точный «максимальный» отсчет положения максимума сигнальной отметки, не обеспечивает автоматическое сопровождение координат максимума и имеет погрешность определения координат движущегося источника излучения из-за инерционности статического осреднения.
Наиболее близким по совокупности общих признаков к предлагаемому техническому решению является «Способ пассивного определения координат движущегося источника излучения» [Патент РФ №2623831, опубл. 29 июня 2017 г.], содержащий прием сигналов с круговым волновым фронтом приемной системой (ПС) из М антенн (М≥3), расположенных в пространстве известным образом, предварительную и межантенную пространственно-временную обработку, включающую прием и преобразование акустических сигналов, усиление и фильтрацию сигналов приемников антенн ПС с частотной характеристикой h(ƒ), преобразование Фурье (БПФ), обзор с индикатором и координатными шкалами направления а и дальности D, отображающими расположение источников излучения в поле наблюдения в виде сигнальных отметок (СО). Для точного определения координат и сопровождения используют дискриминацию - измерение знака и величины отклонений текущих измерений от значений направления δα и дальности δD до «опорной» точки (ОТ) с координатами αоп и Dоп, которые в момент наведения принимают равными положению максимума СО: αоп(t0)=αmax(t0) и Dоп(t0)=Dmax(t0), а далее, в процессе их сопровождения, корректируют и прогнозируют известными методами динамического сглаживания оценок [Кузьмин С.З. Цифровая обработка радиолокационной информации. М: Сов. радио. 1967]. Для дискриминации отклонений δαi и δDi в процессе сопровождения на каждом i-м цикле БПФ фазируют каждую m-ю антенну в направлении от ее центра на ОТ. Для каждой mn-й пары антенн (m, n=1, 2, …, М) измеряют попарные взаимные спектры плотности мощности (ПВСПМ) сигналов с выходов (сумматоров) антенн. Последующие этапы определения δαi и δDi в прототипе различны. Для дискриминации углового отклонения δαi используют метод пеленгования с учетом дальности D=Dоп - дискриминатор направления, включающий: определение по формулам тригонометрии разностей времен прихода сигнала tmi, tni из опорной точки к центрам каждой mn-й пары антенн: τmni=tmi-tni и весовых коэффициентов wamni, равных производной  [Патент РФ №2623831, прототип, п. 2,], используя координаты ОТ, центров антенн и скорость звука с. Определяют значение «измерительной» части дискриминационной характеристики отклонения направления (ДХН) - с1, для чего суммируют по частоте ƒk значения ПВСПМ каждой пары с умножением на характеристику приемного тракта по выходу предварительной обработки hk, на коэффициент компенсации разности времен прихода сигнала τmni к mn-й паре антенн ехр(-j2πƒτmni) и на частоту ƒk, затем суммируют по mn результаты всех пар антенн с весовыми коэффициентами wamni. Аналогично определяют значение «нормирующей» части ДХН - c2, суммируя значения ПВСПМ сначала по частоте ƒk, с умножением на квадрат частоты, а затем по mn, с умножением на квадрат wamni. Таким образом, получают значение отклонения δai=c1/с2, а оценку направления
[Патент РФ №2623831, прототип, п. 2,], используя координаты ОТ, центров антенн и скорость звука с. Определяют значение «измерительной» части дискриминационной характеристики отклонения направления (ДХН) - с1, для чего суммируют по частоте ƒk значения ПВСПМ каждой пары с умножением на характеристику приемного тракта по выходу предварительной обработки hk, на коэффициент компенсации разности времен прихода сигнала τmni к mn-й паре антенн ехр(-j2πƒτmni) и на частоту ƒk, затем суммируют по mn результаты всех пар антенн с весовыми коэффициентами wamni. Аналогично определяют значение «нормирующей» части ДХН - c2, суммируя значения ПВСПМ сначала по частоте ƒk, с умножением на квадрат частоты, а затем по mn, с умножением на квадрат wamni. Таким образом, получают значение отклонения δai=c1/с2, а оценку направления  на i-м цикле БПФ определяют путем корректировки αопi на величину измеренного отклонения δαi:
на i-м цикле БПФ определяют путем корректировки αопi на величину измеренного отклонения δαi:  .
.
В отличие от направления, отклонение дальности δDi в прототипе [Патент РФ №2623831, п. 3] определяют путем нахождения точки пересечения выходной характеристикой дискриминатора отклонения дальности (ДХД)  оси дальностей D, иначе говоря ищут нулевую точку ДХД на оси D в окрестностях Dопi. Для этого сканируют величину D в окрестностях вершины главного максимума СО, пересчитывая ДХД с использованием нечетных попарных взаимно-корреляционных функций (НВКФ) сигналов антенн [A.M. Заездный, Основы расчетов по статистической радиотехнике. М.: «Связь». 1969. С. 165-167], комплексное накопление и обратное преобразование Фурье.
