СП
4
м
Изобретение относится к автоматическому управлению подвижными объектами и может быть использовано для управления движением реверсивных загрузочных тележек.
Целью изобретения является расширение функциональных возможностей устройства путем обеспечения циклического движения объекта в заданной зоне.
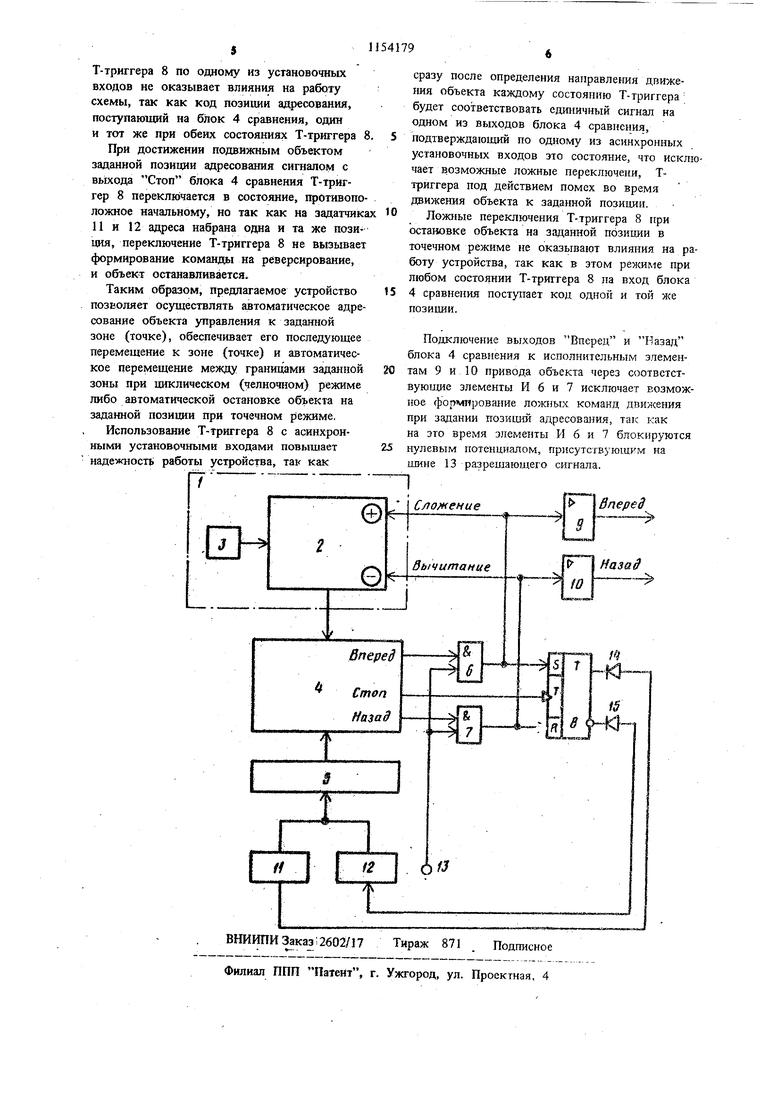
На чертеже изображена функциональная схема устройства.
Устройство содержит блок 1 определения фактического положения объекта, выпо;шенный, например, на реверсивном двоичном счетчике 2 и подключенном к его счетному входу датчике 3 путевых импульсов, блок 4 сравнения, шифратор 5, элементы И 6 и 7, коммутационный злемент (Т-триггер) 8, исполнительные элементы вперед 9 и назад 10 и первый и второй задатчики 11 и 12 адреса соответственно левой и правой границ зоны соответственно.
Первая группа входов блока 4 сравнения через дешифратор 5, а вторая - непосредствено подключены соответственно к выходам задатчиков 11 и 12 и к выходам реверсивного счетчика 2 блока 1 определения фактического положения объекта. Выходы Вперед и Назад блока 4 сравнения подключены к первы входам элементов И 6 и 7 соответственно, арутие входы которых объединены и подключены к шине 13 разрешающего сигнала, а их выходы соединены с единичным и нулевым установочными входами Т-триггера 8, связанными с исполнительными элементами Вперед 9 и Назад 10 привода объекта и входами управления Сложение и Вычитание блока определения фактического положения объекта соответственно.
Выход Стоп блока 4 сравнения . соединен со счетным входом Т-триггера 8, прямой и инверсный выходы которого через развязыв 1ющие диоды 14 и 15 подключены к входам считывания задатчиков 11 и 12 адреса и пра вой границ зоны соответственно.
Устройство работает следующим образом.
В исходном состоянии на шине 13 присутствует нулевой сигнал, которым закрываются по вторым входам элементы И 6 и 7, при этом на входы исполнительных элементов 9 и 10 поступают нулевые сигналы, т. е. на объект управления никакого воздействия не оказывается. Объект неподвижен, а содержимое реверсивного счетчика 2 блока 1 определения фактического положения объекта однозначно соответствует коду фактического положения объекта.
