Изобретение относится к радиотехнике и может быть использовано в бортовой аппаратуре радиотехнической системы навигации. Известен бортовой комплексный измеритель разности дальностей для системы навигации летательных аппаратов (ЛА), содержащий последовательно соединенные приемную антенну (А) и приемник (ПРМ), выход которого соединен с входами усилителя (УС) и формирователя характерной точки (ФХТ), последовательно соединенные первые дискриминатор (Д), сумматор (СУМ) и сглаживающий фильтр (СФ), последовательно соединенные вторые Д, СУМ и СФ, последовательно соединенные первые перестраиваемый генератор (ПГ) и фазовый манипулятор (ФМ), выход которого соединен с управляющим входом первого Д, последовательно соединенные вторые ПГ и ФМ, выход которого соединен с управляющим входом второго Д, опорный генератор (ОГ), выход которого подключен к выходам первого и второго ПГ, блок поиска (БП), блок управления (БУ), формирователь кодирующих сигналов (ФКС), формирователь стробов (ФС), блок регулируемой задержки (БРЗ) и третий СУМ, причем выход УС подключен к входу БП и к первым входам первого и второго Д, выход ФХТ подключен к вторым входам первого и второго Д, выход ФХТ подключен к вторым входам первого и второго Д, выход первого СФ подключен к управляющим входа первого ПГ и ФС и к входу управления задержкой первого строб-импульса БУ, выход опорной пачки импульсов с известной задержкой подключен к опорному входу БП, выход которого подключен к входу сигнала захвата БУ, выход второго СФ соединен с управляющим входом БРЗ, выход опорной пачки импульсов БУ подключен к входу ФКС, первый и второй выходы которого подключены к управляющим входам соответственно первого и второго ФМ. Выходы первого и второго строб-импульсов пачки БУ подключены к первым входам стробирования соответственно первого и второго Д, выход импульса запуска формирователя строб-импульсов слежения БУ подключен к входу ФС, выход которого подключен к второму входу стробирования первого Д и через БРЗ - к второму входу стробирования второго Д. Выходы первого и второго СФ подключены соответственно к первому и второму входам третьего СУМ, выход которого подключен к входу управления задержкой второго строб-импульса БУ и к управляющему входу второго ПГ, а также преобразователь составляющих горизонтальной скорости полета ЛА из инерциальной системы координат (СК) в сферическую СК (ПК), на первый и второй входы которого подаются сигналы, пропорциональные составляющим горизонтальной скорости полета ЛА, поступающие с выходов горизонтальных каналов инерциальной навигационной системы (ИНС), на третий, четвертый, пятый, шестой и седьмой входы подаются сигналы, пропорциональные измеренному значению Ψи истинного курса с выхода курсовой системы (КС), ортодромическому азимуту гироплатформы А, гироскопическому курсу Ψг и текущему значению азимута Атi (i = 1,2) на i-ю наземную станцию, последовательно соединенные первый бюлок вычитания (БВ), четвертый СУМ, первый фильтр нижних частот (ФНЧ) и первый умножитель (УМН), последовательно соединенные второй БВ, пятый СУМ, второй ФНЧ и второй УМН, при этом выходы первого и второго УМН подключены соответственно к вычитающим входам первого и второго БВ, на суммирующие входы которых подаются сигналы с первого и второго выходов ПК соответственно, выходы первого и второго дискриминаторов Д соединены соответственно через третий и четвертый УМН с вторыми входами четвертого и пятого сумматоров, выходы первого и второго ФНЧ соединены с вторыми входами первого и второго СУМ соответственно, причем выход второго СФ является выходом бортового комплексного измерителя разности дальностей для системы навинации ЛА.
Известный измеритель обладает недостаточной для решения ряда практических задач самолетовождения точностью измерения навигационного параметра - разности дальностей ΔD1. Это обусловлено ошибками, содержащимися в сигналах, несущих информацию о проекции путей скорости на направление ЛА - ведущая наземная станция и о разности проекции путевой скорости на направление ЛА - ведомая наземная станция и ЛА - ведущая наземная станция, наблюдаемых на выходе преобразователя ПК составляющих горизонтальной скорости полета ЛА, поступающих с выхода горизонтальных каналов ИНС, из инерциальной СК в сферическую СК. Указанные ошибки определяются точностью работы кусковой системы КС, с выхода которой на третий вход ПК подаются измененные значения Ψиистинного курса ЛА, содержащее медленно меняющиеся ошибки в измерении курса.