оси дальностей D, иначе говоря ищут нулевую точку ДХД на оси D в окрестностях Dопi. Для этого сканируют величину D в окрестностях вершины главного максимума СО, пересчитывая ДХД с использованием нечетных попарных взаимно-корреляционных функций (НВКФ) сигналов антенн [A.M. Заездный, Основы расчетов по статистической радиотехнике. М.: «Связь». 1969. С. 165-167], комплексное накопление и обратное преобразование Фурье.
Преимущество этого способа заключается в повышении точности определения координат (направления и дальности) движущегося источника излучения благодаря использованию дискриминационного метода оценок координат («нулевой» отсчет) и уменьшения ошибок при слежении за перемещающимся источником, связанных с «инерционностью» статического осреднения. Недостатком является неустойчивость к воздействию сильного сигнала мешающего источника излучения, при котором наблюдается подавление сигнала источника, являющегося объектом наблюдения, смещение оценок его координат и увеличение флуктуационной погрешности их измерения, вплоть до полной потери контакта.
Задачей изобретения является повышение точности определения координат источника излучения пассивным гидролокатором в ближней зоне поля малошумного движущегося источника излучения путем уменьшения воздействия сильного мешающего источника на обработку сигнала, интересующего наблюдателя.
Техническим результатом предлагаемого изобретения является подавление составляющих сигнала мешающего источника (МИ) в канале наблюдения, с учетом кривизны волнового фронта, при дискриминации отклонений оценок направления и дальности от их опорных значений, что обеспечивает повышение точности определения координат и устойчивости сопровождения слабого движущегося источника излучения.
Для обеспечения указанного технического результата, в способ пассивного определения координат движущегося источника излучения, содержащий прием сигналов с круговым волновым фронтом приемной системой (ПС) из М антенн (М≥3), расположенных в пространстве известным образом, предварительную и меж-антенную пространственно-временную обработку, включающую дискретизацию, быстрое преобразование Фурье (БПФ), обзор с индикатором и координатными шкалами направления α и дальности D, отображающими расположение источников излучения в поле наблюдения в виде их сигнальных отметок (СО) и точное определение координат и автосопровождение, использующие дискриминацию - измерение знака и величины отклонений δα и δD текущих измерений направления и дальности от координат «опорной» точки (ОТ) αоп и Dоп путем фазирования антенн ПС в направлении на ОТ, измерения попарных взаимных спектров плотности мощности (ВСПМ) всех пар антенн ПС и определения δα как значения нормированной дискриминационной характеристики направления (ДХН), для чего из треугольника SAmAn, где S, Am, An - точки расположения источника излучения S и центров m-й и n-й антенн ПС соответственно, находят времена прихода сигнала tm, tn из опорной точки ОТ S к центрам каждой mn-й пары антенн ПС, их разности τmn=tm-tn и весовые коэффициенты wamn и wDmn, равные производным  и
