Изобретение относится к сельскохозяйстве;нному машиностроению, в частносгл к следящил устройствам режущих ашзаратов внноррадоуборочных :Маш;ин.
Следящее устройство режущего аппарата виноградоубО,ро;ч.ной мащ.кны по авт. св. Ло 728770 выключает несущий брус, связанный со ш то ко.м силового гидроцилиндра механизма подъема и опуакан:ия, двухпозиционмый золотниковый гидрораспределитель, подпружиненную Контактную лыжу, связан})yio с плунжером золотникового гидрораспределителя, Компенсатор, щул-лозоподъемя-ик, щарнирно соединенный с контактной лыжей и снабженный двумя связанными между собой располОЖенным.и взаимно перпеидиклуярно параллелограммными механизмами с вертикальными звеньями, раму, снабженную верти1кальной направляющей, в которой размепдено вертикальное звено одного параллелограммного меха 1изма, а вертикальное звено другого выполнено в виде компенсирующего устройства.
Силовой гидрон,илиндр механизма подъема и опускания, двухпозиционный золотн:иковый гидрораспределитель и ко.мпеисатор связаны между собой в единую гидросисте.му. В пронессе копирования шпалерного полога режущий рабоч1ий орган виноградоуборочиой машины соверщает сложные перемещения, которые можно определить как перемещение аппарата по вертикали (подъем и опускание), поворот аппарата вокруг точки консольной подвески (когнирование изменения угла наклона козырькового полога). Вынолнение указанных перемещений осуществляется вследствие уста;:овки на рабочем органе аналогичных следящих устройств, которые, работая независимо одно от , пра,вляют рабочим органом.
Однако строго фиксированное положе)1ие плоскости щупа-лозоподъемника по вертикали, обеспечиваемое механизмом управле 1ия независимо от }тла поворота рабочего органа, не обеспечивает беспрепятственного пронн.кновения и1 па-лозоподъемника среди свобод} о свисающих гроздей, что приводит к излишним воздействиям его на гроз.чи и сказывается на качестве их среза.
Целью нзобретения является повышение качества среза гроздей.
Цель достигается тем, что на параллелограммном механизме с вертнкальными звеньями установлена вилка, а задний конец щупа-лозоподъемника выполнен эластичным и размещен в вилке.
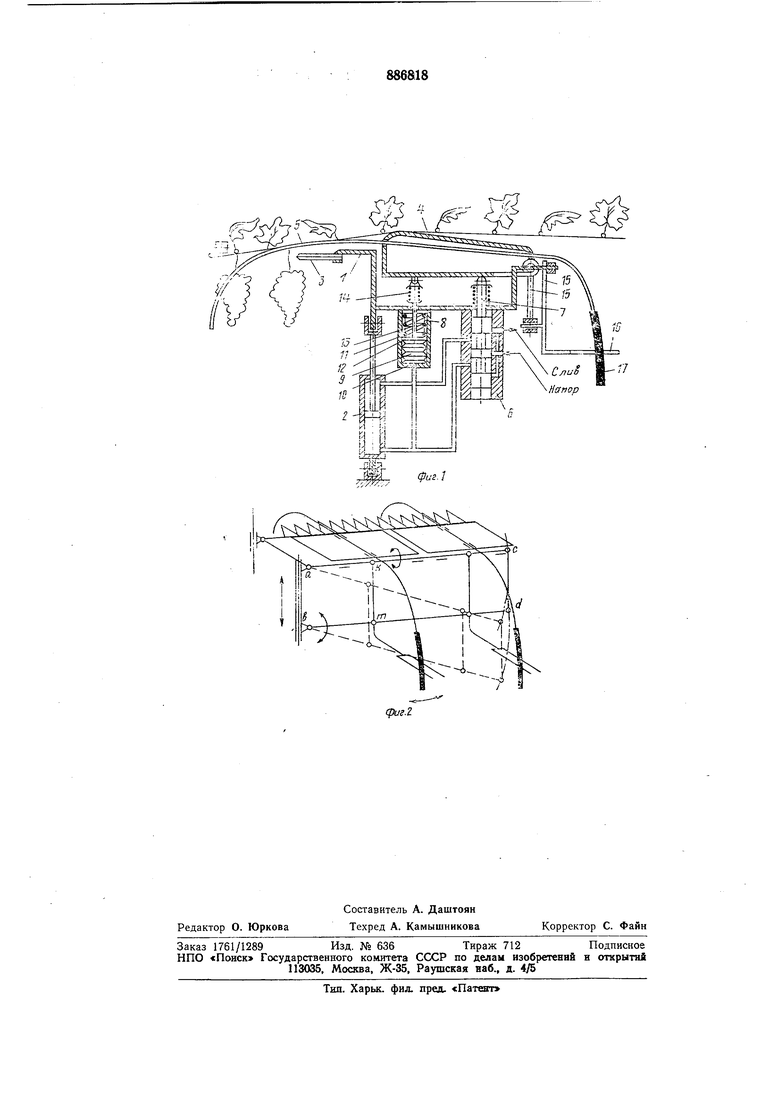
На ф:Иг. 1 изображено следящее устройство режундего аппарата виноградоубоpoiifHofi MaiJiijiibi, общий вид; на t.ir. 2 то же, кинематическая ехема.
