Изобретение относится к весоизмерительной технике и может быть применено для взвешивания грузов, перевозимых железнодорожным транспортом.
Известны весы для поосного . -взвешивания железнодорожных составов в движении, содержащие путевые датчики, два грузоприемных блока длиной 1290 мм с тензодатчиками, подсоединенными к блоку обработки информации, цифровое табло и устройство цифропечати LIJ.
Недостатком этих весов является применение для идентификации объектов путевьк датчиков, ненадежно работающргх в сложных условиях современного интенсивного производства, например металлургического.
Кроме того, применение путевых датчиков позволяет идентифицировать только объекты со строго определенными межосевыми расстоянием (например, 1800 мм), а для взвешивания других об7:,ектов, например, чугуновозов с межосевым расстояние.м 1500 мм или тележек со слитками требуется перестановка путевы датчиков, а зачастую и изменение схемы блока управления.
Наиболее близким по технической сущности к изобретению является устройство дли автоматического поосного взвешивания объектов, содержащее грузоприемные блоки с весизмерительными датчиками, подключенными че.рез входные блоки и коммутатор к аналого-цифровому преобразователю, выходы которого подключены к вычислительному .блоку, соединенному с регистрирующим приборо и сигнализатор нуля, связанный с блоками определения конца объекта и исключения иерегистрируемых объетов, выходы которых подключены к вычислительному блоку 2),
Устройство способно идентифицировать объекты при длине весо1вой платформы большей межосевого расст ния (1800 мм) вагонов, но меньшей межосевого расстояния (2100 мм) локомотивов.
Однако известное устройство недостаточно технологично и универсально. В настоящее время отечественной промьвиленностью вьтускаются грузоприемные блоки длиной 1290 мм меньшей минимального межосевого ра442
стояния подавляющего большинства объектов. Такие грузоприемные блоки являются прогрессивным техническим средством, уменьшающим стоимость монтажа, наладки и метрологической аттестации весов.
Для известного устройства требуются грузоприемные блоки длиной около 1950 мм.
Для решения задач автоматического взвешивания без участия человека грузопотоков шихты требуются грузоприемные блоки длиной более 2150 мм, что позволяет отличать двухосные тележки с шихтой, межосевое расстояние которых равно в мартеновском производстве 2200 мм, а в конвертерном 3500 мм.
Таким образом, для решения одной и три же задачи, а именно поосного взвешивания различных объектов, требуются грузоприемные блоки нескольких типоразмеров, не совпадающих с серийно выпускаемыми. Все это удорожает и удлиняет внедрение известного устройства.
Далее, на весовую платформу известного устройства могут одновременно наезжать две оси. Следовательно, платформа и фундамент должны быть рассчитаны на двойную нагрузку и становятся таким образом более громоздкими, дорогостоящими и металлоемкими .
Для успешной работы известного устройства необходимо различать сигналы двух уровней - сигнала при наезде первой оси, затем при наезде двух осей, причем наезд двух осей
продолжается при скорости 10 км/ч 0,05 с. При такой малой продолжительности сигнала и значительных динамических помехах задача достоверной регистрации второго наезда достаточно трудна и возрастает с увеличением скорости движения. Наконец, при использовании прототипа теряется информация о направлении движения, что при работе без участия человека часто имеет существенный характер, так как не дает информацию, что взвешивается - тара или брутто. Кроме того, обработка сигналов весоизмерительных датчиков после их суммирования менее . точна, чем обработка каждого сигнала в отдельности с последующим сумми-рованием.
Цель изобретения - расширение функциональных возможностей при использовании унифицированных грузоприемных блоков.
Поставленная цель достигается тем, что в устройстве для автоматического поосного взвешивания объектов, содержащем грузоприемные блоки с весоизмерительными датчиками, подключенными через входные блоки и коммутатор к аналого-цифровому преобразователю, выходы которого подключены к -вычислительному блоку, соединенному с регистрируюишм прибором, и сигнализатор нуля, связанный с блоками определения конца объекта и исключения нерегистрируемъгх объектов, выходы которых подключены к вычислительному блоку грузоприемные блоки установлены со сдвигом относительно один другого вдоль оси железнодорожного пути так, что их общая длина больше минимального межосевого расстояния объектов, но меньше межосевого расстояния нерегистрируемых объектов, при этом блок исключения нерегистрируемых объектов выполнен.в виде регистра до двух, счетный вход которого связан с входным блоком одного из весоизмерительных датчиков, вход гашения - с выходом сигнализатора нуля, а выходы объединены схемой совпадения, соединенной с выходом сигнализатора нуля.
Кроме того, сигнализатор нуля выполнен в виде компараторов, входы которых соединены с входными блоками весоизмерительных датчиков, .а выходы объединены схемой ИЛИ.