и  соответственно, а величину отклонения дальности δD определяют путем поиска точки пересечения оси значений дальности D дискриминационной характеристикой дальности (ДХД), т.е. нулевой точки ДХД на оси D в окрестностях ОТ S, введены следующие новые признаки: используют два канала определения координат и автоматического слежения за источниками, один из которых наводят в точку расположения мешающего источника излучения (канал МИ), путем фазирования антенн ПС по направлению αМИ и дальности DМИ в точку максимума СО МИ на индикаторе обзора, и применяют слежение за его изменяющимися координатами αМИ(t), DМИ(t) известным способом (прототип). Второй - канал наблюдения (основной), наводят в предполагаемую или наблюдаемую - «опорную» точку (ОТ S) расположения искомого «полезного» сигнала источника излучения S, интересующего наблюдателя, с предполагаемыми координатами αSоп(t), DSоп(t). В канале МИ на каждом i-м цикле БПФ, на частотах ƒk измеряют спектры плотности мощности (СПМ) сигнала МИ на выходах всех антенн ПС Pmki и осредняют «скользящим окном» за время заданного количества циклов БПФ, получая
соответственно, а величину отклонения дальности δD определяют путем поиска точки пересечения оси значений дальности D дискриминационной характеристикой дальности (ДХД), т.е. нулевой точки ДХД на оси D в окрестностях ОТ S, введены следующие новые признаки: используют два канала определения координат и автоматического слежения за источниками, один из которых наводят в точку расположения мешающего источника излучения (канал МИ), путем фазирования антенн ПС по направлению αМИ и дальности DМИ в точку максимума СО МИ на индикаторе обзора, и применяют слежение за его изменяющимися координатами αМИ(t), DМИ(t) известным способом (прототип). Второй - канал наблюдения (основной), наводят в предполагаемую или наблюдаемую - «опорную» точку (ОТ S) расположения искомого «полезного» сигнала источника излучения S, интересующего наблюдателя, с предполагаемыми координатами αSоп(t), DSоп(t). В канале МИ на каждом i-м цикле БПФ, на частотах ƒk измеряют спектры плотности мощности (СПМ) сигнала МИ на выходах всех антенн ПС Pmki и осредняют «скользящим окном» за время заданного количества циклов БПФ, получая  - осредненный СПМ, где m=1, …, М, k - номер элемента преобразования Фурье. Для каждой антенны измеряют также взаимные спектры плотности мощности (ВСПМ) сигналов с выходов каналов МИ и S: Gmki, которые также осредняют за время заданного количества предыдущих циклов БПФ:
- осредненный СПМ, где m=1, …, М, k - номер элемента преобразования Фурье. Для каждой антенны измеряют также взаимные спектры плотности мощности (ВСПМ) сигналов с выходов каналов МИ и S: Gmki, которые также осредняют за время заданного количества предыдущих циклов БПФ:  - осредненный ВСПМ. Вектор
