1
Изобретение относится к строительной индустрии, в частности к технологическому оборудованию, предназначенному для изготовления Строительных изделий.
Известна виброударная установка для формования строительных изделий, состоящая из ПОДВИЖНОЙ .площадки, установленной посредством пружин на основании, опор для создания удара ;подвижной .площадки, и расположенных лод этой площадкой механизма для вертикальных перемещений площадки, и средств для крепления формы на подвижной площадке 1.
Недостатком известной установки является ее недостаточная технологичность.
Цель изобретения - повыщение технологических возможностей установки - формование -на ней изделий тремя разными прогрессивными Способами - ударным, ударно-инерционным и ударно-вибрационным, увеличение производительности и сокращение производственной площади.
Поставленная цель достигается тем, что виброударная установка для формования строительных изделий снабжена порталом с наПравляющими, установленными на ее стойках, поворотными цилиндрами для перемещения формы, щарнирно-смонтированными на портале, и вибраторами, жестко за-крепленными на боковых гранях подвижной площадки, причем механизм вертикальных перемещений этой площадки выполнен в виде тросо-блочной системы, один конец которой соединен со средством крепления
5 формы, а другой - посредством толкателя с поворотным копиром.
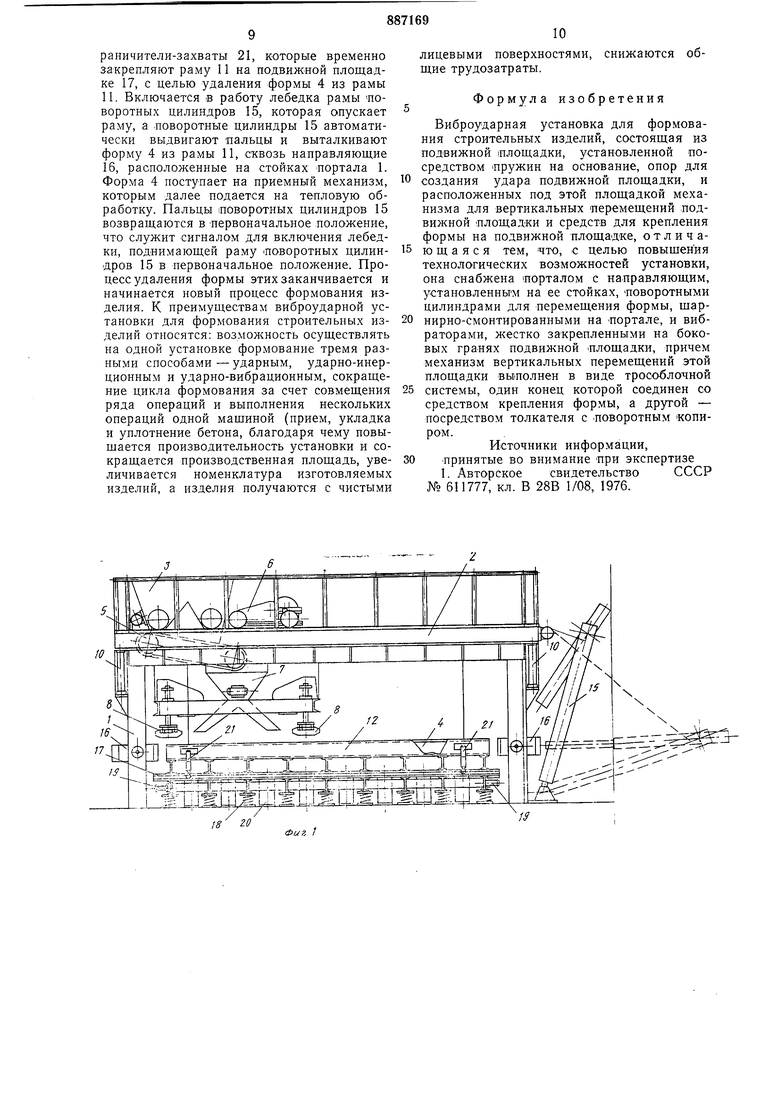
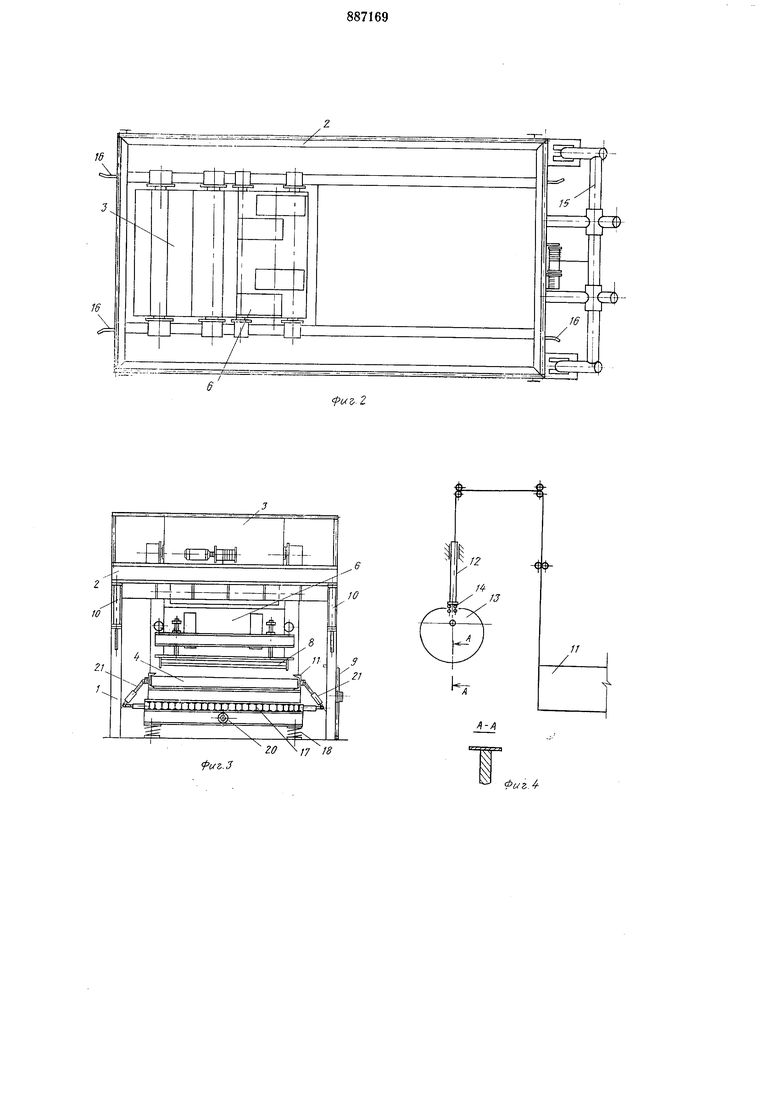
Па фиг. 1 изображена предлагаемая установка, общий вид; на фиг. 2 - то же, вид в плане; на фиг. 3 - то же, вид с тор10 ца; на фиг. 4 - то же, механизм подъема
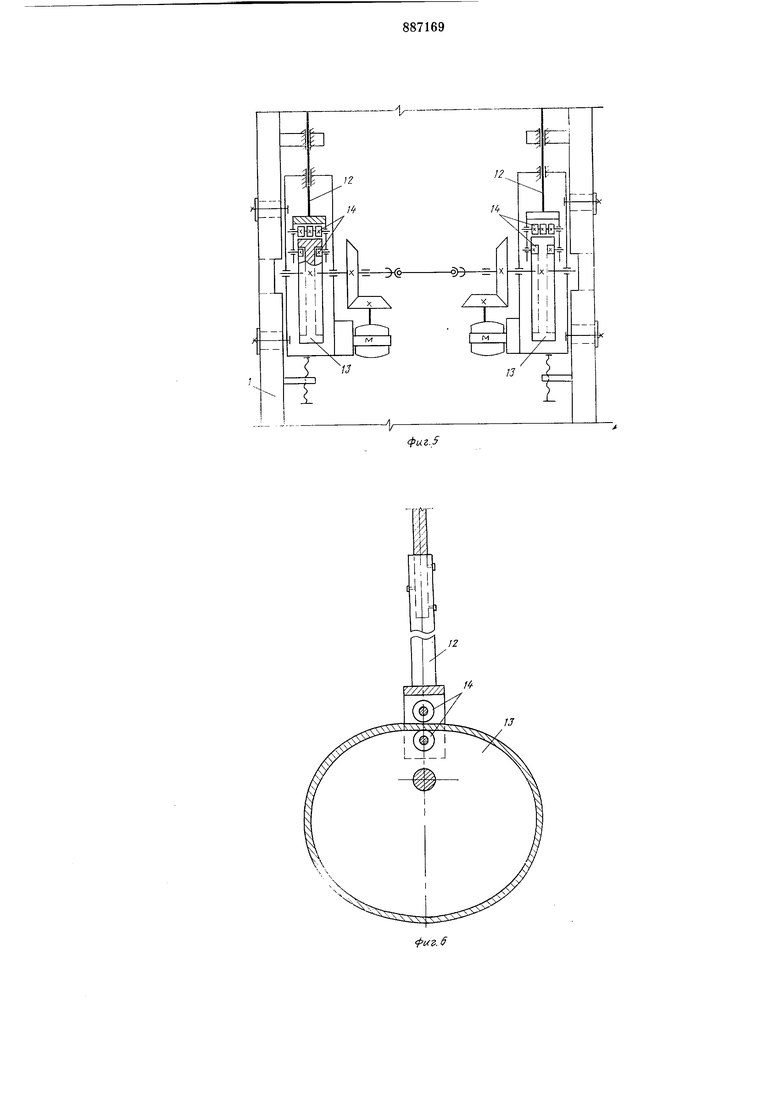
платформы; на фиг. 5 - то же, механизм
синхронизации; на фиг. 6 - то же, копир
механизма подъема платформы.
Виброударная установка для формования
15 строительных изделий представляет со-бой стационарную мащину, одной из частей которой является портал 1. На портале 1 и под ним смонтированы остальные части установки. Вверху портала 1 расположена