Предлагаемое ует.ройегво .Б|Ключаег ,чесущий брус 1, связанный со штоком спло ого глдроциллндра 2 MexaiHiaMa подъема ,и оиуока шгя рабочего органа, режущий аппарат 3, смО;1гги1розанный на несущем брусе, контактную лыжу 4, идуп-лозоподъемник 5, выполненный самоуета1 авлиБаюии Мся относптелыю гроздей в пределах О 30 -.-ла отклонения от продольно зертикальчо плоскостп, з()лотН|Н1Ковый Г11др0|р,аспреде,т;;тель 6 с поднру/.ч.цпенной головкой ил и кера 7, взаимодействующей с контактной лыжей, и компенсатор 8, выполпенпый и в;|де силь(: :10-на 9, Ks pinvcoM 10, снабженного компе 1СИр чоще1 1 нружиной 11. Между сильфоном и :юмен1епа опорная :пластпна 12, связанная через шток 13 и пружину 14 с контактной лыжей. Meханизм управления нупом-лозопоаъемником состоит пз шарми.рпо-лараллелогра.ммпого мехапизма. 1,5 (abdc), сто-ропа аЬ которого является . подвижной отпосптельно вертикальной направляющей, а также вилкн 16, вьтполнеипой сов. с верпиа альпым- звеном km параллелограмма, раеположеппым н п;шскоет н щупа-лозолодд емпика.
ЗаД:НПЙ :копец 17 Щ|упа-лозоподъемпика 5 выпол1не п э.частнчпым.
Устройство работает следующим образолт. Пр.и въезде випоградоу.борочной мащины iB междурядье я включепин тидрошривода ра.бочая жидкость от пасоса подается в д:вух;поЗ|Ицпоп)Пый золотп каковы и лпдрораспределнтель 6. Так -как « этот еще нет солрикосгювения конта-ктной лыж.п 4 п щуша-лозоподъемни ка 5 с поверхноетью козырьковой щпалеры, то контактная лыжа 4 п пдуп-лозоподъемппк 5 подняты вверх иодпружипенной головкой плунжера 7 гидрора;епределителя 6. В та-ком положен)гп плупжер 7 двухпози циомного гидрораопредел(ителя 6 открывает доступ рабочей жидкостп в подпорщиевую полоеть силового ги:дроиилиидра 2. При этом вся система пач;И1нает подниматься к козырько вому пологу. Одновременно с подъемом ножевого бруса 1 давлеНПе из лодпорщиевой полости по трубапроводу подается во впутренпюю полость сильфона 9 KOtM-пенсатора 8 п разжимает его, сЖ|Пм.ая л.ри этом 11. Как только давление в оильфоне 9 уравновеонтея жесткостью пружины 11, перемещение njTOKa 13 компенсатора 8 вверх прекратится, а пружина 1 сожмется, достигнув заданной регулировки жесткосии.
Ьсли перед дзижуп1еися по ряду ма1ни:чоГ встретится -часток с больпшм .количествол гроздей. чем -ла 1гредыдччцем, то давлеп:.1е в 1К)д пор1ниевую полость будет Передано большее, HITOK 13 компенсатора 8 подНИм.аетея в у;ерх и дочолпи-чмьио сожмет II, т. е. 3 маните сила иоджатия .чолога уве,1.чч1ггея 11ро-пориио;ча;1ьно урожаю, вь ра1 ппв;1Я поверхность щпалерпого полога пере.ч ре/кун1им а;1ла)атом 3 до не;и)х;)Д11Мой 15е;1.ччины.
Hji.H козырь.ка npoijjienjero Чолога н,л-лозо ПОДье.мНИК 5 и контактная лыж;; 4 под ..ействием на1рузки иа них ои чтятся зн.из, л .результате чего ллунже;) 7 золотппкоВОГо гидрораогределителя (i переместится вн.из п перераогределит направ.leHHc потока рабочей /кидкостн в еиловом гид,роипл1 ндре 2.
Уирав;1е ие положением плоскости щ;,па-лозоп()Д1)емппка Г) относ.ителыю рабочего органа осучдествляется автоматически посредством йилК.и 16, вытюлпенной совместно с вертикальным звечом km паралле;101раммного механизма ubdc, об)аз{)ваппого брусом ас, ползуном аЬ, тягой bd и вер1Ч1кал)Ньгм звеном al. 11()скольку но.лзуи ао находится всегда i; вертикальном положеifHii, то 1езавиеимо от гла поворота пее щего бруса ас, вертикальные звенья cd и km б .утут всегда на)аллельны ползун} аЬ, т. е. щуп-лозоподъемнг1к 5 будет сориенти)()ван отпосггельно .продольной верти.кальпой п.чоекости. а спет -j.iricininiior) K.jiiii,-; 7 П1у1П-лозоподъем П1к самохстапа вливается относительно гроздей в пределах О-30 тла отклО1 е П Я от продольной вертикальной плоскости.