- осредненный ВСПМ. Вектор  сигналов с выходов антенн ПС по каналу S «очищают» от составляющих сигнала мешающего источника
сигналов с выходов антенн ПС по каналу S «очищают» от составляющих сигнала мешающего источника 
 путем их взвешенного вычитания из сигналов ymki(αS,DS) с весом, равным отношению
путем их взвешенного вычитания из сигналов ymki(αS,DS) с весом, равным отношению  , получая вектор «очищенных» сигналов
, получая вектор «очищенных» сигналов  . Формируют значения дискриминации отклонений направления
. Формируют значения дискриминации отклонений направления  и дальности
и дальности  , используя вектор
, используя вектор  , попарные разности τmn времен прихода сигнала к m-й и n-й антеннам ПС и весовые коэффициенты wamn и wDmn, а текущие координаты источника излучения S определяют путем корректировки координат его опорной точки:
, попарные разности τmn времен прихода сигнала к m-й и n-й антеннам ПС и весовые коэффициенты wamn и wDmn, а текущие координаты источника излучения S определяют путем корректировки координат его опорной точки:  .
.
Новизна предлагаемого способа определения направления и дальности слабого источника излучения в ближней зоне его поля заключается в применении двухкоординатной режекции составляющей сигнала мешающего источника в канале наблюдения и слежения за источником, интересующим наблюдателя.
Сущность предполагаемого изобретения поясняется фиг. 1-4:
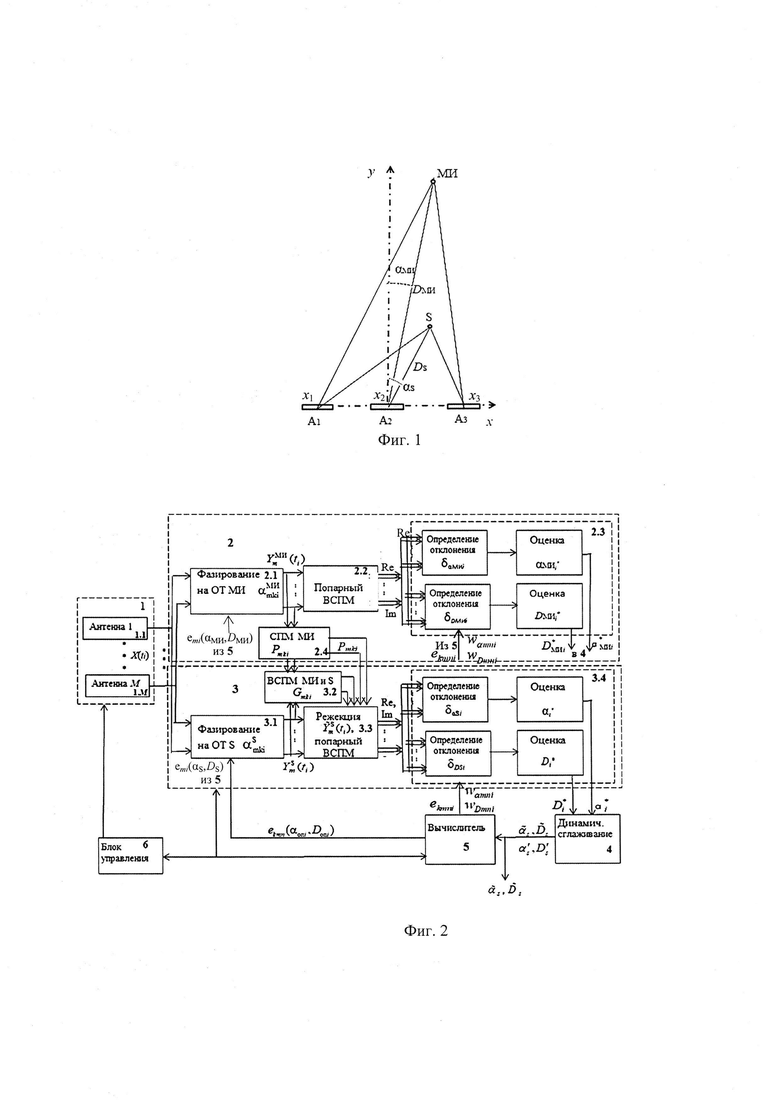
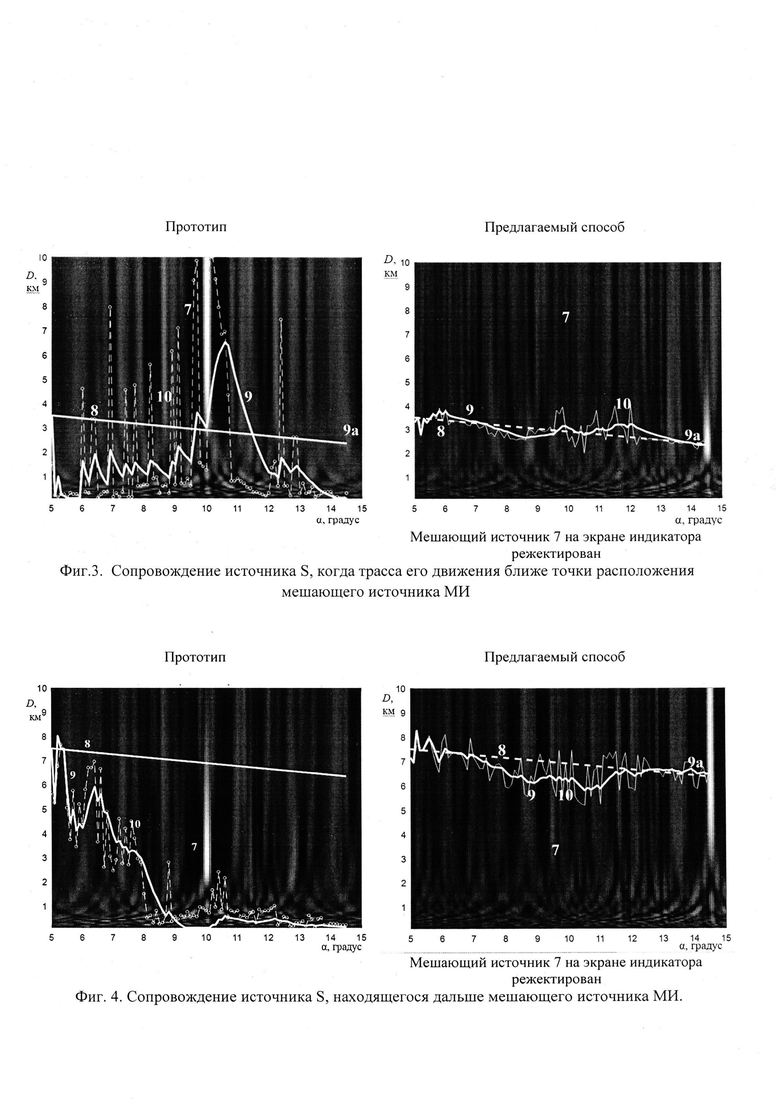
Фиг. 1 Геометрическая схема системы «источники излучения-антенны» на примере ПС из 3-х антенн и двух источниках излучения; Фиг. 2 Пример блок-схемы устройства, реализующего предлагаемый способ; Фиг. 3 и фиг. 4 - два численных примера трассы автосопровождения источника излучения в присутствии МИ на индикаторе обзора пассивного гидролокатора, традиционным способом (прототип, кадры слева) и предлагаемым способом, на фиг. 4 трасса сопровождения сигнала S проходит ближе места расположения МИ, а на фиг. 4 - дальше, чем МИ.
На фиг. 1: [х, у] - система координат, A1, А2, A3 - антенны ПС, х1, х2, x3 - координаты центров антенн, х2=0 (начало координат); МИ, S - мешающий и «полезный» источники излучения соответственно; αМИ, αS - направления на источники МИ и S, соответственно; DМИ, DS - дальности до источников МИ и S, соответственно.
На фиг. 2: блок 1 - приемная система с антеннами ПС А1+АМ (модули 1.1÷1.М), М≥3; блок 2 (канал МИ) и блок 3 (канал S)- блоки автосопровождения МИ и S, соответственно; блок 4 - блок динамического сглаживания (программируемый процессор); блок 5 - вычислитель (программируемый процессор); блок 6 - блок управления, содержащий органы управления средствами обработки, индикатор обзора, визиры считывания координат и наведения, органы управления средствами, режимами обработки, индикации и пр.