20 горизонтальная рама 2, на которой смонтирован самоходный бункер 3 для приема бетона и подачи его для укладки в формы 4. Бункер 3 передвигается на роликах по рельсовому пути вдоль горизонтальной рамы 2 и оснащен ленточным питателем 5, подвешенным наклонно так, что его приводной барабан расположен ниже натяжного. Питатель 5 имеет привод 6, закрепленный на горизонтальной раме 2. Наклонная
30 подвеска питателя обеспечивает стекание цементного молока и частичек бетонной смеси, проникающих на наружные кром-ки ленты через уплотнение мелсду лентой литателя 5 и стенками бункера 3 в направлении выдачи бетонной смеси. Стены бункера 3 облицованы листовым иолиэтиленом или пропиленом, благодаря чему бетон полностью опорожняется и из конструкции бункера 3 исключены вибраторы. Заслонка бункера 3 открывается и закрывается с иомощью ииевмоцилиндра. Бункер 3 выдает бетонную смесь в вибронасадок 7, подвещеиный под ним на канатах. Подъем-опускание вибронасадка 7 производится приводом лебедочного типа. С целью снижения уровня шума, генерируемого вибронасадком 7 во время работы, на последнем установлен только один вибратор, который обеспечивает нормальное распределение бетонной смеси по ширине формы 4. К вибронасадку 7 подвешен заглаживающий брус 8, который может совершать возвратно-поступательные движения в направлении, иерпендикулярном движению бункера 3. Работа виброиасадка 7 и заглаживающего бруса 8 может осуществляться как одновременно, так и раздельно в любой последовательности. С этой целью от специального привода (Предусмотрена установка заглаживающего бруса 8 относительно рабочей поверхности вибронасадка 7 (в вертикальпом направлении), как в одной горизонтальной плоскости (для одновременной их работы), так и выше (для работы только одним .