Для современных КС характерно то, что в течением времени указанная ошибка возрастает и достигает значительных величин, а это приводит к увеличению ошибок в определении проекций путевой скорости на направления ЛА - ведущая наземная станция и ЛА - ведомая наземная станция и к увеличению ошибок измерения разности дальностей.
Целью изобретения является повышение точности измерения разности дальностей.
Это достигается тем, что в известный бортовой комплексный измеритель разности дальностей для системы навигации ЛА дополнительно введены преобразователь гиперболических координат местоположения ЛА (МПЛА) в географические координаты (ПКЦ), на первый вход которого с выхода второго СФ поступает сигнал, пропорциональный разности дальностей до ведущей и первой ведомой наземных станций, на второй вход - сигнал, пропорциональный разности дальностей до ведущей и второй ведомой наземных станций, а на остальные входы - сигналы, пропорциональные географическим координатам (долготе и широте) наземных ведущей и ведомых станций λi и ϕi (i= ), с первого и второго выходов ПКЦ сигналы, пропорциональные географическим координатам λс и ϕс, подаются на входы третьего и четвертого блоков вычитания БВ соответственно, на вычитающие входы которых подаются сигналы, пропорциональные географическим координатам ведущей наземной станции λ1 и ϕ1 соответственно, последовательно соединенные делитель (ДЕЛ), функциональный преобразователь (ФП), пятый и шестой БВ, третий ФНЧ и седьмой БВ, выход которого соединен с третьим входом ПК, первый и второй входы ДЕЛ соединены соответственно с выходами третьего и четвертого БВ, на второй суммирующий вход пятого БВ подается сигнал, пропорциональный π, а на вычитающие входы - сигналы, пропорциональные курсовому углу радиомаяка βи с выхода автоматического радиокомпаса (АРК) и углу схождения меридианов δ, на суммирующие вторые входы шестого и седьмого БВ подается сигнал, пропорциональный измеренному значению Ψи истинного курса ЛА с выхода КС.
), с первого и второго выходов ПКЦ сигналы, пропорциональные географическим координатам λс и ϕс, подаются на входы третьего и четвертого блоков вычитания БВ соответственно, на вычитающие входы которых подаются сигналы, пропорциональные географическим координатам ведущей наземной станции λ1 и ϕ1 соответственно, последовательно соединенные делитель (ДЕЛ), функциональный преобразователь (ФП), пятый и шестой БВ, третий ФНЧ и седьмой БВ, выход которого соединен с третьим входом ПК, первый и второй входы ДЕЛ соединены соответственно с выходами третьего и четвертого БВ, на второй суммирующий вход пятого БВ подается сигнал, пропорциональный π, а на вычитающие входы - сигналы, пропорциональные курсовому углу радиомаяка βи с выхода автоматического радиокомпаса (АРК) и углу схождения меридианов δ, на суммирующие вторые входы шестого и седьмого БВ подается сигнал, пропорциональный измеренному значению Ψи истинного курса ЛА с выхода КС.
Введение в схему новых блоков и соответствующих связей позволяет выделить и компенсировать медленно меняющуюся ошибку КС и тем самым повысить точность измерения разности дальностей.
На фиг.1 представлена схема электрическая структурная бортового комплексного измерителя разности дальностей для системы навигации летательных аппаратов; на фиг.2 - геометрические соотношения между параметрами, измеряемыми КС, АРК и бортовым комплексным измерителем разности дальностей для системы навигации ЛА.