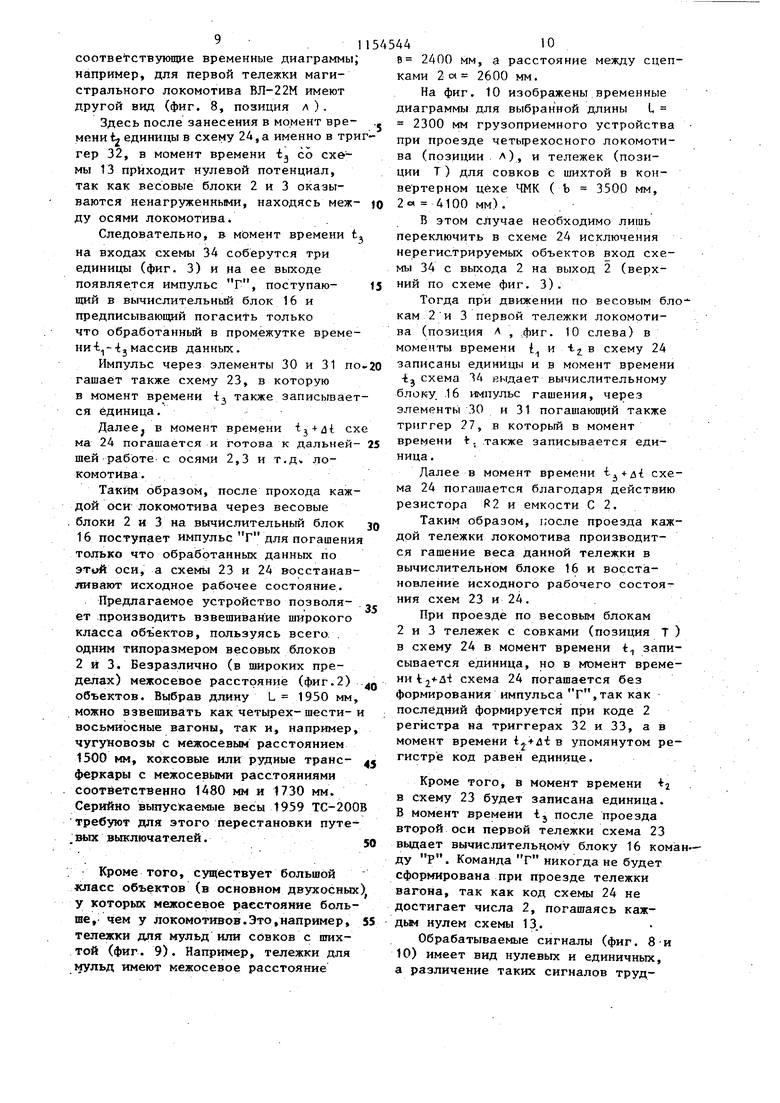
На фиг. 1 показана схема устройcTBai на фиг. 2 - грузоприемное устройство, вид сверху; на фиг. 3 - 6 принципиальные электрические схемы элементов и узлов , на фиг. 7-10 графики, поясняющие работу при взвешивании различных регистрируемых и нерегистрируемых объектов.
Устройство для поосного взвешивания объектов содержит (фиг. 1) встроенные в бетонный приямок под железнодорожный путь 1 грузоприемные блоки 2 и 3 (на фиг. 1 блок 2 дан в разрезе, блок 3 не показан), опирающиеся на весоизмерительные датчики 4 и 5 и фиксируемые в горизонтальной плоскости ограничителями
1545444
6, укрепленными на фундаментных болтах 7.
Весоизмерительный датчик 4 подключен к входному блоку 8, а датчик 5 , к аналогичному входному блоку 9.
Устройство содержит также взвешиваемьй объект 10, компараторы 11 и 12, образующие совместно со схемой ШШ 13 сигнализатор нуля, коммутаJO торы 14, аналого-цифровой преобразователь 15, вычислительный блок 16, в состав которого входят приборные шины 17 (данные, адреса и управления), центральный процессор 18,
5 постоянное запоминающее устройство (ПЗУ) 19, оперативное запоминающее устройство (ОЗУ) 20 и интерфейс 21 для связи с регистратором 22 (цифропечатающая машина, ЭВМ и т.д.).
2Q Кроме того, в устройство входит схема 23 определения конца объекта, схема 24 исключения нерегистрируемых объектов и схема 25 определения направления движения.
25 На приборные шины 17 поступают сигналы Н - Наезд, HI, Н2 наезд на блоки 2 и 3 соответственно, Р - Регистрация с выхода схемы 23 определения конца объекта, Г Гашение с выхода схемы 24 исключения нерегистрируемых объектов, и при необходимости Т - Тара, Б - Брутто со схемы 25определения направления движения.
Сигналы т и Б могут иметь и другой смысл (вперед, назад, влево, вправо и т.д.) в зависимости от технологической ситуации.