вибронасадком 7) или ииже (для работы одним заглаживающим брусом 8). Для получеиия чистой и ровной иоверхности изделия предусмотрено устройство 9 для орошения формы 4 водой. Горизонтальная рама 2 портала 1, на которой смонтированы механизмы для приема и укладки бетона: бункер 3, питатель 5, привод питателя 6, вибронасадок 7 и заглаживающий брус 8, с ПОМОЩЬЮ гидроцилиндров 10 может подниматься вверх и опускаться в первоначальное положение. Электрическая схема установки выполнена таким о-бразом, что механизм вертикальных перемещений формы 4 и ее рамы 11, расположенный внутри портала 1, включаться только при верхнем положении горизонтальной рамы 2, так как при нижнем положении горизонтальной рамы 2 он заблокирован, во избежание удара формы 4 и ее рамы 11 об элементы бетонораопределительных механизмов. Механизм вертикальных перемещений формы 4 и ее рамы 11 состоит из толкателей 12 (минимум из четырех), взаимодействующих с таким же количеством поворотных копиров 13, их приводов и трособлочных систем. Поворотные копиры 13 представляют собой металлические лластины из толстолистовой стали, имеющие форму улитки Паскаля, обрамленные но периметру металлическими ребордами из полосовой стали, образующими « общем сечении с пластинами двутавры. Изолированные центры улиток Паскаля являются одновременно центрами вращения поворотных копиров 13, валы которых приводятся во вращение специальными, синхронно работающими ириводами. Синхронизация работы приводом осуществляется с помощью конических щестерен и карданных валов, расположенных в двух взаимно перпендикулярных направлениях. Реборды поворотных копиров 13 охватываются с каждой стороны двумя парами роликов 14, оси которых соединены между собой щеками-накладками, подсоединенными жестко к толкателям 12. При вращении поворотных копиров 13 обрамляющие их ролики 14 -принуждают толкатели 12, двигающиеся в направляющих, закрепленных на портале 1, совершать возвратно-поступательные движения в вертикальной плоскости. К каждому толкателю 12, с другой стороны, прикреплен один конец каната, который огибает систему специальиых