Бортовой комплексный измеритель разности дальностей для системы навигации ЛА содержит последовательно соединенные приемную антенну 1, приемник (ПРМ) 2, выход которого соединен с входами усилителя (УС) 3 и ФХТ 4, последовательно соединенные первые дискриминатор (Д) 5, сумматор (СУМ) 6, сглаживающий фильтр (СФ) 7, последовательно соединенные вторые Д8, СУМ 9, СФ 10, последовательно соединенные первые перестраиваемый генератор (ПГ) 11 и фазовый манипулятор (ФМ) 12, выход которого соединен с управляющим входом первого Д 5, последовательно соединенные вторые ПГ 13 и ФМ 14, выход которого соединен с управляющим входом второго Д8, опорный генератор (ОГ) 15, выход которого подключен к входам первого 11 и второго 13 ПГ, блок поиска (БП) 16, блок управления (БУ) 17, формирователь кодирующих сигналов (ФКС) 18, формирователь стробов (ФС) 19, блок регулируемой задержки (БРЗ) 20 и третий СУМ 21, причем выход УС 3 подключен к входу БП 16 и к первым входам первого 5 и второго 8 Д, выход ФХТ 4 подключен к вторым входам первого 5 и второго 8 Д, выход первого СФ 7 подключен к управляющим входам первого ПГ 11 и ФС 19 и к входу управления задержкой первого строб-импульса БУ 17, выход опорной пачки импульсов с известной задержкой которого подключен к опорному входу БП 16, выход которого подключен к входу сигнала захвата БУ 17, выход второго СФ 10 соединен с управляющим входом БРЗ 20, выход опорной пачки импульсов БУ 17 подключен к входу ФКС 18, первый и второй выходы которого подключены к управляющим входам соответственно первого 12 и второго 14 ФМ.
Выходы первого и второго строб-импульсов пачки БУ 17 подключены к первым входам стробирования соответственно первого 5 и второго 8 Д, выход импульса запуска формирователя строб-импульсов слежения БУ 17 подключен к входу ФС 19, выход которого подключен к второму входу стробирования первого Д 5 и через БРЗ 30 - к второму входу стробирования второго Д 8, выходы первого 7 и второго 10 СФ подключены соответственно к первому и второму входам третьего СУМ 21, выход которого подключены к входу управления задержкой второго строб-импульса БУ 17 и к управляющему входу ПГ 13, преобразователь составляющих горизонтальной скорости полета ЛА из инерциальной СК в сферическую СК ПК 22, на первый и второй входы которого подаются сигналы, пропорциональные составляющим горизонтальной скорости полета ЛА, поступающие с выходов горизонтальных каналов ИНС, на четвертый, пятый, шестой и седьмой входы подаются сигналы, пропорциональные ортодромическому азимуту гироплатформы А, гироскопическому курсу Ψг и текущему значению азимута Атi (i=1,2) на i-ю наземную станцию, последовательно соединенные первый блок вычитания БВ 23, четвертый СУМ 24, первый фильтр нижних частот ФНЧ 25 и первый умножитель УМН 26, последовательно соединенные второй БВ 27, пятый СУМ 28, второй ФНЧ 29 и второй УМН 30, при этом выходы первого 26 и второго 30 УМН подключены соответственно к вычитающим входам первого 23 и второго 27 БВ, на суммирующие входы которых подаются сигналы с первого и второго выходов ПК 22 соответственно.
Выходы первого 5 и второго 8 Д соединены соответственно через третий 31 и четвертый 32 УМН с вторыми входами четвертого 24 и пятого 28 СУМ, выходы первого 25 и второго 29 ФНЧ соединены с вторыми входами первого 6 и второго 9 СУМ соответственно. На первый вход преобразователя гиперболических координат МПЛА в географические координаты ПКЦ 33 с выхода второго СФ 10 поступает сигнал, пропорциональный разности дальностей до ведущей и первой ведомой наземных станций, на второй вход - сигнал, пропорциональный разности дальностей до ведущей и второй ведомой наземных станций, а на остальные входы - сигналы, пропорциональные географическим координатам наземных ведущей и ведомых станций λi и ϕi (i= ). С первого и второго выходов ПКЦ 33 сигналы, пропорциональные географическим координатам λс и ϕс, подаются на входы третьего 34 и четвертого 35 БВ соответственно, на вычитающие входы которых подаются сигналы, пропорциональные географическим координатам ведущей наземной станции λ1 и ϕ1 соответственно, последовательно соединенные ДЕЛ 36, ФП 37, пятый 38 и шестой 39 БВ, третий ФНЧ 40 и седьмой БВ 41, выход которого соединен с третьим входом ПК 22, первый и второй входы ДЕЛ 36 соединены соответственно с выходами третьего 34 и четвертого 35 БВ, на второй суммирующий вход пятого БВ 38 подается сигнал, пропорциональный π, а на вычитающие входы - сигналы, пропорциональные курсовому углу радиомаяка β с выхода АРК и углу схождения меридианов δ, на суммирующие входы шестого 39 и седьмого 41 БВ подается сигнал, пропорциональный измеренному значению Ψи истинного курса ЛА с выхода КС, причем выход второго СФ 10 является выходом бортового комплексного измерителя разности дальностей для системы навигации.
