1
Изобретение относится к автоматике и вычислительной технике и может |быть использовано для контроля перемещения или счета движущихся объектов в тех случаях, когда необходимо различать направление их движения.
По основному авт.св. № 8089 0 известен дискретный датчик перемещения, содержащий формирователи путевых сигналов, ключи управления .триггеры направления перемещения, дополнительный элемент И, а формирователи путевых сигналов выполнены с парафаз ным выходом, причем прямой выход первого и инверсный выход второго формирователей путевых сигналов подключены ко входам ключа управления, выход которого соединен с единичным входом триггера направления Вперед и с одним входом выходного ключа, второй вход которого соединен с прямым выходом триггера направления Назад, прямой выход которого и инверсный выход первого формирователей путевых
сигналов подключены ко входам другого ключа управления, выход которого соединен с единичным входом триггера направления Назад и с одним входом выходного ключа, второй вход которого соединен с прямым выходом триггера направления Вперед, нулевые входы обоих триггеров направления подключены к выходу дополнительного элемента И, входы которого соединены с инверсными, выходами формирователей путевых сигналов fij.
Недостаток известного датчика заключается в том, что, в случае возникновения колебаний контролируемого объекта в момент его выхода из зоны работы первого по ходу движения формирователя, вызывающих многократные отключения и срабатывания этого формирователя, происходит формирование многократных импульсов на выходе датчика..,
Аналогичное может происходить и при использовании в качестве чувствительных элементов датчика генераторных переключателей типа БК-0, КВД, переключателей на магнитоуправляемых контактах и прочих путевых переключателей, имеющих неустойчивую работу в моменты перехода их из QAHoro состояния в другое, характеризуемую ВОЗМОЖНЫМмногократным включением и отключением (дребезгом).
