1
Изобретение относится к области сельскохозяйственного машиностроения, в частности к устройствам для разделения стеблевой массы, преимущественно зеленого гороха, для подачи ее на другие машины илиП 5 узлы.
Известен рабочий орган устройства для разделения стеблевой массы, включающий транспортную ленту с захватывающими пальцами, неподвижно соединенными с ос- Ю нованием и взаимодействующими с очищающим элементом 1.
Недостатком известного устройства является ненадежный захват стеблей, неспособность захватывать стебли, сориентирован- 15 ные :пальцами вдоль их движения, а также невозможность захвата мелких фракций.
Цель изобретения - повышение очистки пальцев.
Указанная цель обеспечивается тем, что 20 очищающий элемент выполнен в виде лланки с щелью и противовесом, одним концом шарнирно соединенной с основанием захватывающих пальцев, размещенных в упомянутой щели, а также тем, что захватываю- 25 щие пальцы выполнены в виде чередующихся разновеликих выступов и впадин клиновидной формы.
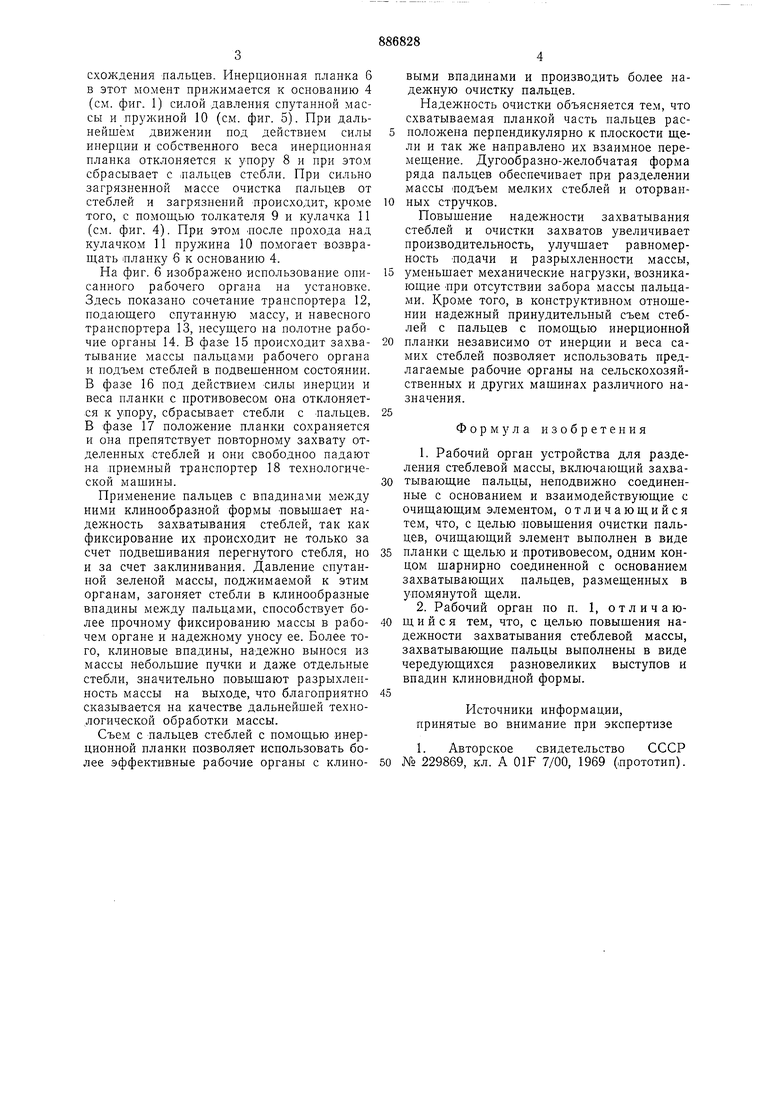
На фиг. 1 изображен рабочий орган устройства для разделения стеблевой массы; 30
на фиг. 2 - то же, вид сверху; на фиг. 3 - то ж&, аксонометрия; на фиг. 4 - то же, при использовании с другими рабочими органами; на фиг. 5 - то же, вид сверху; на фиг. 6 - то же, аксонометрия.
Рабочий орган состоит из дугообразного желобчатого гребня 1 с захватывающими пальцами 2 и расположенными ними укороченными пальцами 3, клинообразно сходящимися между собой у основания. Гребень 1 неподвил но соединен с основанием 4, к которому с ПОМОЩЬЮ шарнира 5 крепится очищающая инерционная планка 6 с противовесом 7 и щелью, охватывающей гребень 1. Неподвижно в основании укреплен упор 8 для ограничения хода планки 6.