). С первого и второго выходов ПКЦ 33 сигналы, пропорциональные географическим координатам λс и ϕс, подаются на входы третьего 34 и четвертого 35 БВ соответственно, на вычитающие входы которых подаются сигналы, пропорциональные географическим координатам ведущей наземной станции λ1 и ϕ1 соответственно, последовательно соединенные ДЕЛ 36, ФП 37, пятый 38 и шестой 39 БВ, третий ФНЧ 40 и седьмой БВ 41, выход которого соединен с третьим входом ПК 22, первый и второй входы ДЕЛ 36 соединены соответственно с выходами третьего 34 и четвертого 35 БВ, на второй суммирующий вход пятого БВ 38 подается сигнал, пропорциональный π, а на вычитающие входы - сигналы, пропорциональные курсовому углу радиомаяка β с выхода АРК и углу схождения меридианов δ, на суммирующие входы шестого 39 и седьмого 41 БВ подается сигнал, пропорциональный измеренному значению Ψи истинного курса ЛА с выхода КС, причем выход второго СФ 10 является выходом бортового комплексного измерителя разности дальностей для системы навигации.
Напряжение, пропорциональное измеренному значению Ψи истинного курса ЛА с выхода КС, отличающееся от истинного значения курса Ψ на величину медленно меняющейся ошибки ΔΨ
Ψи= Ψ+ ΔΨ, (1) подаются на суммирующие входы шестого 39 и седьмого 41 БВ. Индекс "и" означает измеренное значение соответствующего параметра.
По информации о разностях дальностей до ведущей (А) и первой (В) и второй (С) ведомых наземных станций ΔD1* и ΔD2*, поступающей на первый и второй входы известного ПКЦ 33, и о значениях географических координат наземных станций λi и ϕi (i= ), поступающих на его другие входы, в ПКЦ 33 вычисляются географические координаты МПЛА λс* и ϕс*. С первого и второго выходов ПКЦ 33 сигналы, пропорциональные значениям о λс* и ϕс* поступают на суммирующие входы третьего 34 и четвертого 35 БВ.
), поступающих на его другие входы, в ПКЦ 33 вычисляются географические координаты МПЛА λс* и ϕс*. С первого и второго выходов ПКЦ 33 сигналы, пропорциональные значениям о λс* и ϕс* поступают на суммирующие входы третьего 34 и четвертого 35 БВ.
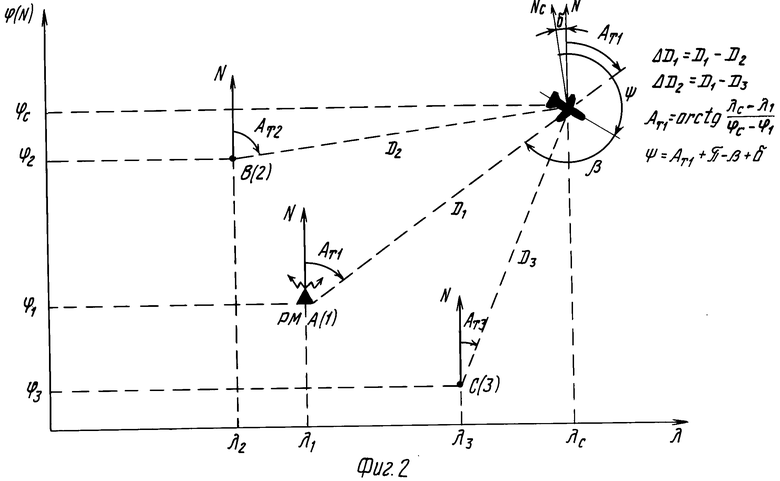
В третьем 34, четвертом 35, пятом 38 БВ, делителе ДЕЛ 36 и функциональном преобразователе ФП 37, реализующем функцию arctg(˙), с учетом известной аналитической связи курса Ψ, азимута Ат1 курсового угла РМ β и геометрии относительного расположения ЛА и наземных станций (см. фиг.2), формируется вычисленное значение курса, равное
Ψв= arctg +Π-βи+δ=Ψ-εв,, (2) где εB - суммарная ошибка измерения угла β АРК и вычисления λс* и ϕс* ПКЦ 33.