В блоке 2: модуль 2.1 - фазирование антенн ПС в направлении на ОТ МИ, выход модуля 2.1 - массив сигналов с сумматоров антенн ПС  , из блока 5 сюда поступают коэффициенты фазирования в опорную точку сопровождения МИ ekmi(αМИ, DМИ); модуль 2.2 - определение попарных комплексных (Re, Im) ВСПМ выходных сигналов антенн; 2.3 - модуль определения отклонений координат ОТ МИ δαМИ и δDМИ от текущего расположения МИ (дискриминация отклонений направления и дальности до МИ) и определения координат МИ на i-м цикле
, из блока 5 сюда поступают коэффициенты фазирования в опорную точку сопровождения МИ ekmi(αМИ, DМИ); модуль 2.2 - определение попарных комплексных (Re, Im) ВСПМ выходных сигналов антенн; 2.3 - модуль определения отклонений координат ОТ МИ δαМИ и δDМИ от текущего расположения МИ (дискриминация отклонений направления и дальности до МИ) и определения координат МИ на i-м цикле  , которые поступают в блок 4 динамического сглаживания. В модуль 2.3 из блока 5 (Вычислитель) на i-ом цикле БПФ поступают данные: коэффициенты компенсации разности времен прихода сигнала tmi, tni из опорной точки к центрам каждой mn-й пары антенн: ekmni=ехр(-j2πƒkτmn), где τmni=tmi-tni и весовых коэффициентов wamni, равных производной
, которые поступают в блок 4 динамического сглаживания. В модуль 2.3 из блока 5 (Вычислитель) на i-ом цикле БПФ поступают данные: коэффициенты компенсации разности времен прихода сигнала tmi, tni из опорной точки к центрам каждой mn-й пары антенн: ekmni=ехр(-j2πƒkτmn), где τmni=tmi-tni и весовых коэффициентов wamni, равных производной  ; 2.4 - определение осредненного спектра плотности мощности МИ
; 2.4 - определение осредненного спектра плотности мощности МИ  .
.
В блоке 3: модуль 3.1 - фазирование антенн ПС в направлении на ОТ S  с коэффициентами компенсации разности времен прихода сигнала tmi, tni из опорной точки к центрам каждой mn-й пары антенн emi(αS,DS) из блока 5; модуль 3.2 - измерение и осреднение взаимных спектров плотности мощности (ВСПМ) сигналов с выходов каналов МИ и S:
с коэффициентами компенсации разности времен прихода сигнала tmi, tni из опорной точки к центрам каждой mn-й пары антенн emi(αS,DS) из блока 5; модуль 3.2 - измерение и осреднение взаимных спектров плотности мощности (ВСПМ) сигналов с выходов каналов МИ и S:  , модуль 3.3 - режекция составляющей сигнала МИ в выходных сигналах канала S и определение попарных комплексных ВСПМ выходных «очищенных» сигналов антенн; 3.4 - определение отклонений координат ОТ S δαS и δDS от текущего расположения источника S (дискриминаторы отклонений) и определение его координат на i-м цикле
, модуль 3.3 - режекция составляющей сигнала МИ в выходных сигналах канала S и определение попарных комплексных ВСПМ выходных «очищенных» сигналов антенн; 3.4 - определение отклонений координат ОТ S δαS и δDS от текущего расположения источника S (дискриминаторы отклонений) и определение его координат на i-м цикле  .
.
На фиг. 3 и фиг. 4 представлены численные примеры фрагмента трассы автосопровождения координат слабого источника S в присутствии сильного мешающего источника МИ (см геометрическую схему фиг. 1). На рисунках фиг. 3 и 4: 7 - сигнальная отметка МИ, 8 - истинная траектория перемещения источника S, 9а - сигнальная отметка источника S в конце фрагмента наблюдения, 9 - трасса сопровождения источника S, 10 - точечные измерения координат источника S, без осреднения.
Использование предлагаемого способа пассивным гидролокатором осуществляется следующим образом. При необходимости найти малый объект S и определить его координаты αS, DS в окрестностях сильного мешающего источника МИ (см. схему фиг. 1), сначала фиксируют местоположение сильного МИ с координатами αМИ, DМИ, вводя его в режим автоматического сопровождения (модуль 2.3) по двум координатам и циклического измерения спектральной плотности мощности (модуль 2.4)  с осреднением за заданное число циклов БПФ.
с осреднением за заданное число циклов БПФ.
В начальный момент i=1 последовательного определения текущих координат источника S назначают опорную точку (ОТ) - место предполагаемого расположения, используя данные обзора или других средств наблюдения. Антенны ПС (блок 1) фазируют в направлении на эту точку в блоке 3 (модуль 3.1), В то же время начинается измерение взаимного спектра плотности мощности каналов МИ и S  (модуль 3.2), также со скользящим осреднением, данные которого вместе с СПМ МИ из модуля 2.4 используют для режекции компонентов сигнала МИ в очищаемых каналах S (модуль 3.3).
(модуль 3.2), также со скользящим осреднением, данные которого вместе с СПМ МИ из модуля 2.4 используют для режекции компонентов сигнала МИ в очищаемых каналах S (модуль 3.3).