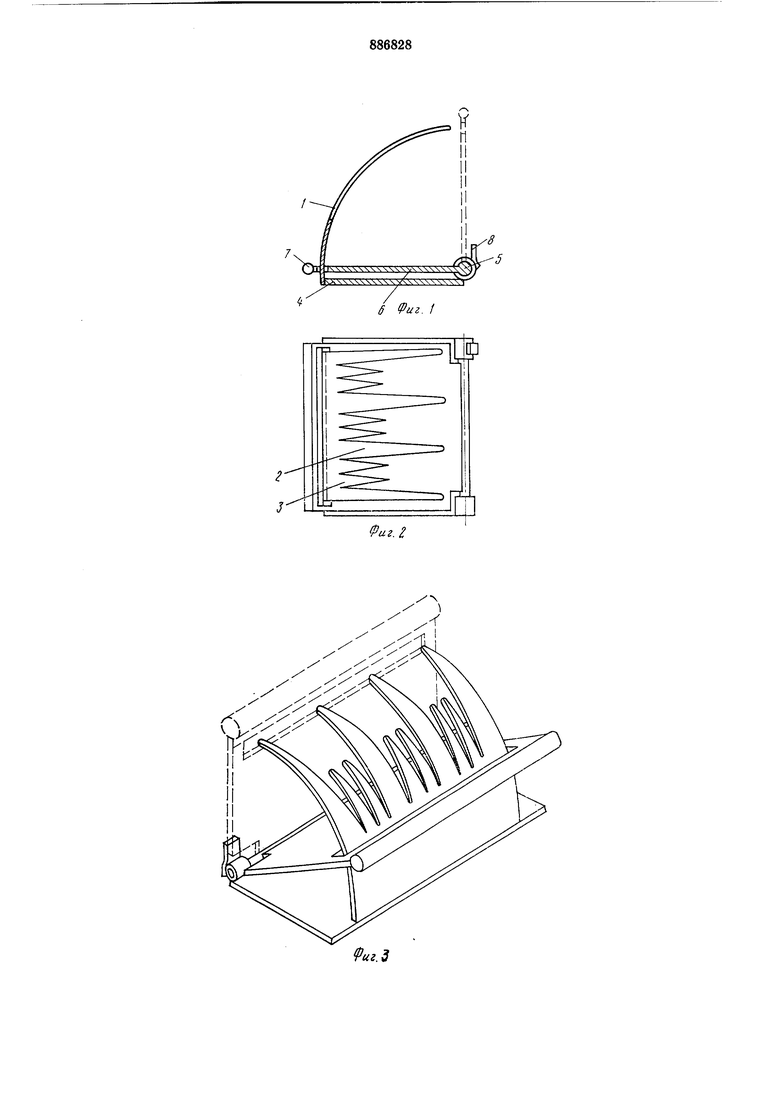
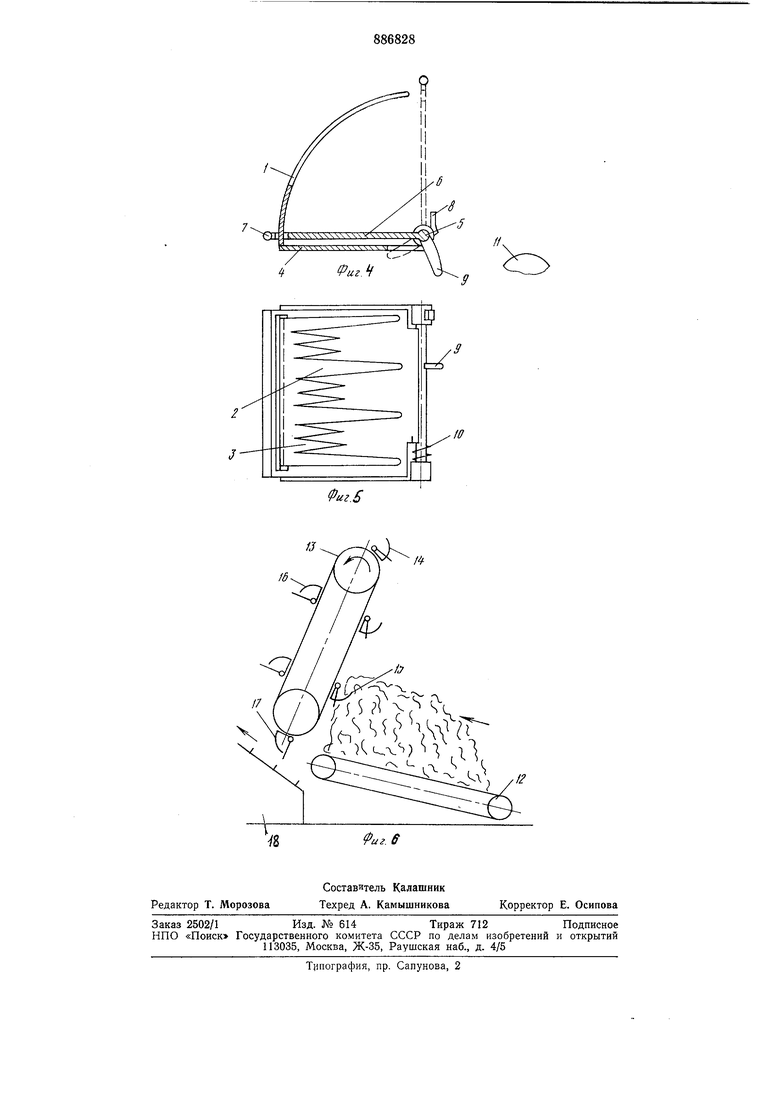
Вариант исполнения рабочего органа лЧля особо загрязненной массы поясняется фиг. 4, 5. Рабочий орган дополнительно оснащен толкателем 9, неподвин но прикрепленным к инерционной планке 6, и возвратной пружиной 10, служащими для принудительного поворота планки 6 при контакте с кулачком И.