парных роликов, мешающих соскакиванию каната с роликов. Второй конец каната закреплен на карабине, с помощью которого подсоединяется к раме 11 формы 4. Такое подсоединение канатов к раме 11 позволяет быстро заменять раму 11 одной конфигурации на другую. Направляющие ролики для канатов, входящие в механизм вертикальных перемещений формы 4 и ее рамы 11, крепятся на внутренних вертикальных стенках портала 1. Поворотные копиры 13 вместе с их приводами и толкателями 12 находятся в закрытых кожухах, которые могут с помощью щтурвалов домкратных приспособлений перемещаться вверх или вниз, скользя по направляющим, расположенным на стойках портала 1. Этим достигается возможность изменения величины хода рамы 11 с формой 4, регулирования длины канатов в случае их неравномерного растяжения. Рама 11 формы 4 является сменным и ее конфигурация зависит от конфигурации формуемого изделий, а следовательно, формы 4. Папример, для изготовления плоских бетонных или железобетонных изделий рама И, в которой находится форма 4, состоит из двух параллельных щвеллеров, соединенных между собой снизу прочными металлическими связями в нескольких местах. Перед формованием в раму 11 проталкивается форма 4 с бетонной смесью. Расстояние между внутренними частями стенок щвеллеров, составляющих раму И, в горизонтальной плоскости несколько больще ширины формы 4, а по высоте, между внутренними габаритами полок щвеллеров, свободно размещаются борта формы 4. Принятые зазоры необходимы для прохода формы 4 в ее раму 11 без особых усилий. Рама 11 предохраняет форму от повреждеНИИ во время формования. Для заталкивания формы внутрь рамы 11 пли выталкивания формы из рамы 11 служат шарнирно смонтированные на портале 1, новоротные цилиндры 15, нредставляющие собой нодъемно-01нускную раму, снабженную выдвижнЕ гми тальцами-гидроцилиндрами. Подъем опускание поворотных цилиндров 15 осуществляется канатом от нривода лебедочного типа, закрепленного на портале 1.