Режекция выполняется путем взвешенного вычитания сигналов канала МИ из одноименных сигналов канал S в соответствии с выражением:
 , где ymkt(αS,DS) - выходные сигналы антенн ПС, фазированных в опорную точку наблюдения «полезного» источника, ymki(αМИ,DМИ) - сигналы антенн ПС, фазированных в точку расположения МИ, m - номер антенны, k - номер частотного элемента преобразования Фурье, i - индекс очередного цикла БПФ. В модуль 3.4 из блока 5 (Вычислитель) на i-ом цикле БПФ поступают данные: коэффициенты компенсации разности времен прихода сигнала tmi, tni из опорной точки сопровождения источника S к центрам каждой mn-й пары антенн:
, где ymkt(αS,DS) - выходные сигналы антенн ПС, фазированных в опорную точку наблюдения «полезного» источника, ymki(αМИ,DМИ) - сигналы антенн ПС, фазированных в точку расположения МИ, m - номер антенны, k - номер частотного элемента преобразования Фурье, i - индекс очередного цикла БПФ. В модуль 3.4 из блока 5 (Вычислитель) на i-ом цикле БПФ поступают данные: коэффициенты компенсации разности времен прихода сигнала tmi, tni из опорной точки сопровождения источника S к центрам каждой mn-й пары антенн:  , где τmni=tmi-tni и весовых коэффициентов wamni, равных производной
, где τmni=tmi-tni и весовых коэффициентов wamni, равных производной  .
.
В этом же модуле определяются попарные ВСПМ очищенных сигналов антенн, поступающие в модуль 3.4 для определения значений отклонений (дискриминации) δαSi и αDSi и текущих оценок координат  путем коррекции координат опорной точки на величины отклонений. Оценки поступают в блок 4 динамического сглаживания, откуда вместе с другими данными траектории источника используются потребителями.
путем коррекции координат опорной точки на величины отклонений. Оценки поступают в блок 4 динамического сглаживания, откуда вместе с другими данными траектории источника используются потребителями.
Наглядные результаты использования предлагаемого способа пассивным гидролокатором показаны на численных примерах, иллюстрированных фиг. 3 и 4. Для численного примера принята модель приемной системы (ПС) из пяти антенн (М=5). Базовый размер ПС В=60 м (4×15 м); число приемников в каждой антенне Nпр=20, интервал между приемниками  , где λв - длина волны на верхней частоте диапазона приема λв=0.1875 м, В/λв=320. Полоса частот приема 4.0÷8.0 кГц, время осреднения Тн=1.3 с. Соотношение мощностей сигналов и распределенной помехи: сигнал МИ вдвое слабее распределенной помехи, уровни излучения МИ и источника S в точках расположения приемников ПС находятся в соотношении 3:1 (по давлению).
, где λв - длина волны на верхней частоте диапазона приема λв=0.1875 м, В/λв=320. Полоса частот приема 4.0÷8.0 кГц, время осреднения Тн=1.3 с. Соотношение мощностей сигналов и распределенной помехи: сигнал МИ вдвое слабее распределенной помехи, уровни излучения МИ и источника S в точках расположения приемников ПС находятся в соотношении 3:1 (по давлению).
Как видно из результатов, представленных на картинах фиг. 3 и 4 слева (прототип), адекватное сопровождение и измерение координаты поддерживается только по направлению αS. По дальности оно фактически отсутствует, в то время как на картинах фиг. 3 и 4 справа (предлагаемый способ) наблюдается уверенное сопровождение по двум координатам по всей трассе, с незначительным смещением оценки дальности в секторе углов, близких к направлению на мешающий источник. Количественная оценка преимущества предлагаемого способа определения координат слабого источника излучения в присутствии сильного МИ по предлагаемому способу в секторе измерений координат в окрестностях направления створивания с МИ (10°±5°) при соотношении уровней сигналов в точке приема (по давлению) рМИ/pS=3/1: соотношение среднеквадратических величин флуктуационной погрешности измерения дальности известным, традиционным σтр предлагаемым σпр способами в данном численном примере равно σтр/σпр=7.92.
Величина смещения оценки дальности на картинах фиг. 3 и 4, слева (прототип), свидетельствует фактически о ее недостоверности, в то время как на картинах справа (предлагаемый способ) смещение оценки дальности ≈0.5-0.9 км наблюдается лишь в секторе ±2° от направления створивания источников излучения (10°).