Иснользава1ние изобретения позволит
качество среза виноградных
подвысить гроздей.
Ф о ) м - л а и 3 обре т е п п я
Следящее устройство режущего аппарата випоградоубороч-ной машины тго авт. св. Ло 728770, о т л иЧ а ю щ е е с я тем, что, с целью повыщения качества среза гроздей, на параллелограммно м механ-изме с вертикальнымп звенья.ми устаиовлена вилка, а задпий конеп щупа-лозоподъеМП.ика выполнен эластичным и размещ&н в вилке.
Источн-ик ипформапии, принятый во |ВИ 1мапие пр.и экспертизе:
1. Авторское свидетельство СССР ДЬ 728740, кл. А 01 D 46/28, 1979.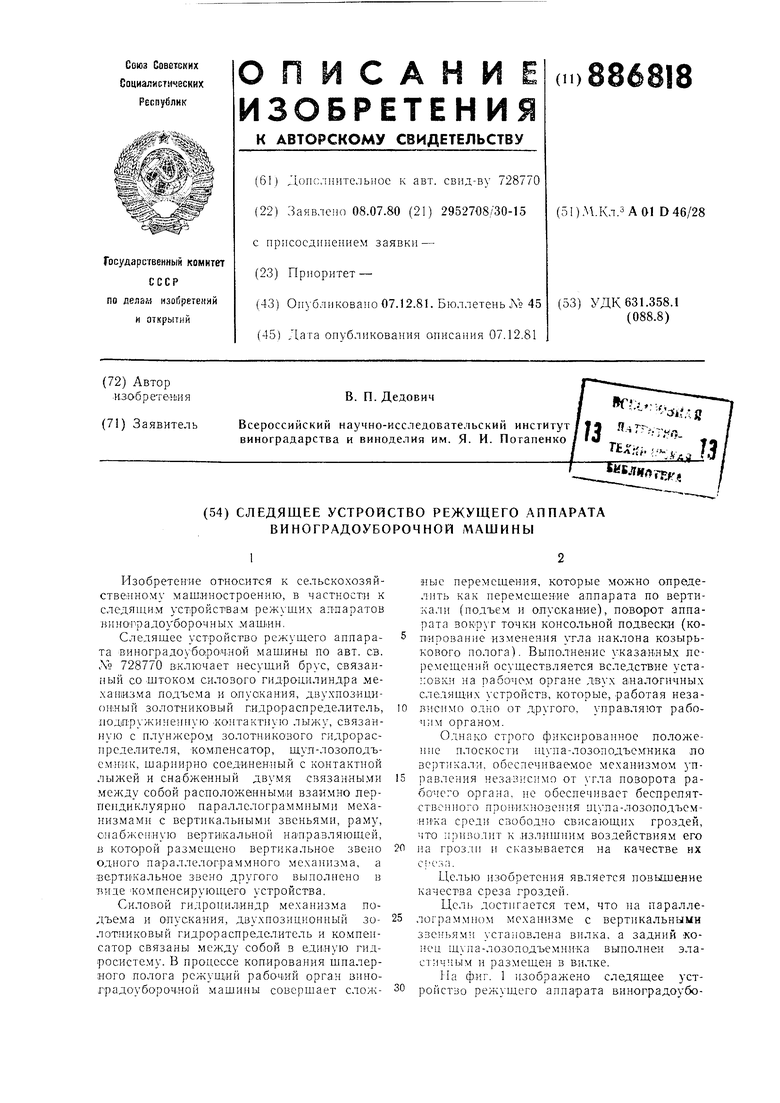
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящее устройство режущего аппарата виноградоуборочной машины | 1982 |
|
SU1056951A2 |
| Следящее устройство режущего аппарата виноградоуборочной машины | 1977 |
|
SU728770A1 |
| Следящее устройство режущего аппарата виноградоуборочной машины | 1976 |
|
SU562243A2 |
| Следящее устройство режущего аппарата виноградоуборочной машины | 1982 |
|
SU1017210A2 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО РЕЖУЩЕГО АППАРАТА ВИНОГРАДОУБОРОЧНОЙ МАШИНЫ | 1969 |
|
SU251992A1 |
| ВИНОГРАДОУБОРОЧНАЯ МАШИНА | 1970 |
|
SU287454A1 |
| ОРУДИЕ ДЛЯ ВНУТРИРЯДНОЙ ОБРАБОТКИ ПОЧВЫ В ПЛОДОВОМ САДУ | 2011 |
|
RU2462014C1 |
| Режущий аппарат | 1986 |
|
SU1362416A1 |
| Ягодоуборочная машина | 1989 |
|
SU1727672A1 |
| Машина для чеканки виноградной лозы | 1989 |
|
SU1660630A1 |