На стойках портала 1 с обоих торцов размещаются направляющие 16 формы 4. На правляющие 16 могут сдвигаться, или раздвигаться с помощью штурвалов, в зависимости от щирины формы и служат для сообщения форме 4 направления при входе формы в раму И или выходе из нее. Внизу портала 1, в центральной части, расположена массивная металлическая подвижная площадка 17, опирающаяся носредством .пружинных виброизоляторов 18 на основание, которым служит рассчитанный на динамические воздействия фундамента, изолированный от фундамента портала 1. На боковых гранях по торнам потвижной площадки 17 жестко закреплены вибоатопы 19, при включении которых площадка 17 приобретает резонансные колебания. Пол потвижной площалкой 17 нахотится механизм 20 для вертикальных пеоемептеиий этой площадки, претставляющий собой опоры из ГИДРОНИЛИНтров, связанные в одну общую систему. При подъеме механизма 20 поднимает ПОДВИЖНУЮ площадку 17 таким образом, что потвижная |площадка 17 ОПИрается на опоры 19, а не на пружинные виброизоляторы 18. На подвижной площ.адке 17 смонтированы пневматически действующие от-ряничители-прихваты 20. претнязначенные для впеменного кпепления оямы И к повиЖНо п.гтощатке 17. Это нео отимп в случае заталкиваний формы в РЯМУ 11 или выталкивания сЬопмы из рамы И. Все управление установкой осуществляется дистаниионно, автоматизированно. и может программироваться, однако, при необходимости может включаться дублирующее кнопочное управление отдельных узлов и всей установки в целом. Весь цикл работы установки состоит из четырех основных операпий: подачи формы в зстановку, укладку бетона в Лорму формирования изделия и удаления формы из установки.
Работа виброударной установки tno основным операциям осуществляется следующим образом.
I. Подача формы в установку
Чистая и смазочная форма 4 с уложенными в нее арматурными сетками и каркасами -поступает на какое-либо подающее устройство. Каждый новый цикл формования изделий может быть начат только тогда, когда форма будет полностью введена в
раму 11 установки. Первоначальное частичное заталкивание формы в раму 11 производится каким-либо подающим устройством, распололсенным перед установкой. ТаКИМ подающим ycтpoйcтвo может быть приводной рольганг, подающий конвейер со специальными упорами, толкатель и т. д. Направляющие 16, расположенные в торцах портала 1, предварительно регулируются
щтурвалами и устанавливаются в заданное по щирине формы 4 положение, направляя находящейся между ними формы, строго в сторону рамы 11. Рама 11 в это время готова к приему формы 4, так как
временно закреплена на -подвижной площадке 17 прихватами 21. Это происходит потому, что после окончания формования изделия во время предыдущего цикла рама 11 с формой была схвачена прихватами 21
и закреплена на подвижной площадке 17, для того чтобы форма могла быть вытолкнута из рамы 11 поворотными цилиндрами 15 «а приемное устройство, аналогичное подающему. Этим собственно и заверщился
полностью предществующий цикл.
Упомянутые подающее и приемное устройство не входят в виброударную установку, так как комплектуют всю линию изготовления и поэтому подробно не рассматриваются. Включается привод лебедки, установленной на портале 1 подъемно-опускной рамы поворотных пилиндров 15, рама опускается, включаются поворотные цилиндры 15, нальпьт -которых заталкивают форму 4 в ее раму 11 до конца. После этого поворотные цилиндры 15 выключаются, а их подъемно-опускная рама возвращается приводом лебедки в первоначальное положение.
II. Укладка бетона в форму
Устройство 8 для орощения во той формы 4 смачивает последнюю для создания во-дяной пленки. К этому времени бетонная
смесь, поданная самоходными бадьями или с номощью крана заполняет бункер 3 установки. Горизонтальная рама 2 портала 1 с помощью гидроцилиндров 10 опускается, бункер 3 начинает перемещаться вдоль установки вперед и назад одновременно от-крываются с помощью пневмоцилиндров заслонки бункера 3 и бетонная смесь ноступает па ленточный питатель 5, работающий от привода 6. Бетонная смесь далее поступает в вибронасадок 7, откуда попадает в форму 4, где частично уплотняется и заглаживается заглал ивающим брусом 8. В период укладки бетона работа вибронасадка 7 и заглаживающего бруса 8 может осуществляться как совместно, так и раздельно, в любой последовательности, а бункер 3 может двигаться вперед или назад.