При использовании реверсивного счета возможные многократные импульсы на выходе датчика (дробление выходного сигнала) могут привести к формированию должной информации о местонахождении контролируемого объекта.
Целью изобретения является повышение точности датчика.
Поставленная цель достигается тем, что в дискретный датчик перемещения введен, дополнительный триггер, нулевой и единичный входы которого подключены соответственно к единичным входам триггеров направления Вперед и Назад, а прямой и инверсный выходы соединены со вторыми входами соответствующих выходных ключей .
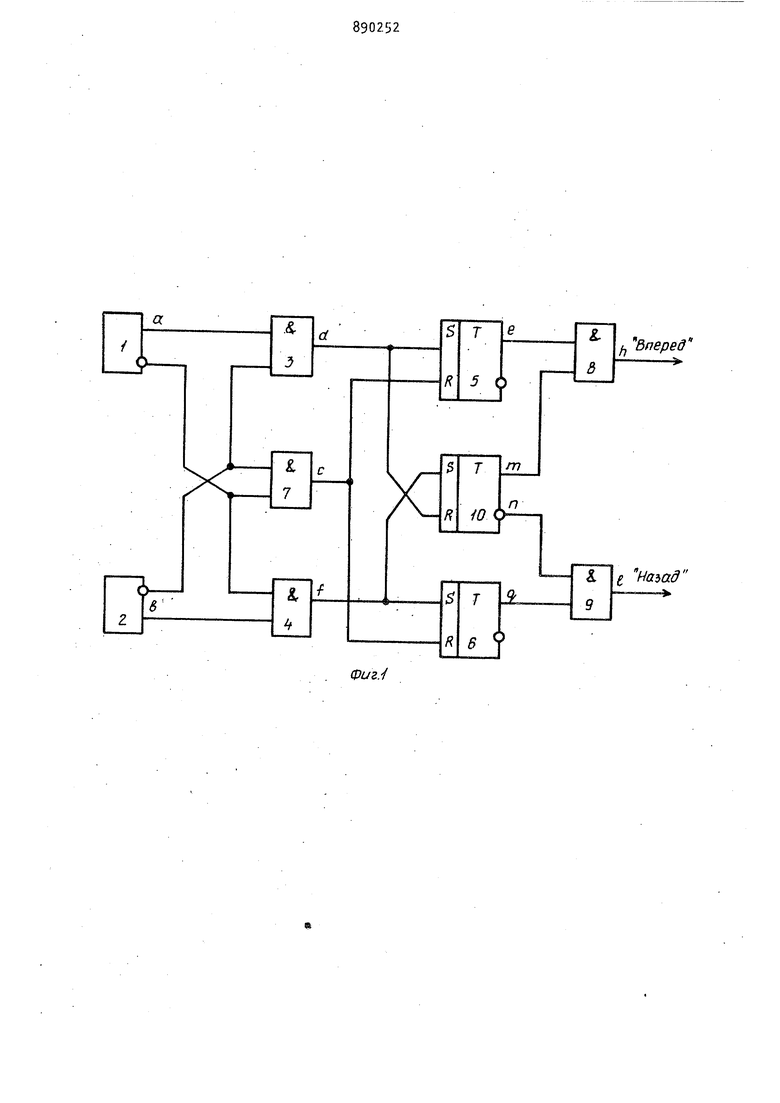
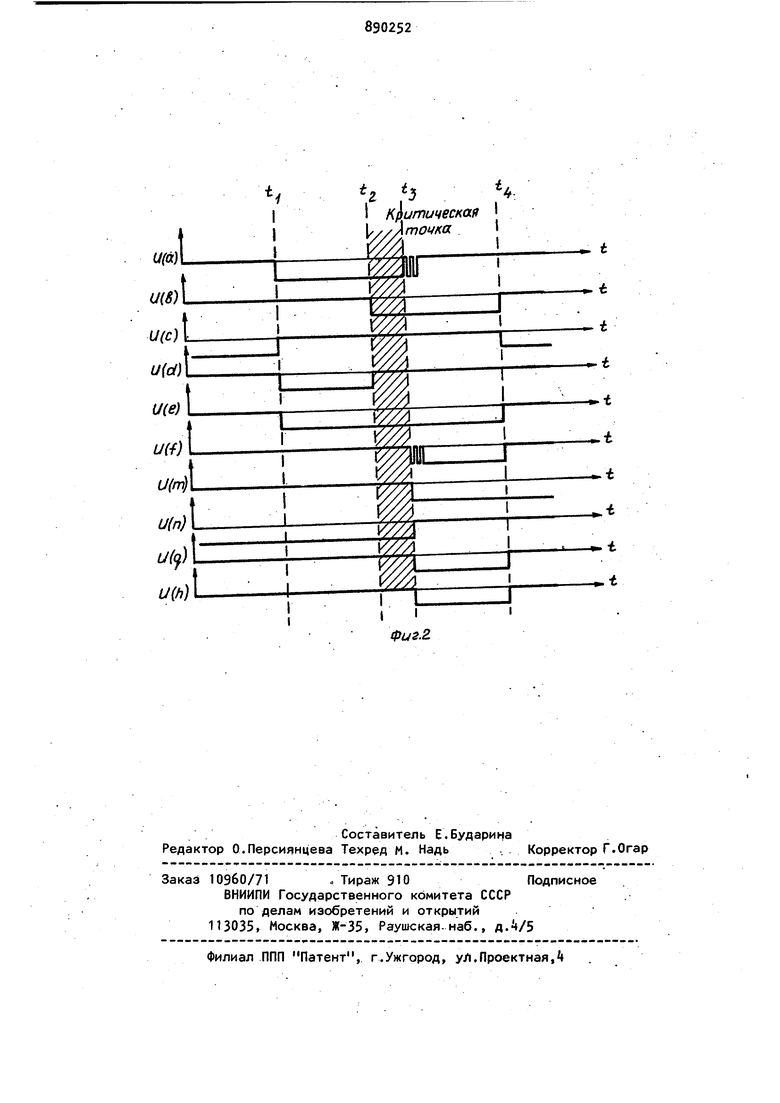
На фиг.1 приведена функциональная схема дискретного датчика перемещения; на фиг.2 - временные диаграммы работы датчика.
Датчик содержит формирователи 1 и 2 путевых сигналов, ключи 3 и управления, триггеры 5 и 6 направления (Вперед и Назад соответственно) элемент И 7 выходные ключи 8 и 9 и дополнительный триггер 10.
Датчик работает следующим образом При отсутствии контролируемого объекта в зоне датчика формирователи 1 и 2 путевых сигналов отключены и на их прямых выходах присутствуют нулевые, а на инверсных - единичные сигналы. При этом единичный сигнал с выхода элемента И 7 (фиг.2 с) удерживает триггеры 5 и 6 направления в нулевом состоянии. На оба входа три| гера 10 поступают нулевые сигналы с выходов ключей 3 и t управления, выполненных на элементах И. Исходное состояние триггера 10 может быть произвольным, что, однако, не влияет на дальнейшую работу датчика. Принимаем исходное состояние триггера 10 нулевым (фиг.2 п). Выходные ключи 8 и 9i выполненные на элеме нтах И, заперты нулевыми сигналами с прямых выходов соответствующил триггеров 5 и о направления, и сигналы на выходных шинах датчика отсутствуют.