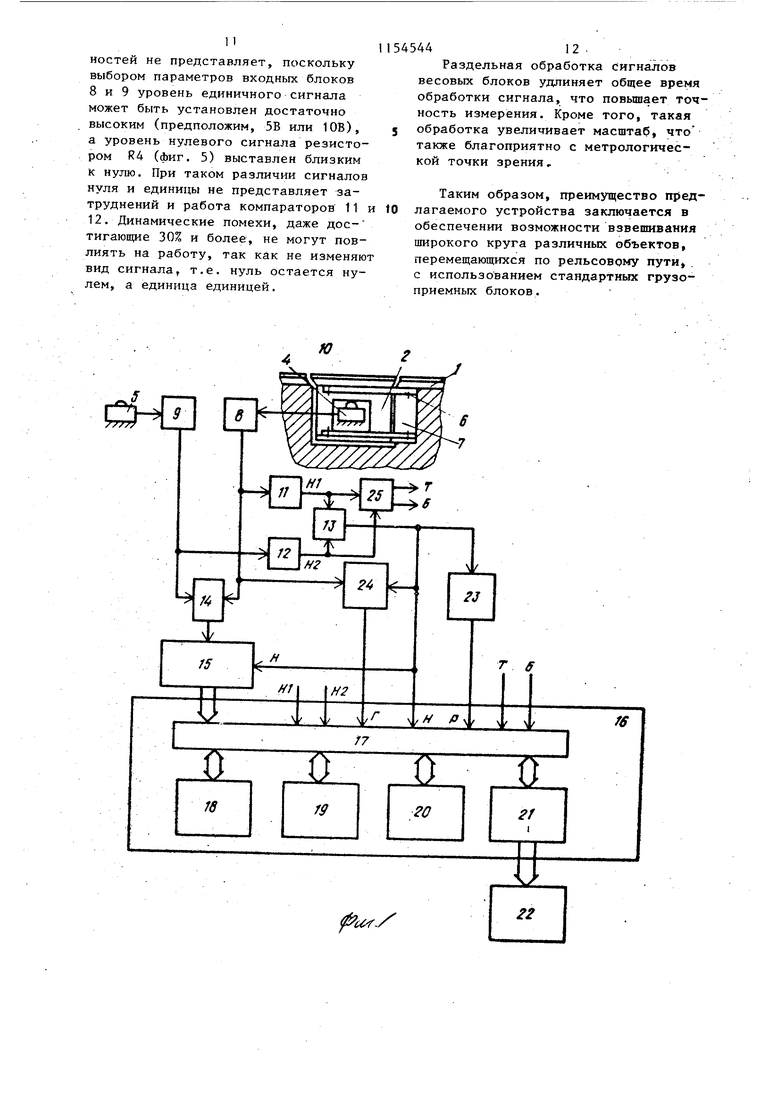
Взаимное расположение блоков 2 и 3, образующих грузоприемное устройство, показано на фиг. 2 i(вид сверху).
Используя стандартный весовой блок от весов 1959 ТС-200В длиной
2 1250 мм, можно путем изменения сдвига между блоками 2 и 3 по оси железнодорожного пути 1 и, следовательно, общей длины грузоприемного устройства Ц , производить
идентификацию подавляющего большинства транспортных объектов, прнхгем межосевые расстояния контролируемых объектов (вагонов) и неконтролируемых объектов (локомотивов), могут
быть самыми различными, что будет показано ниже.
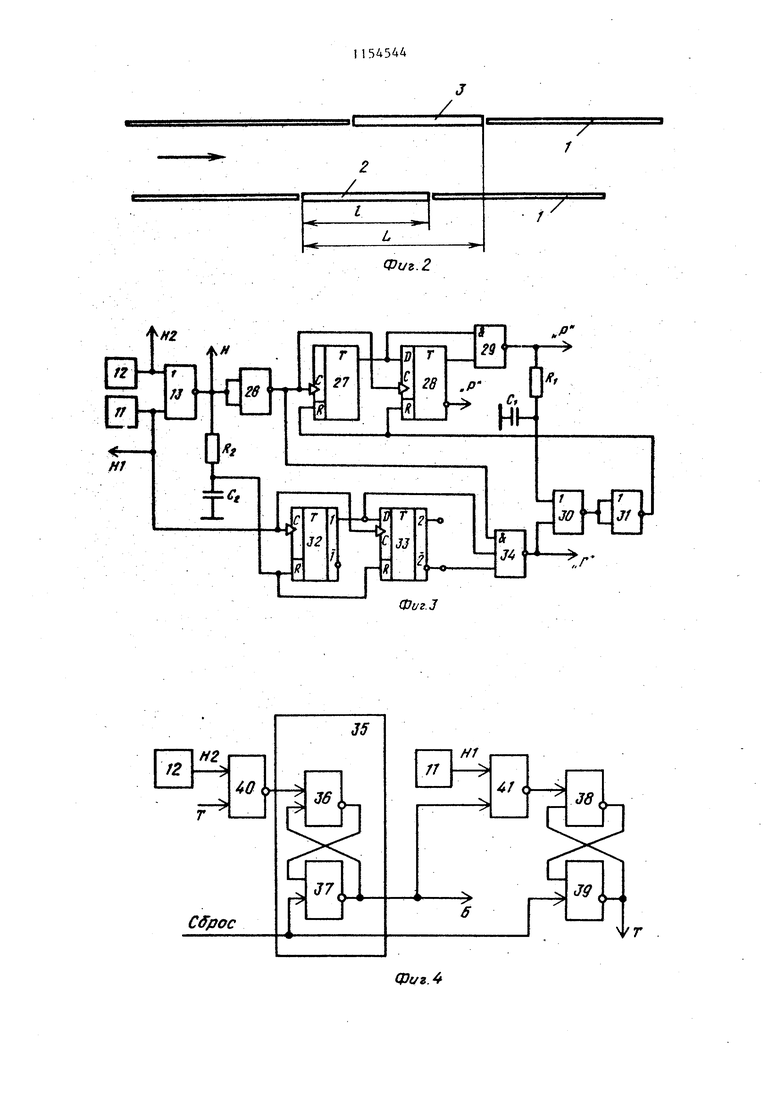
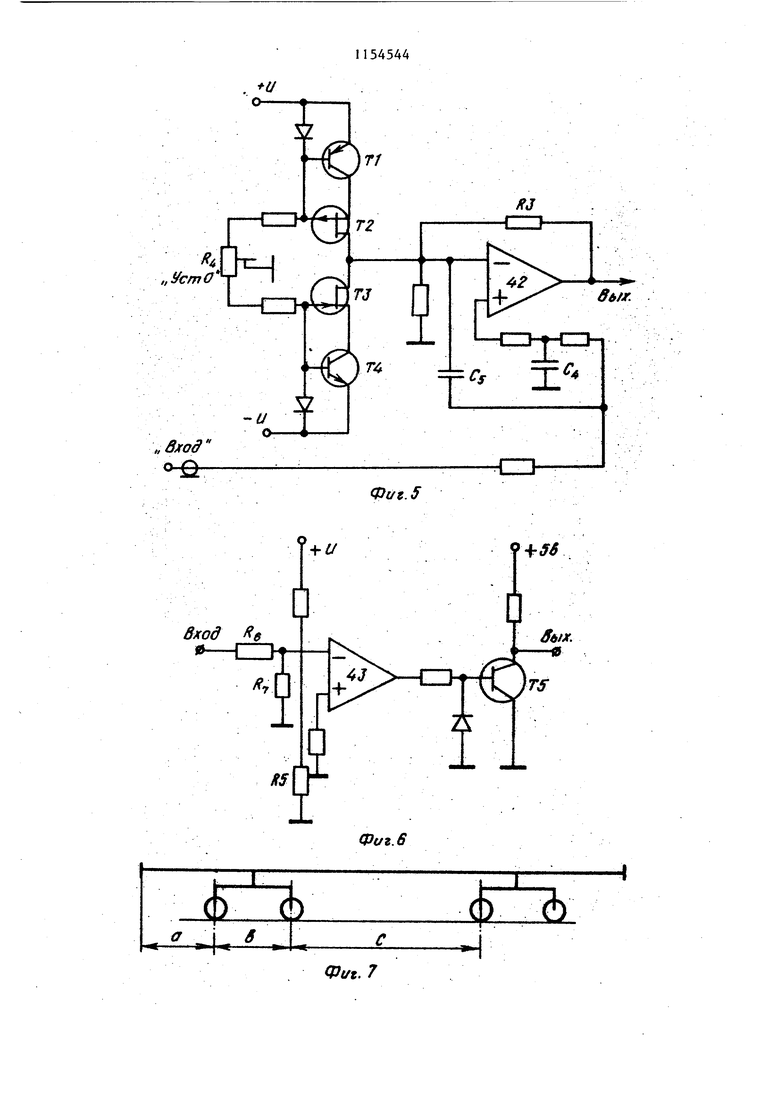
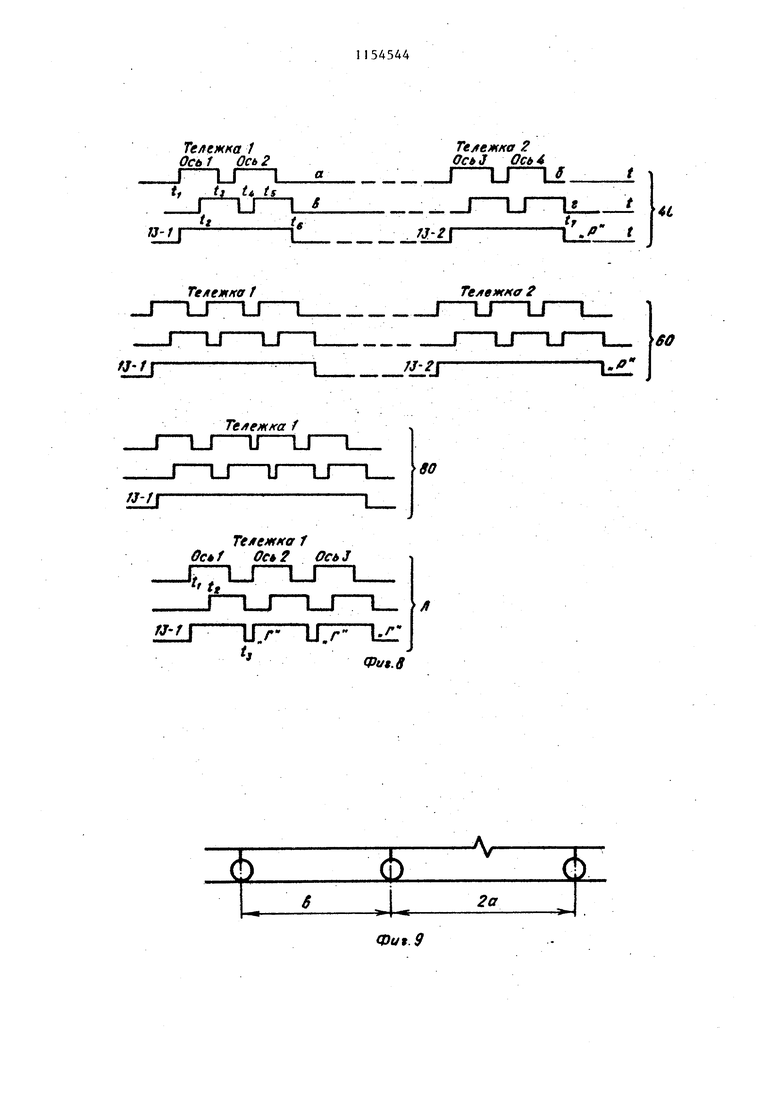
Выполненрге грузоприемного устройства (фиг., 2) существенно упрощает . форму сигналов и саму схему управления, превращая предлагаемое устройство в автомат. Полные принципиальные электричес кие схемы 23 и 24 определения конца объекта и исключения нерегистрируем объектов во взаимодействии с други ми элементами предлагаемого автомата приведены на фиг. 3. Схема 23 определения конца объек та состоит из ключа 26, регистра из триггеров 27 и 28, выходы которых объединены схемой 29 совпадения выход которой суть выход Регистрация . В качестве выхода Регистраци в данном конкретном случае может быть использован инверсный выход триггера 28. При этом схему 29 не используют. Триггеры 27 и 28 самоустанавливаются в исходное положение после прохождения сигнала благодаря резистору R1, емкости С схеме 30 ИЛИ и ключу 31, подсоединенному к R -входам триггеров 27 и Схема 24 исключения нерегистрируемых объектов содержит регистр до -двух из триггеров 32 и 33, причем счетный вход регистра связан с компаратором 11, а вход гашения - с выходом схемы ИЛИ 13 (иными словами с выходом сигнализатора н ля, образованного элементами 11-13). Схема 34 совпадения объединяет выбранные выходы триггеров 32 и 33 и инверсный выхоп сигнализатора нул получаемый с выхода ключа 26. На фиг. 3 входы схемы 34 совпадения объединены с вькодами 1 и 2 триггеров 32 и 33, однако вместо ин версного вькода 2 триггера 33 может использоваться также и его выход 2 (прямой). Объединение на схеме 34 совпаде ния выхода 1 триггера 32 и выхода триггера 33 позволяет исключать из регистрации объекты, межосевое расстояние которых больше размера грузоприемного устройства (фиг. 2) а объединение выхода 1 триггера 32 и выхода 2 триггера 33 автоматически исключает из регистрации объекты с межосевым расстоянием, .