Рассмотрим работу устройства при задании циклического (челночного) перемещения объекта в выбранной зоне.
Задатчиками 11 и 12 адреса устанавливают5 ся позиции адресования, соответствующие левой и правой границам зоны, в которой требуется осуществлять автоматическое циклическое перемещение объекта. При этом в блоке 4 сравнения сравниваются код фактического положения объекта управления, поступающий с выходов реверсивного счетчика 2, и код позиции одной из границ заданной зоны, на вход считывания задатчика адреса которой поступает нулевой сигнал с выхода Т -триг гера 8, причем исходное состояние Т-три тера 8 не влияет на работу устройства, так как при появле1ши разрешающего единичного сигнала на щине 13 и последующего за этим формирования команды на движение объекта 0 Т-триггер 8 сразу ориентируется по одному из асинхронных установочных входов в состояние, однозначно соответствующее выбранному направлению движения объекта управления.
Когда объект управления находится за пределами заданной зоны, например левее зоны, а Т-триггер 8 при включении питания установится в нулевое состояние, при кото-, ром нулевой сигнал с его прямого выхода : через развязывающий диод 14 поступает на 0 вход считьтания задатчика 11 адреса левой границы, на входы пшфратора 5 поступает десятичный код позиции левой границы зоны, С выходов шифратора 5 двоичный код этой позиции поступает на блок 4 сравнения, где сравнивается с кодом фактического положения объекта. Блок 4 сравнения формирует единичный сигнал на выходе Вперед, который поступает на первый вход элемента И 6. Формирование команды на движение 0 объекта начинается с момента появления на цшне 13 разрешающего единичного сигнала, который сохраняет свое значение до следуюШей смены задания. Этим сигналом разрешается работа элементов И 6 и 7.
В данном случае схема совпадения собирается на элементе И 6, единичным сигналом с выхода которого Т-триггер 8 по единичному установочному входу (S-входу) устанавливается в единичное состояние. Однако состо® яние сигналов на выходах блока 4 сравнения не изменяется, так как единичным состоянием Т-триггера 8 уже опрашивается задатчик 12, числовое значение которого больще числового значения позиции левой границы и, следовательно, больше числового значения позиции, соответствующей фактическому положению
объекта управления. Поэтому блок 4 сравнения продолжает формировать единичный сигнал на выходе Вперед, который поступает на выход элемента И 6, и исполнительный : элемент 9 вьфабатывает команду Вперед, что обеспечивает перемещение объекта п ука занном направлении. Одновременно единичный сигнал с выхода элемента И 6 поступает на вход унравлсиня сложения блока 1 определения фактического положения объекта и обеспечивает суммиро вание импульсов, поступающих на счетньп вход реверсивного счетчика 2 от датчика 3 путевых импульсов при движении объекта в направлении Вперед. Кроме того, единичный сигнал с выхода элемента И 6 поступает на единичный установочный вход (S-вход) Т-триггера 8 н устойчиво удерживает его в едшимном состоянии, исключая возможные ложные переключе ния Т-триггера 8 под действием помех. При перемещении объекта в направлении Вперед и достижении позиции, соответствующей левой границе заданной зоны, направление его движения не изменяется и объект продолжает движение в зоне к ее правой границе, так как ед шичный сигнал на выходе Вперед блока 3 сравнения удерживается до тех, пор, пока код определяющей правую границу зоны, будет больше кода фактического положения объект управления. При достижении объектом правой границы зоны единичный сигнал на выходе Вперед блока 4 сравне1шя, а следовательно, и на вы ходе элемента И 6 исчезает, а }ia выходе Стоп единичный сигнал появляется. Это приводит к TQjvty, что Т-триггер 8 по счетному входу переключается в противоположно а именно нулевое состояние, которым онрашивается задатчик И адреса левой границы зоны. Двоичный код позиции, соответствующей левой границе зоны, с выходов шифратора 5 поступает на блок 4 сравнения и сравнивается с кодом фактического положения объекта находящегося в этот момент на позиции, соответствующей правой границе заданной зоны. Блок 4 сравнения при этом формирует единичный сигнал на выходе Назад, которы через элемент И 7 включает исполнительный элемент 10, обеспечивая автоматический реверс объекта у правой границы заданной зоны. Одновременно ед гаичный сигнал с выхода элемента И 7 поступает на вход ; управления вычитанием блока 1 определегшя фактического положения объекта и обеспечивает вычитание импульсов, поступающих на счетный вход реверсивного счетчика 2 от дат 179д чика 3 путевых импульсов при движении объекта управления в направлении Назад. Кроме того, этот сигнал поступает на нулевой установочный вход (R-вход) Т-триггера 8 и устойчиво удерживает его в нулевом состоянии, исключая возможные ложные переключения его под действием полтех. Объект управления начинает перемещаться в обратном направлении и при дос1яже1гин левой границы зоны единичный сигнал с выхода Назад блока 4 сравнения исчезает, а навыходе Стоп появляется, что вызывает срабатывание Т-триггера 8 по счетному входу. Т-триггер 8 переключается в единичное состояние, при этом на блок 4 сравнения поступает код позиции, соответствующий правой границе зоны, что вызывает .