После окончания укладки бетона в форму 4 бункер 3, вибронасадок 7, нитатель 5 с
приводом 6 и заглаживающийся брус 8 выключаются, горизонтальная рама 2 портала 1 с помощью гидроцилинлров 10 Поднимается, а -прихваты 21 освобождают раму 11 с формой 4, благодаря чему их связь с подвижной Площадкой 17 полностью нарушается. Может Начаться процесс формования.
III. Формование изделий
Включается в работу механизм вертикальных перемещений рамы 11, внутри которой находится форма 4. Приводы поворотных копиров 13, связанные между собой в двух взаимно пер пендикулярных направлениях коническими шестернями и карданными валами, синхронизируют вращение поворотпых ко1пиров 13. На фиг. 4 дана кинематическая схема синхронизации приводом, но, чтобы не затемнять схемы, карданные валы, направленные лернендикулярно плоскости схемы, условно не показаны. Начинают вращаться поворотные колиры 13, которые воздействуют через ролики 14 на толкатели 12, заставляя их совершать возвратно--постуоательные движения вверх и вниз. Толкатели 12, скользя в направляющих, при работе то -поднимаются, то опускаются вместе с закрепленными на них канатами и, тем самым, то поднимают, то опускают, подвещенную на канатах с помощью карабинов, раму И с формой 4, заполненной бетоном.
При каждом опускании рамы 11 с формой 4, благодаря -небольшой слабине канатов, на которых рама 11 подвешена, происходит соударения рамы И и находящейся в ней формы 4 -с массивной подвижной площадкой 17.
Изменение хода рамы 11 с формой 4 предварительно, в соответствии с принятым режимом, регулируются щтурвалами домкратных приспособлений, связанных с кожухами, в которых находятся копиры 13 с приводами и толкателями 12. Указанные кожухи передвигаются вдоль направляющих, располол енных на стойках портала 1. Регулировкой хода рамы И регулируются удары в пределах от ударов рамы 11 с формой -по подвижной площадке 17 одним касанием, -сильных ударов, с регулируемой паузой, в период которой рама 11 с формой находится на подвижной -площадке 17.
Когда механизм 20 для вертикальных перемещений /подвижной площадки 17 включен, его опоры рпущены и подвижная площадка 17 опирается непосредственно на пружинные виброизоляторы 18, а через них - на фундамент подвижной -площадки 17. При включении механизма 20 для вертикальных перемещений подвижной площадки 17, гидроцилиндры-опоры механизма 20 выдвигаются и приподнимают подвижную площадку 17 над пружинными виброизоляторами 20. Опоры-гидроцилиндры механизма 20 смонтированы жестко на фундаменте подвижной площадки 17, изолированно от фундамента .портала I.
На виброударной установке можно осуществлять формование изделий следующими тремя прогрессивными способами:
1.Ударно-инерционным способом.
2.Ударно-вибрационным способом.
3.Ударным способом (шок-способом).
Переход с -одного способа формования на другой осуществляется практически немедленно, простым включением вибраторов 19 или механизма 20 вертикальных перемещений площадки 17.
Ударно-инерционный способ формования изделий происходит при выключенном механизме 20 для вертикальных перемещений подвижной площадки 17. При работе механизма вертикальных перемещений рамы 11, она вместе с формой 4, находящейся в ней, совершает вертикальные перемещения вверх и вниз и соударяется с подвижной площадкой 17, опирающейся на основание с -помощью пружинных виброизоляторов 18. Пружинные виброизоляторы 18, воспринимают удар, производимой рамой 11 по -подвижной площадке 17, несколько смягчают его и одновременно способствуют возникновению у подвижной площадки 17
инерционных колебаний в вертикальной плоскости.
Ударно-вибрационныГт способ формования изделий происходит, если включить дополнительно в работу вибраторы 19. При
этом подвижная площадка 17 получает собственные вибрации в резонансном режиме от вибраторов 19, закрепленных на ней жестко -по торцам и одновременно воспринимает удары по ней рамой 11 с формой 4
и передает эти удары и вибрации на пружинные виброизоляторы 18, на которые опирается.