Введение новых признаков позволяет повысить точность определения координат и надежность автосопровождения движущегося источника излучения пассивным гидролокатором путем уменьшения степени подавления мешающим источником МИ «полезного» сигнала S и уменьшения погрешностей, как связанных со смещением нулевых значений ДХН и ДХД на шкалах направления и дальности, соответственно, так и флуктуационной погрешности, благодаря глубокой режекции сигнала МИ в главном канале, обусловленной высокой фазовой точностью автосопровождения МИ по двум координатам и отслеживания соотношения мощностей составляющих МИ и сигнала «полезного» источника излучения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения дальности до движущегося источника излучения пассивным гидролокатором | 2022 |
|
RU2797779C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2018 |
|
RU2711432C1 |
| Способ пассивного определения координат движущегося слабого источника излучения | 2019 |
|
RU2724315C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2016 |
|
RU2623831C1 |
| Способ определения координат источников излучения пассивным гидролокатором | 2021 |
|
RU2788476C1 |
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 2012 |
|
RU2507531C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2538105C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕЛЕЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2530808C1 |
| Способ пеленгования движущегося источника излучения при воздействии импульсных помех | 2023 |
|
RU2810703C1 |
Использование: изобретение относится к области гидроакустики и может быть использовано в пассивной гидролокации в ближней зоне излучения источника с круговым волновым фронтом с бортовыми разнесенными и протяженными антеннами, буксируемыми и стационарными, а также в атмосферной акустике и пассивной радиолокации. Сущность: в способе определения координат движущегося источника излучения пассивным гидролокатором содержащем прием сигналов с круговым волновым фронтом приемной системой (ПС) из М антенн (М≥3), расположенных в пространстве известным образом, предварительную и меж-антенную пространственно-временную обработку, включающую дискретизацию, быстрое преобразование Фурье (БПФ), обзор пространства на индикаторе с координатными шкалами направления α и дальности D, отображающими расположение источников излучения в поле наблюдения в виде их сигнальных отметок (СО) и средства точного определения координат и автосопровождения, использующие дискриминацию - измерение знака и величины отклонений текущих измерений от направления δα и дальности δD до «опорной» точки (ОТ) с координатами αоп и Dоп, в присутствии мешающего источника (МИ), используют два канала определения координат и автоматического слежения за источниками, один из которых канал МИ, наводят в точку расположения мешающего источника излучения путем фазирования антенн, второй - канал наблюдения наводят в предполагаемую или наблюдаемую - «опорную» точку (ОТ S) расположения искомого «полезного» сигнала источника излучения S, интересующего наблюдателя, с предполагаемыми координатами αSоп(t), DSоп(t), в канале МИ измеряют спектры плотности мощности (СПМ) сигнала МИ Pmki, а также взаимные спектры плотности мощности (ВСПМ) сигналов с выходов каналов МИ и S: Gmki. С сигналы с выходов антенн ПС, поступающие в канал наблюдения S, «очищают» от составляющих сигнала мешающего источника  путем их взвешенного вычитания из сигналов ymki(αS, DS) c весом, равным отношению
путем их взвешенного вычитания из сигналов ymki(αS, DS) c весом, равным отношению  , формируют значения дискриминации отклонений направления
, формируют значения дискриминации отклонений направления  и дальности
и дальности  , а текущие координаты источника излучения S определяют путем корректировки координат опорной точки:
, а текущие координаты источника излучения S определяют путем корректировки координат опорной точки:  . Технический результат: повышение точности определения координат источника излучения пассивным гидролокатором в ближней зоне поля малошумного движущегося источника излучения, путем уменьшения воздействия сильного мешающего источника на обработку сигнала, интересующего наблюдателя. 4 ил.
. Технический результат: повышение точности определения координат источника излучения пассивным гидролокатором в ближней зоне поля малошумного движущегося источника излучения, путем уменьшения воздействия сильного мешающего источника на обработку сигнала, интересующего наблюдателя. 4 ил.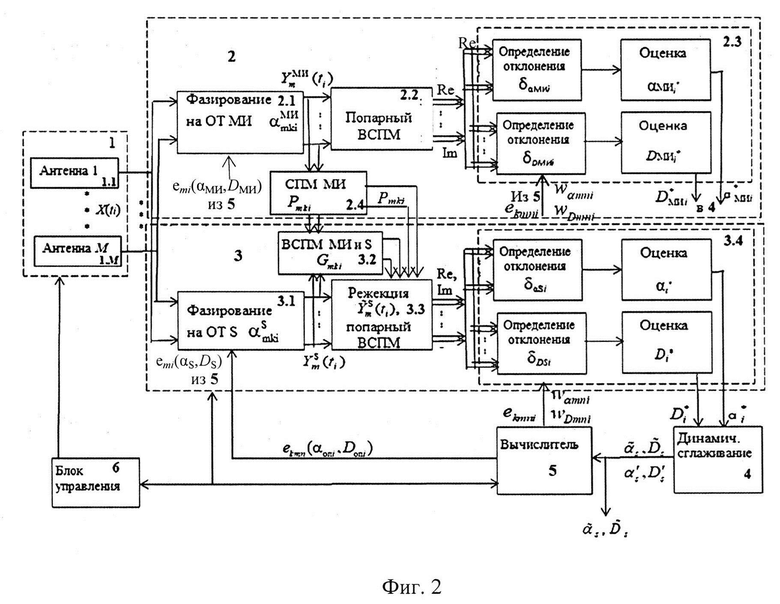