+Π-βи+δ=Ψ-εв,, (2) где εB - суммарная ошибка измерения угла β АРК и вычисления λс* и ϕс* ПКЦ 33.
С выхода пятого БВ 38 напряжение, пропорциональное вычисленному значению курса ΨВ, поступает на вычитающий вход шестого БВ 39. В результате на выходе шестого БВ 39 формируется напряжение, пропорциональное разности Ψи- ΨВ между измеренным при помощи КС значением истинного курса (1) и вычисленным по данным ПКЦ 33 и АРК значением курса (2).
Ψи- ΨВ= Δ Ψ-εB. (3)
Поскольку ошибка εB формируется в радиотехнических системах, то она является широкополосной флуктуационной. При прохождении сигнала (3) через третий ФНЧ 40 флуктуационная ошибка сглаживается, а на выходе третьего ФНЧ образуется сглаженное значение  медленно меняющейся ошибки Δ Ψ КС, которая практически без искажений проходит через третий ФНЧ 40.
медленно меняющейся ошибки Δ Ψ КС, которая практически без искажений проходит через третий ФНЧ 40.
Выделенная ошибка  далее вычитается в седьмом БВ 41 из измеренного значения Ψии истинного курса. Полученное таким образом значение
далее вычитается в седьмом БВ 41 из измеренного значения Ψии истинного курса. Полученное таким образом значение  курса.
курса.

 ≃Ψ является более точным, чем на выходе КС и используется далее для вычисления в ПК 22 проекций путевой скорости на направления
≃Ψ является более точным, чем на выходе КС и используется далее для вычисления в ПК 22 проекций путевой скорости на направления
ЛА - ведущая наземная станция и ЛА - ведомая наземная станция.
В известном техническом решении ошибки вычисления проекций путевой скорости ζ21(t) и ζ31(t) при А=0 и Ψг = π определяются равенствами:
Δζ21= - ζ2 ˙ sin(Ψ - Aт1) ˙ Δ Ψ ,
Δ ζ31= ζ2 [sin(Ψ - Aт1) - sin(Ψ -
- Aт2)] ˙ Δ Ψ .
В предлагаемом измерителе благодаря компенсации ошибки Δ Ψ указанные ошибки вычисления проекций путевой скорости практически отсутствуют, что приводит в конечном итоге к уменьшению ошибок измерения разности дальностей и определяет положительный эффект предлагаемого технического решения по сравнению с известным.
Было выполнено с применением ЦВМ IBM - PS/AT моделирование на его математической модели. Выполненное моделирование показало, что при практической реализации предлагаемого измерителя дисперсия ошибки измерения разности дальностей в 1,5...2 раза меньше, чем в известном устройстве.