меньшим размера t . Оба этих случ важны и встречаются - первый при взвепшвании вагонов грузового парка СССР, а второй - при взвешивани внутренних технологических потоков (например, шихты). 4 Резистор 1 2 и емкость С 2 применены для некоторой задержки сброса триггеров 32 и 33 при появлении на выходе схемы 13 нулевого потенциала с тем, чтобы длительность импульса г, формируемого схемой 34, была достаточной. Схема 25 определения направления движения (фиг. 4) содержит, например, триггер 35 Брутто на элементах 36 и 37, триггер Тара на элементах 38, 39, схемы 40 и 41 совпадений, соединенные с компараторами 1 1 и 12. Так как в технологических потоках направление движения грузов регламентированоj то порядок срабатывания компараторов 11 и 12 может б.ыть использован для целей автоматического учета грузопотоков. Электрическая схема входного блока 8 (9) выполнена на операционном усилителе 42, усиление которого регулируется резистором R3. Приемлемые номиналы резистора R4 регулировки нуля получаются благодаря каскадному включению транзисторов Т1 и Т4 с полевыми транзисторами Т2 и ТЗ, образующими генератор тока. Подбором HOMHHaj.oB емкостей С4 и С5 при заданных номиналах резисторов можно добиться фильтрации сравнительно высокочастотных помех., наложенных на сигнал, что значительно облегчает последующую цифровую обработку сигнала в вычислительном блоке 16. При недостаточном уровне выходного сигнала в схему (фиг. 5) может быть добавлен дополнительнш каскад усиления. Компараторы 11 и 12 имеют, например, схему, показанную на фиг. 6, и состоят из операционного усилителя 43 и формирователя на транзисторе Т5 для получения сигнала стандартного уровня. Порог срабатывания компаратора 1V(12) устанавливается подбором резисторов R6, R7 и регулируется резистором R5. Устройство для поосного взвешивания объектов работает следукмцим образом.. Рассмотрим типичный для магистральных железнодорожных путей объект (фиг. 7) - четырехосный вагон или локомотив. Для подавляющего большинства вагонов межосевое расстояние - b 1800-1850 мм, расстояние С 4000 мм, расстояние « 1500 мм. Для подавляющего числа локомотивов расстояние Ъ 2100 мм, что и используется в предлагаемом устройстве. Если общую длину грузоприемного устройства (фиг, 2) выбрать L 1950 мм, при стандартной длине одного весового блока 2(3) Р 1250мм, то проезд четырехосного вагона по грузоприемной платформе отображается на фиг. 8 (позиция 4о). Здесь позиция сх и б показывают наезды первой и второй тележек объекта на весовой блок 2, а позиции в и 15 г. - наезды первой и второй тележек на весовой блок 3 (фиг. 2). Позиция 13-1 показывает выходной сигнал cxeMi.i ИЛИ 13 (или сигнализатора нуля). Аналогично для шестиосного объекта имеем позиции 6, для восьмиосног 8„. для локомотива - Л. причем Для 0, для локомотива - Л, причем Для последних двух объектов (фиг. 8) показаны только наезды первых тележек.. Рассмотрим теперь временные диаграммы (фиг. 8) в совокупности с фиг. 1 - 3. Пусть на грузоприемные блоки 2 и в направлении, указанном на фиг. 2 стрелкой, наезжает четырехосный ваго так, что в момент времени -t нагружается весовой блок 2, в момент времени весовой блок 3. , Тогда в момент времени t, сраба 1 тывает компаратор 11 и схема 13 (позиция 13-1,фиг. 8), а на вычисли тельный блок 16 и аналого-цифровой преобразователь 15 поступает сигнал ПО которому начинается обработка выходного воздействия весоизмерительного датчика 4 по одному из известных алгоритмов. В момент времени i.2 срабатывает компаратор 12 и вычислительный блок 16 начинает обработку выходного воздействия вес измерительного датчика 5, В момент времени t первая ось тележки № 1 .вагона съезжает с блока 2 и обра-ботка выходного воздействия весоизмерительного датчика 4 прекращается а в момент времени- возобновляется . В момент времени tj (фиг. 3) в схему 24 исключения нерегистрируемы объектов будет занесена первая единица, так что на выходе 1 триггера 32 появляется единичньй потенциал. 115 5 10 448 В момент времени - вторая ось тележки № 1 вагона съезжает с весового блока 2 и обработка выходного воздействия весоизмерительного датчика 4 прекращается. В момент времени-ty в схему 24 исключения нерегистрируемых объектов заносится вторая единица, так что на выходах 1 и 2 триггеров 32, 33 с этого момента - единичные потенциалы. В момент времени t первая тележка четырехосного вагона съезжает с весового блока 3, на вьгходе схемы 13 появляются нулевой потенциал а схему 23 определения конца объекта заносится первая единица, т.