Работа осуществляется следующим образом.
При контакте рабочего органа со стеблевой массой происходит захватывание стеблей пальцами 2 и заклинивание их в месте
схождения пальцев. Инерционная планка 6 в этот момент прил :имается к оспованию 4 (см. фиг. 1) силой давления спутанной массы и пружиной 10 (см. фиг. 5). При дальнейшем движении под действием силы иперции и собственного веса инерционная планка отклоняется к упору 8 и при этом сбрасывает с .пальцев стебли. При сильно загрязненной массе очистка пальцев от стеблей и загрязнений происходит, кроме того, с помощью толкателя 9 и кулачка И (см. фиг. 4). При этом После прохода над кулачком 11 пружина 10 помогает возвращать 1планку б к основанию 4.
На фиг. 6 изображено использование описанного рабочего органа на установке. Здесь показано сочетание транспортера 12, подающего спутанную массу, и навесного транспортера 13, несущего на полотне рабочие органы 14. В фазе 15 происходит захватывание массы пальцами рабочего органа и подъем стеблей в подвешенном состоянии. В фазе 16 под действием силы инерции и веса планки с противовесом она отклоняется к упору, сбрасывает стебли с пальцев. В фазе 17 положение планки сохраняется и она препятствует повторному захвату отделенных стеблей и они свободноо падают на .приемный транспортер 18 технологической машины.
Применение пальцев с впадинами между ними клинообразной формы повышает надежность захватывания стеблей, так как фиксирование их происходит не только за счет подвешивания перегнутого стебля, но и за счет заклинивания. Давление спутанной зеленой массы, поджимаемой к этим органам, загоняет стебли в клинообразные владины между пальцами, способствует более прочному фиксированию массы в рабочем органе и надежному уносу ее. Более того, клиновые впадины, надежно вынося из массы небольшие пучки и даже отдельные стебли, значительно повышают разрыхленпость массы на выходе, что благоприятно сказывается на качестве дальнейшей технологической обработки массы.
Съем с пальцев стеблей с помощью инерционной планки позволяет использовать более эффективные рабочие органы с клиновыми впадинами и производить более надежную очистку пальцев.
Надежность очистки объясняется тем, что схватываемая планкой часть пальцев расположена перпендикулярно к плоскости щелн и так же направлено их взаимное перемещение. Дугообразно-желобчатая форма ряда пальцев обеспечивает при разделении массы Подъем мелких стеблей и оторванных стручков.
Повышение надежности захватывания стеблей и очистки захватов увеличивает производительность, улучшает равномерность -подачи и разрыхлениости массы,
уменьшает механические нагрузки, возникающие При отсутствии забора массы пальцами. Кроме того, в конструктивном отношении надежный принудительный съем стеблей с пальцев с помощью инерционной
планки независимо от инерции и веса самих стеблей позволяет использовать предлагаемые рабочие органы на сельскохозяйственных и других машинах различного назначения.
Формула изобретения
1.Рабочий орган устройства для разделения стеблевой массы, включающий захватывающие пальцы, неподвижно соединенные с основанием и взаимодействующие с очищающим элементом, отличающийся тем, что, с целью повыщения очистки пальцев, очищающий элемент выполнен в виде
планки с щелью и противовесом, одним концом щарнирно соединенной с основанием захватывающих пальцев, размещенных в упОМяиутой щеЛИ.
2.Рабочий орган по п. 1, отличающ и и с я тем, что, с целью повышения надежности захватывания стеблевой массы, захватывающие пальцы выполнены в виде чередующихся разновеликих выступов и впадин клиновидной формы.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 229869, кл. А GIF 7/00, 1969 (лрототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Питатель стебельной массы | 1981 |
|
SU1015854A1 |
| Подающее устройство молотилки | 1977 |
|
SU904545A1 |
| Универсальный раздатчик | 1980 |
|
SU891022A1 |
| Рабочий орган кормораздатчика | 1984 |
|
SU1205817A1 |
| Рабочий орган раздатчика кормов | 1984 |
|
SU1242043A1 |
| КОРМОРАЗДАТЧИК | 1999 |
|
RU2146086C1 |
| Комбайн для среза стеблей кукурузы, отделения и очистки початков и измельчения листостебельной массы | 1958 |
|
SU128680A1 |
| СПОСОБ УБОРКИ ГОРОХА ПРЯМЫМ КОМБАЙНИРОВАНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096942C1 |
| СПОСОБ УБОРКИ ВЫСОКОСТЕБЕЛЬНЫХ ЛУБЯНЫХ КУЛЬТУР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2814555C1 |
| КОРМОРАЗДАТЧИК | 2000 |
|
RU2178639C1 |
х.