Таким образом, введение в известное устройство блоков 33...41 и соответствующих связей позволило выделить и компенсировать медленно меняющуюся ошибку КС и тем самым повысить точность измерения разности дальностей, а следовательно, и более точно определить местоположение ЛА путем измерения разности дальностей до трех наземных станций, а также повысить точность коррекции текущих координат его местоположения, определяемых методом счисления пути, и тем самым снизить расход топливного и энергетического ресурсов ЛА и повысить безопасность полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКСНАЯ СИСТЕМА ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1992 |
|
RU2022297C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ И НАПРАВЛЕНИЯ ГАЗОВОГО ПОТОКА | 1992 |
|
RU2041463C1 |
| Бортовая комплексная система измерения дальности и азимута | 1987 |
|
SU1529951A1 |
| СПОСОБ ПРОВЕДЕНИЯ НАТУРНО-МОДЕЛЬНЫХ ИСПЫТАНИЙ РАДИОЭЛЕКТРОННЫХ СИСТЕМ | 1997 |
|
RU2137193C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ВНУТРЕННЕГО КОНТУРА ТУРБОРЕАКТИВНОГО ДВУХКОНТУРНОГО ДВИГАТЕЛЯ ОТ ПОПАДАНИЯ ПОСТОРОННИХ ПРЕДМЕТОВ | 1992 |
|
RU2045451C1 |
| Комплексная радионавигационная система измерения азимута летательного аппарата относительно радиомаяка | 1986 |
|
SU1398607A1 |
| Система определения курса подвижного объекта | 1986 |
|
SU1385110A1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| Бортовой двухкоординатный радиопеленгатор | 1987 |
|
SU1484105A1 |
| Комплексный измеритель дальности | 1986 |
|
SU1396103A1 |
Сущность изобретения: бортовой измеритель разности дальностей содержит приемную антенну 1, приемник 2, усилитель 3, формирователь характерной точки 4, дискриминаторы 5, 8, сумматоры 6, 9, 21, 24, 28, сглаживающие фильтры 7, 10, перестраиваемые по частоте генераторы 11, 13, фазовые манипуляторы 12, 14, опорный генератор 15, блок поиска 16, блок управления 17, формирователь кодирующих сигналов 18, формирователь стробов 19, блок регулируемой задержки 20, преобразователь 33 составляющих горизонтальной скорости полета летательного аппарата в географические координаты, блоки вычитания 23, 27, 34, 35, 38, 39, 41, фильтры нижних частот 25, 29, 40, умножители 26, 30, 31, 32, делитель 36 и функциональный преобразователь 37. 2 ил.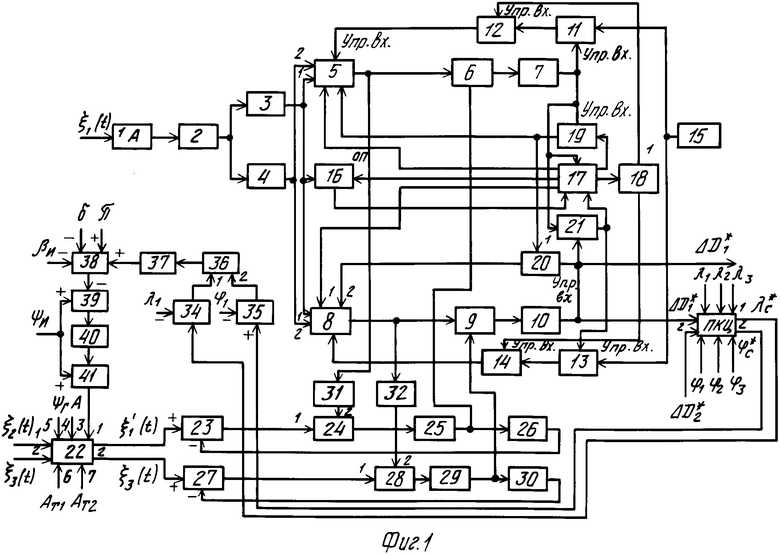
БОРТОВОЙ ИЗМЕРИТЕЛЬ РАЗНОСТИ ДАЛЬНОСТЕЙ ДЛЯ СИСТЕМЫ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, содержащий последовательно соединенные приемную антенну и приемник, а также усилитель, формирователь характерной точки, два дискриминатора, два сглаживающих фильтра, два перестраиваемых по частоте генератора, два фазовых манипулятора, опорный генератор, блок поиска, блок управления, формирователь кодирующих сигналов, формирователь стробов и блок регулируемой задержки, выход приемника соединен через усилитель с входом блока поиска и с первыми входами первого и второго дискриминаторов и через формирователь характерной точки с вторыми входами первого и второго дискриминаторов, выход первого сглаживающего фильтра соединен с управляющими входами первого перестраиваемого по частоте генератора и формирователя стробов и с входом управления задержкой первого строб-импульса блока управления, выход опорной пачки импульсов с измеряемой задержкой которого соединен с опорным входом блока поиска, выход которого соединен с входом сигнала захвата блока управления, выход второго сглаживающего фильтра соединен с управляющим входом блока регулируемой задержки, выход опорной пачки импульсов блока управления соединен с входом формирователя кодирующих сигналов, первый и второй выходы которого соединены с управляющими входами первого и второго фазовых манипуляторов, выход опорного генератора соединен через последовательно соединенные первый перестраиваемый по частоте генератор и первый фазовый манипулятор с управляющим входом первого дискриминатора и через последовательно соединенные второй перестраиваемый по частоте генератор и второй фазовый манипулятор с управляющим входом второго дискриминатора, выходы первого и второго строб-импульсов пачки блока