Способ определения координат движущегося источника излучения пассивным гидролокатором, содержащий прием сигналов с круговым волновым фронтом приемной системой (ПС) из М антенн, где М≥3, расположенных в пространстве известным образом, предварительную и межантенную пространственно-временную обработку, включающую дискретизацию, быстрое преобразование Фурье (БПФ), обзор с индикатором и координатными шкалами направления α и дальности D, отображающими расположение источников излучения в поле наблюдения в виде их сигнальных отметок (СО) и точное определение координат и автосопровождение, использующие дискриминацию - измерение знака и величины отклонений текущих измерений от направления δα и дальности δD до «опорной» точки (ОТ) αоп и Dоп путем фазирования антенн ПС в направлении на ОТ, измерения попарных взаимных спектров плотности мощности (ВСПМ) всех пар антенн ПС и определения δα как значения нормированной дискриминационной характеристики направления (ДХН), для чего из треугольника SAmAn, где S, Am, An - точки расположения источника излучения S и центров m-й и n-й антенн ПС соответственно, находят времена прихода сигнала tm, tn из опорной точки к центрам каждой mn-й пары антенн ПС, их разности τmn=tm-tn и весовые коэффициенты wαmn и wDmn, равные производным  и
и  соответственно, а величину отклонения дальности δD определяют путем поиска точки пересечения оси значений дальности D дискриминационной характеристикой дальности (ДХД), т.е. нулевой точки ДХД на оси D в окрестностях ОТ S, отличающийся тем, что используют два канала определения координат и автоматического слежения за источниками, один из которых наводят в точку расположения мешающего источника излучения (канал МИ) путем фазирования антенн ПС по направлению и дальности в точку максимума СО МИ на индикаторе обзора, и применяют слежение за его изменяющимися координатами αМИ(t), DМИ(t), второй - канал наблюдения наводят в предполагаемую или наблюдаемую - «опорную» точку (ОТ S) расположения искомого «полезного» сигнала источника излучения S, интересующего наблюдателя, с предполагаемыми координатами αSоп(t), DSоп(t), в канале МИ на каждом i-м цикле БПФ, на частотах ƒk измеряют спектры плотности мощности (СПМ) сигнала МИ на выходах всех антенн ПС Pmki и осредняют «скользящим окном» за время заданного количества циклов БПФ, получая
соответственно, а величину отклонения дальности δD определяют путем поиска точки пересечения оси значений дальности D дискриминационной характеристикой дальности (ДХД), т.е. нулевой точки ДХД на оси D в окрестностях ОТ S, отличающийся тем, что используют два канала определения координат и автоматического слежения за источниками, один из которых наводят в точку расположения мешающего источника излучения (канал МИ) путем фазирования антенн ПС по направлению и дальности в точку максимума СО МИ на индикаторе обзора, и применяют слежение за его изменяющимися координатами αМИ(t), DМИ(t), второй - канал наблюдения наводят в предполагаемую или наблюдаемую - «опорную» точку (ОТ S) расположения искомого «полезного» сигнала источника излучения S, интересующего наблюдателя, с предполагаемыми координатами αSоп(t), DSоп(t), в канале МИ на каждом i-м цикле БПФ, на частотах ƒk измеряют спектры плотности мощности (СПМ) сигнала МИ на выходах всех антенн ПС Pmki и осредняют «скользящим окном» за время заданного количества циклов БПФ, получая  , где m=1,…, М, k - номер элемента преобразования Фурье, для каждой антенны измеряют также взаимные спектры плотности мощности (ВСПМ) сигналов с выходов каналов МИ и S: Gmki. которые также осредняют за время заданного количества предыдущих циклов БПФ:
, где m=1,…, М, k - номер элемента преобразования Фурье, для каждой антенны измеряют также взаимные спектры плотности мощности (ВСПМ) сигналов с выходов каналов МИ и S: Gmki. которые также осредняют за время заданного количества предыдущих циклов БПФ:  , вектор
, вектор  сигналов с выходов антенн ПС по каналу S «очищают» от составляющих сигнала мешающего источника
сигналов с выходов антенн ПС по каналу S «очищают» от составляющих сигнала мешающего источника 
 путем их взвешенного вычитания из сигналов ymki(αS,DS) с весом, равным отношению
путем их взвешенного вычитания из сигналов ymki(αS,DS) с весом, равным отношению  , получая вектор «очищенных» сигналов
, получая вектор «очищенных» сигналов  , формируют значения дискриминации отклонений направления
, формируют значения дискриминации отклонений направления  и дальности
и дальности  , используя вектор
, используя вектор  , попарные разности τmn времен прихода сигнала к m-й и n-й антеннам ПС и весовые коэффициенты wamn и wDmn, а текущие координаты источника излучения S определяют путем корректировки координат опорной точки:
, попарные разности τmn времен прихода сигнала к m-й и n-й антеннам ПС и весовые коэффициенты wamn и wDmn, а текущие координаты источника излучения S определяют путем корректировки координат опорной точки:  ,
,  .
.
| СПОСОБ ПАССИВНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ ДВИЖУЩЕГОСЯ ИСТОЧНИКА ИЗЛУЧЕНИЯ | 2016 |
|
RU2623831C1 |
| Способ определения координат движущихся источников излучения пассивным гидролокатором | 2017 |
|
RU2658519C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2017 |
|
RU2680860C1 |
| Способ пассивного определения координат движущегося слабого источника излучения | 2019 |
|
RU2724315C1 |
| Способ пассивного определения координат источников гидроакустического излучения | 2018 |
|
RU2711432C1 |
| US 5805525 A1, 08.09.1998. | |||