е. на прямом вьгходе триггера 27 (фиг, 3) появляется единичный-выход. Нулевой потенциал схемы 13 благодаря резистору R2, емкости С2 погашает схему 24 исключения нерегистрируемых объектов с задержкой, однако срабатывания схемы 34 и появления импульса Г не произойдет, поскольку выход 2 триггера 33 - нулевой. Далее, в момент времени-t/f i происходит га;шение триггеров 32 и 33 схемы 24. При наезде второй тележки вагона на весовые блоки 2 и 3 полностью повторяется описанная картина, но в момент времени i-, в схему 23 определения конца объекта заносится вторая единица, на выходе схемы 29 появляется нулевой потенциал. в вычислительный блок 16 подается м„ ц и-п команда Регистрация - Р .Далее через цепочку R1, С1 и элементы 30 и 31 производится самосброс триггеров 27 и 28 схемы 23. Автомат после этого готов к приему следующих объектов.. . Если регистрируемый объект шестиосный или восьмиосный (позиции бе и 8р, фиг. 8), то никаких особенностей в работе схемы не наступает, поскольку на каждую тележку вагона скема 13 срабатывает лишь один раз (позиции 13-1 и 13-2, фиг. 8). Поскольку регистр на триггерах 32 и ЗЗ считает только до двух, то его код при лаездах, например, восьмиосного вагона будет иметь вид 01222012220, т.е. для работы устройства и в частности схемы 24 безразлнчно сколько осей - 4,6 или 8 у объекта. Так как длина L грузоприемного устройства (фиг. 2) меньше межосевого расстояния локомотива, то
у . 115/ оответствующие временные диаграммы;
апример, для первой тележки магитрального локомотива ВЛ-22М имеют ругой вид (фиг. 8, позиция л).
Здесь после занесения в момент вре- .j ени 2 единицы в схему 24,а именно в тригер 32, в момент времени i со сх&ы 13 приходит нулевой потенциал, ак как весовые блоки 2 и 3 оказыаются ненагруженньми, находясь меж- ю у осями локомотива.
Следовательно, в момент времени tj на входах схемы 34 соберутся три единицы (фиг. 3) и на ее выходе появляется импульс Г, поступаю- 13 щий в вычислительный блок 16 и предписывающий погасиФь только что обработанный в промежутке времени массив данных.