управления соединены с первыми входами стробирования соответственно первого и второго дискриминаторов, выход импульса запуска формирования строб-импульсов слежения блока управления соединен с входом формирователя стробов, выход которого соединен с вторым входом стробирования первого дискриминатора и через блок регулируемой задержки с вторым входом стробирования второго дискриминатора, отличающийся тем, что, с целью повышения точности, введены первый, второй сумматоры, а третий сумматор, преобразователь составляющих горизонтальной скорости полета летательного аппарата из инерциальной системы координат в сферическую систему координат, последовательно соединенные первый блок вычитания, четвертый сумматор, первый фильтр нижних частот и первый умножитель, последовательно соединенные второй блок вычитания, пятый сумматор, второй фильтр нижних частот и второй умножитель, выходы первого и второго умножителей подключены соответственно к вычитающим входам первого и второго блоков вычитания, суммирующие входы которых соединены соответственно с первым и вторым выходами преобразователя составляющих горизонтальной скорости полета летательного аппарата из инерциальной системы координат в сферическую, третий и четвертый умножители, третий и четвертый блоки вычитания, последовательно соединенные делитель, функциональный преобразователь, пятый блок вычитания, шестой блок вычитания, третий фильтр нижних частот и седьмой блок вычитания, выход которого соединен с третьим входом преобразователя составляющих горизонтальной скорости полета летательного аппарата из инерциальной системы координат в сферическую, первый, второй, четвертый, пятый, шестой и седьмой входы которого являются соответственно входами сигналов, пропорциональные составляющим горизонтальной скорости полета летательного аппарата, ортодромическому азимуту гироплатформы, гироскопическому курсу и текущему значению азимута на i-ю наземную станцию, преобразователь гиперболических координат местоположения летательного аппарата в географические координаты, первый вход которого соединен с выходом второго сглаживающего фильтра, а первый и второй выходы соединены соответственно с суммирующими входами третьего и четвертого блоков вычитания, вычитающие входы которых являются входами сигналов, пропорциональные географическим координатам ведущей наземной станции, а выходы соединены с входами делителя, выход первого дискриминатора соединен с первым входом первого сумматора, второй вход которого соединен с выходом первого фильтра нижних частот, а выход - с входом первого сглаживающего фильтра, выход которого соединен с первым входом третьего сумматора, выход второго дискриминатора соединен с первым входом второго сумматора, второй вход которого соединен с выходом второго фильтра нижних частот, а выход - с входом второго сглаживающего фильтра, выход которого соединен с вторым входом третьего сумматора, выход которого подключен к входу управления задержкой второго строб-импульса блока управления и к управляющему входу второго перестраиваемого по частоте генератора, выход первого дискриминатора через третий умножитель соединен с вторым входом четвертого сумматора, выход второго дискриминатора через четвертый умножитель соединен с вторым входом пятого сумматора, при этом второй суммирующий вход пятого блока вычитания, является входом сигнала пропорционального π , а вычитающие входы являются входами сигналов, пропорциональных курсовому углу и углу схождения меридианов, суммирующие входы шестого и седьмого блоков вычитания объединены и являются входом сигнала, пропорционального измеренному значению истинного курса летательного аппарата, второй вход преобразователя гиперболических координат местоположения летательного аппарата в географические координаты является входом сигнала, пропорционального разности дальностей до ведущей и ведомой наземных станций, а остальные входы являются входами сигналов, пропорциональных географическим координатам наземных ведущей и ведомых станций.
| Радиотехнические системы дальней навигации.М.:Воениздат МО СССР, М.1975, с.86-117, рис.16. |