Ударный способ формования изделий (шок способ) - осуществляется -при выключенных вибраторах 19 и включенном механизме 20 вертикальных перемещений подвижной площадки 17. В этом случае подвижная Площадка 17 опирается на опоры-гидроцилиндры механизма 20 и воспринимает удары по ней рамы II с формой 4 внутри. Опоры-гидроцилиндры механизма 20 частично смягчают жесткие удары, передающие на них через подвижную площадку 17 и передают эти удары на виброизолированный фундамент.
IV. Удаление формы из уста} овкн
По окончании формования по одному из описанных выше способов, длительность которых определяется для каждого вида изделий экопериментальным путем, механизм вертикальных перемещений рамы 11 вклю-. чается и она ложится на подвижную площадку 17. Включаются пневматические ограничители-захваты 21, которые временно закрепляют раму 11 на подвижной площадке 17, с целью удаления формы 4 из рамы И. Включается в работу лебедка рамы поворотных цилиндров 15, которая опускает раму, а .поворотные цилиндры 15 автоматически выдвигают пальцы и выталкивают форму 4 из рамы 11, сквозь направляющие 16, расположенные на стойках портала 1. Форма 4 поступает на приемный механизм, которым далее подается на тепловую обработку. Пальцы поворотных цилиндров 15 возвращаются в первоначальное положение, что служит сигналом для включения лебедки, поднимающей раму поворотных цилиндров 15 в первоначальное положение. Процесс удаления формы этих заканчивается и начинается новый процесс формования изделия. К преимуществам виброударной установки для формования строительных изделий относятся: возможность осуществлять на одной установке формование тремя разными способами-ударным, ударно-инерционным и ударно-вибрационным, сокращение цикла формования за счет совмещения ряда операций и выполнения нескольких операций одной мащиной (прием, укладка и уплотнение бетона, благодаря чему повыщается производительность установки и сокращается производственная площадь, увеличивается номенклатура изготовляемых изделий, а изделия получаются с чистыми
лицевыми поверхностями, снижаются общие трудозатраты.
Формула изобретения
Виброударная установка для формования строительных изделий, состоящая из подвижной площадки, установленной посредством Пружин на основание, опор для создания удара подвижной площадки, и располол енных под этой площадкой механизма для вертикальных перемещений подвижной площадки и средств для крепления формы на подвижной площадке, отличаю щ а я с я тем, что, с целью повыщения технологических возможностей установки, она снабжена порталом с направляющим, установленньгм на ее стойках, поворотными цилиндрами для перемещения формы, шарнирно-смонтированными на портале, и вибраторами, жестко закрепленными на боковых гранях подвижной площадки, причем механизм вертикальных перемещений этой площадки вьиполнен в виде трособлочной
системы, один конец которой соединен со средством крепления формы, а другой - посредством толкателя с поворотным копиром.
Источники информации, принятые во внимание При экспертизе 1. Авторское свидетельство СССР № 611777, кл. В 28В 1/08, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формования многослойных железобетонных изделий | 1984 |
|
SU1152790A1 |
| Бетоноукладчик | 1982 |
|
SU1011384A1 |
| Бетоноукладчик | 1982 |
|
SU1066819A1 |
| Устройство для производства железобетонных изделий | 1982 |
|
SU1100100A1 |
| Бетоноукладчик | 1990 |
|
SU1736711A1 |
| Бетоноукладчик | 1987 |
|
SU1447683A1 |
| Бетоноукладчик | 1978 |
|
SU1006237A1 |
| БЕТОНОУКЛАДЧИК | 1996 |
|
RU2165848C2 |
| Бетоноукладчик | 1978 |
|
SU763105A1 |
| Бетоноукладчик | 1984 |
|
SU1230853A2 |
-И-Ч-I-Fi;::
I
//
niirillTIIIlIIITTTrEz
го /7 /
фиг..З
/2 /4
/J
//
/
Фиг..
А