При движении объекта Вперед он в момент времени 1(фиг.2) входит в зону датчика. -При этом срабатывает сначала формирователь 1 путевого сигнала (фиг.2 а), и элем°ент И 7 закрывается, снимая тем самым единичный сигнал с нулевых входов триггеров 5 и 6 (фиг.2 с). Одновременно на выходе ключа 3 управления,, выполненного на элементе И, появляется единичный сигнал (фиг.2 d), и триггер 5 направления Вперед устанавливается в еди(Ничное состояние.. С выхода триггера 5 единичный сигнал (фиг.2 е) поступа ет на вход выходного ключа 8.Однако на выходной шине Вперед сигнал не появляется, так как на втором входе ключа В присутствует нулевой сигнал
с прямого выхода триггера 10, причем последний удерживается в нулевом состоянии единичным сигналом с выхода ключа 3 управления, действующим по его нулевому входу.
Дальнейшее перемещение объекта приводит к срабатыванию формирователя 2 путевого сигнала (момент времени tn на фиг.2), чем снимается единичньТй сигнал с выхода ключа 3 управления, но состояние схемыдатчика не изменяется, так как ключ k управления еще заблокирован по второму входу нулевым сигналом с инверсного выхода формирователя 1..
При выходе объекта из зоны срабатывания формирователя 1. (момент времени tfl,) последний отключается и снимает запрещающий -потенциал с ключа k управления, на выходекоторого (фиг.2 ) появляется единичный си1- нал, которым триггер 10 устанавливается е единичное состояние. Единичный сигнал с прямого выхода триггера 10 (фиг.2 т) поступает на выходной ключ 8 и формирует на его выходе сигнал о прохождении объектом зоны датчика в рассмотренном направлении Вперед (фиг.2 h), причем колебания контролируемого объекта в момент времени t, вызывающие многократные отключения и включения формирователя .2 и поступающие на выход ключа k управления, не изменяют состояния триггера 10 и тем самым не оказывают влияния на выходной сигнал, формируемый на шине Вперед. Длительность
выходного сигнала определяется интервалом времени до выхода объекта из зоны датчика (момент времени t).
Одновременно с появлением сигнала на выходной шине Вперед. единичным сигналом с выхода ключа k управления взводится триггер 6 направления Назад, что обеспечивает подготовку схемы датчика для выдачи сигнала о движении Назад, в случае если объект начнет движение в обратном направлении до завершения цикла работы формирователей 1 и 2 путевых сигналов.
Перемещение о(5ъекта в противоположном направлении вызывает обратный порядок работы формирователей 1 и 2 путевых сигналов, а выходной сигнал формируется ключом 9.
Если же в зоне датчика происходит изменение направления движения объекта, то выходные импульсы либо не появляются вовсе, либо появляется пара импульсов (прямой и обратный), что при использовании реверсивного счета исключает возможность ошибки.
Таким образом, введение триггера 10 позволяет исключить дробление выходного сигнала, вызываемое возможными колебаниями контролируемого объекта в критической точке, которой является момент выхода объекта из зоны работы первого по ходу движения формирователя 1 или 2 путевого сигнала. Кроме того, этим же исключает-, ся и влияние дребезга чувствительных элементов датчика в его- критической точке. Все это обеспечивает повышение точности преобразования
возможного дробза счет исключения
Ленин выходного сигнала.
Применение предлагаемого датчика в различных системах автоматического управления подвижными объектами, в маетности, при создании систем автоматической загрузки многрсекционных емкостей горнообогатительных фабрик позволит с более высокой точностью, по сравнению с известным датчиком, контролировать местонахождение передвижных сбрасывающих тележек, что и обуславливает экономический эффект в. результате использования датчика.
формула изобретения
Дискретный датчик перемещения по авт.св. ff , otличaющ и и с я тем, что, с целью повышения точности датчика, в него введен дополнительный триггер, нулевой и единичный входы которого подключены соответственно к единичным входам триггеров направления Вперед и Назад, а прямой и инверсный выходы соединены со вторыми входами соответствующих выходных ключей.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № , кл.С 08 С 9/08, 1979.
Фиг.2.

| название | год | авторы | номер документа |
|---|---|---|---|
| Дискретный датчик перемещения | 1979 |
|
SU808940A1 |
| Формирователь импульсов датчика положения | 1991 |
|
SU1836661A3 |
| Устройство для автоматического выбора направления движения объекта | 1983 |
|
SU1154179A1 |
| Устройство автоматического контроля веса материала в бункерах | 1985 |
|
SU1255870A1 |
| Устройство для подсчета предметов,движущихся в двух противоположных направлениях | 1982 |
|
SU1076927A1 |
| Устройство управления дозированной загрузкой железнодорожных вагонов | 1982 |
|
SU1173190A1 |
| Устройство контроля веса материала в бункерах | 1980 |
|
SU972243A1 |
| Устройство для автоматического поосного взвешивания объектов | 1983 |
|
SU1154544A1 |
| Формирователь циклов многопроходной прокатки | 1987 |
|
SU1437122A2 |
| Устройство для контроля проследования и счета физических единиц железнодорожного подвижного состава | 1984 |
|
SU1230898A1 |