Импульс через элементы 30 и 31 по..20 гашаёт также схему 23, в которую в иомент времени i также записывается единица.
ДaлeeJ в момент времени ii + ui схе на 24 погашается и готова к дальней- 25 шей работе с осями 2,3 и т,д локомотива .
Таким образом, после прохода каждой оси локомотива через весовые блоки 2 и 3 на вычислительный блок зд 16 поступает импульс Г для погашения только что обработанных данных по этуй оси, а схемы 23 и 24 восстанавливают исходное рабочее состояние.
Предлагаемое устройство позволя- . ,,
ет .производить взвешивание широкого класса объектов, пользуясь всего одним типоразмером весовых блоков 2 и 3. Безразлично (в широких пределах) межосевое расстояние (фиг.2) Q объектов. Выбрав длину L 1950 мм, можно взвешивать как четырех-шести-и восьмиосные вагоны, так и, например, чугуновозы с межосевым расстоянием 1500 мм, коксовые или рудные транс- 5 феркары с межосевыми расстояниями соответственно 1480 мм и 1730 мм. Серийно выпускаемые весы 1959 ТС-200В требуют для этого перестановки путевых выключателей.50
Кроме того, существует большой класс объектов (в основном двухосных) у которых межосевое раестояние больше,- чем у локомотивов.Это,например, $5 тележки для мульд или совков с шихтой (фиг. 9). Например, тележки для мульд имеют межосевое расстояние
4410
в 2400 мм, а расстояние между сцепками 2« 2600 мм.
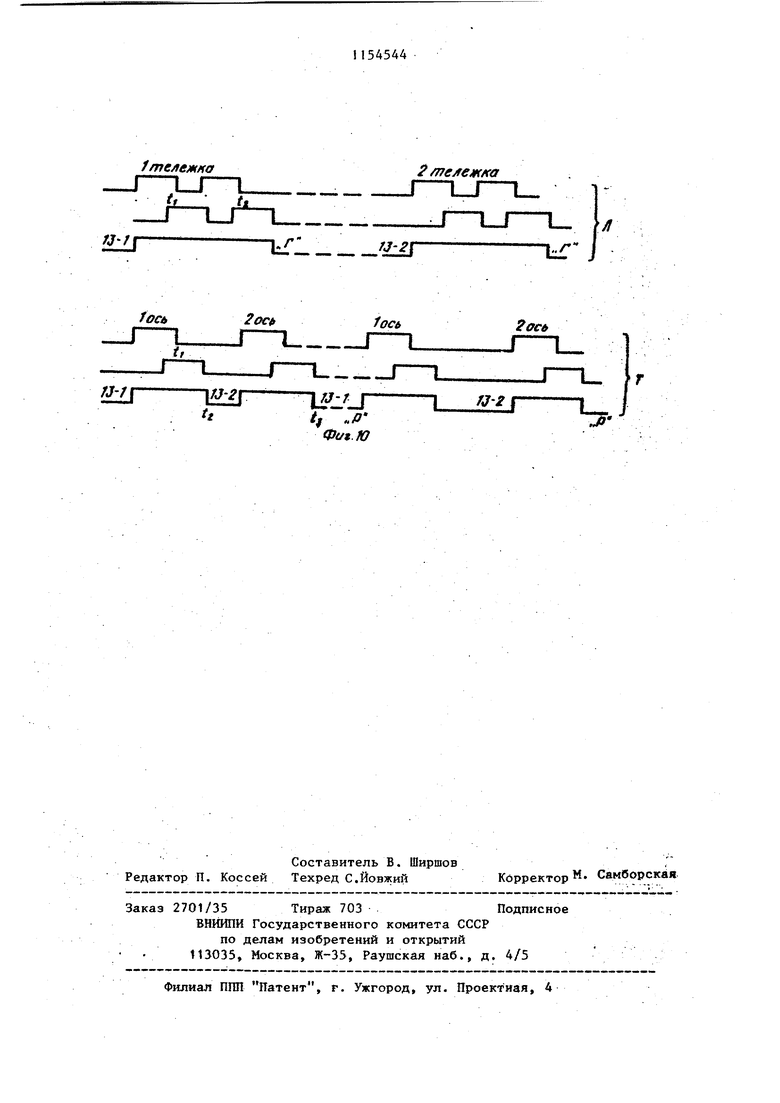
На фиг. 10 изображены временные диаграммы для выбранной длины L, 2300 мм грузоприемного устройства при проезде четырехосного локомотива (позиции -), и тележек (позиции Т) для совков с шихтой в конвертерном цехе ЧМК ( Ъ 3500 мм, 2« 4100 мм).
В этом случае необходимо лишь переключить в схеме 24 исключения нерегистрируемых объектов вход схемы 34 с выхода 2 на выход 2 (верхний по схеме фиг. 3).
Тогда при движении по весовым блокам 2и 3 первой тележки локомотива (позиция А , фиг. 10 слева) в моменты времени t и t в схему 24 записаны единицы и в момент времени -tj схема 34 выдает вычислительному блоку .16 импульс гашения, через элементы 30 и 31 погашаюпщй также триггер 27, в который в момент времени t. также записывается единица .
Далее в момент времени tj + j-i схема 24 погашается благодаря действию резистора Р2 и емкости С 2.
Таким ббразом, 1;осле проезда каждой тележки локомотива производится гашение веса данной тележки в вычислительном блоке 16 и восстановление исходного рабочего состояния схем 23 и 24.
При проезде по весовым блокам 2 и 3 тележек с совками (позиция Т ) в схему 24 в момент времени t, записывается единица, но в момент времени схема 24 погашается без формирования импульса Г,так как последний формируется при коде 2 регистра на триггерах 32 и 33, а в момент времени в упомянутом регистре код равен единице.
Кроме Toroj в момент времени 2 в схему 23 будет записана единица. В момент времени tj после проезда второй оси первой тележки схема 23 выдает вычислительному блоку 16 команду Р. Команда Г никогда не будет сформирована при проезде тележки вагона, так как код схемы 24 не достигает числа 2, погашаясь каждьм нулем схемы 13..
Обрабатываемые сигналы (фиг. 8-и 10) имеет вид нулевых и единичных, а различение таких сигналов труд
ностей не представляет, поскольку выбором параметров входных блоков 8 и 9 уровень единичного сигнала может быть установлен достаточно высоким (предположим, 5В или 10В), а уровень нулевого сигнала резистором R4 (фиг. 5) выставлен близким к нулю. При таком различии сигналов нуля и единицы не представляет затруднений и работа компараторов 11 12. Динамические помехи, даже достигающие 30% и более, не могут повлиять на работу, так как не изменяю вид сигнала, т.е. нуль остается нулем, а единица единицей.
5454412 .
Раздельная обработка сигналов весовых блоков удлиняет общее время обработки сигнала, что повышает точность измерения. Кроме того, такая J обработка увеличивает масштаб, что также благоприятно с метрологической точки зрения.
Таким образом, преимущество предлагаемого устройства заключается в обеспечении возможности взвешивания широкого круга различных объектов, перемещающихся по рельсовому пути,. с использованием стандартных грузоприемных блоков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания железнодорожного состава в движении | 1984 |
|
SU1229586A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1984 |
|
SU1174771A1 |
| Устройство для взвешивания железнодорожного подвижного состава | 1984 |
|
SU1234728A1 |
| Устройство для поосного взвешивания железнодорожных вагонов | 1984 |
|
SU1224598A1 |
| Устройство для взвешивания подвижных объектов | 1987 |
|
SU1432341A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Устройство для взвешивания транспортных объектов в движении | 1984 |
|
SU1236322A1 |
| Устройство для потележечного взвешивания железнодорожных вагонов в движении | 1983 |
|
SU1078256A1 |
| Устройство для поколесного взвешивания объектов | 1986 |
|
SU1408234A1 |
| Способ взвешивания подвижных объектов | 1986 |
|
SU1453179A1 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ПООСНОГО ВЗВЕШИВАНИЯ ОБЪЕКТОВ, содержащее грузоприемные блоки с весоизмерительными датчиками, подключенными через входные блоки и коммутатор к аналого-цифровому преобразователю, выходы которого подключены к вычислительному блоку, соединенному с регистрирующим прибором, и сигнализатор нуля, связанный с блоками определения конца объекта и исключения нерегистрируемых объектов, выходы которых подключены к вычислительному блоку, о т л и ч а ющ е е с я тем, что, с целью расширения функциональных возможностей при использовании унифицированных грузоприемньос блоков, в нем грузоприемные блоки установлены со сдвигом относительно один другого вдоль оси железнодорожного пути так, что их общая длина больше минимального межосевого расстояния объектов, но меньше межосевого расстояния нерегистрируемых объектов, при этом блок исключения нерегистрируемых объектов выполнен в виде регистра до двух, счетный вход которого связан с входным блоком одного из весоизмерительных датчиков, вход (Л гашения - с выходом сигнализатора нуля, а выходы объединены схемой совпадения, соединенной с выходом сигнализатора нуля. 2. Устройство по п. 1, отличающееся тем, что сигнализатор нуля выполнен в виде комел параторов, входы которых соединены « с входными блоками весоизмерительных S t датчиков, а выходы объединены схемой ИЛИ. 
22
.X
(
Н2
1ЙП
А
-с
Фиг. 2
вход Kg
S6
Фиг.6
(Pt/t. 7 Телетка 1 Ocbl Ось 2
4i TejiemKO 2 Ось а Ос А 4
60
fj-f
.ff
JUS
80
TejrcMfffff 1 Ось 2 OcbJ
/I
±r
(Pui.e
Фиг. 9
/J-/
2/nejreiK/fa
/1
I../Ж1Г
/, «Д
Фиг.Ю
/
Ъг
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приборы и системы управления, 1983, № 4, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для поосного взвешивания вагонов в движении | 1982 |
|
SU1076769A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| . | |||