автомати кcкoc формирование команды на движение Вперед. Таким образом, при въезде в заданную . зону с любой стороны объект управления продолжает движение к ее противоположной 1-рашш.е, у которой автомат.ическн выполняется реверс. В далышйщем осуществляется автоматическое Перемещение объекта между границами зоны в циклическом ( челночном) режиме до тех пор, пока не будет задана новая программа. Если в результате задания зоны объект управления окажется внутри ее, то начальное движение объекта может быть как в одну, так и в другую сторону и определяется начальным состоянием Т-триггера 8. Так, при нулевом состоянии Т-триггера 8 объект начинает движение в направлении Назад, а при его единичнол состоянии - в направлении Вперед. Егли же при задании зоны положения . объекта управления совпадает с одной из границ зоны, то независимо от начального состояния Т-триггера 8 объект начинает перемещение к протиповоложной границе, при этом Т-триггер 8 сразу переключается в соответствующее положение. Устройство обеспечивает также адресование объекта управления к одной позиции (точечный режим). Работа устройства в точечном режиме заключается в следующем. Адрес позиции, к которому требуется отправить объект, набирается одновременно на обоих задатчиках 11 и 12 адреса. При появлении разрещающего единичного потенциала на цшне 13 единичный сигнал с одного из выходов блока 4 сравнения проходит а выход соответствующего элемента И и включает исполнительный элемент привода движения объекта в.сторону заданной позишш. При этом возможное переключение
Т-триггера 8 по одному из установочных входов не оказывает влияния на работу схемы, так как код позивди адресования, поступающий на блок 4 сравнения, один и тот же при обеих состояниях Т-триггера 8
При достижении подвижным объектом заданной позиции адресования сигналом с вь11хода Стоп блока 4 сравнения Т-триггер 8 переключается в состояние, противоположное начальному, но так как на задатчика И и 12 адреса набрана одна и та же познщш, переключение Т-триггера 8 не вызывает формирование команды на реверсирование, и объект останавливается
Таким образом, предлагаемое устройство позволяет осуществлять автоматическое адресование объекта управления к заданной зоне (точке), обеспечивает его последующее перемещение к зоне (точке) и автоматическое перемещение между границами заданной зоны при циклическом (челночном) режиме либо автоматической остановке объекта на заданной позиции при точечном режиме,
Использование Т-триггера 8 с асинхронными установочными входами повышает надежность работы устройства, так как
сразу после определения направления движе1ШЯ объекта каждому состоянию Т-триггера будет соответствовать единичный сигнал на одном из выходов блока 4 сравнения, подтверждающий по одному из асинхронных установочных входов это состояние, что исключает возможные ложные переключени, Ттриггера под действием помех во время движения объекта к зада1шой позигщи.
Ложные переключения Т-триггера 8 ггри остановке объекта на заданной позиши в точечном режиме Не оказывают влияния на работу устройства, так как в этом ре)1симе при любом состоянии Т-триггера 8 на вход блока 4 сравнения пост}шает код одной и той же позиции.
Подключение выходов Вперед и Назад блока 4 сравнения к исполнительным элементам 9 и 10 привода объекта через соотвстствуютдие элементы И 6 и 7 исключает возможное формирование ложных команд движения при задании позиций адресования, так как на это время элементы И б и 7 блокируются нулевым потенциалом, присутствующим на шине 13 разрещающего сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для автоматического выбора направления движения объекта | 1985 |
|
SU1270089A1 |
| Устройство для автоматического выбора направления движения объекта | 1987 |
|
SU1425146A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство для автоматического выбора направления движения объекта | 1986 |
|
SU1323485A1 |
| Устройство для автоматического адресования транспортных средств | 1987 |
|
SU1432560A1 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| Устройство для автоматического выбора направления движения объекта | 1981 |
|
SU1066917A1 |
| Устройство для автоматического адресования транспортных средств | 1983 |
|
SU1089586A1 |
УСТЮЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВЫБОРА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ОБЪЕКТА, содержащее блок сравнения, первая н вторая группы входов которого под- ключены соответственно к выходам блока определения фактического положения объекта и задатчика адреса, а первый и второй выходы связаны с исполнительными механизмами привода объекта и с входами управления блока определения фактического положения объекта, отличающееся тем, что, с целью расширения функциональных возможностей путем обеспечения циклического движения объекта в заданной зоне, устройство снабжено вторым задатчиком адреса, коммутирующим злементом, выполненным на Т-триггере, злементами И, выходы которых соединены с установочными входами Т-триггера, счетный вход которого подключен к третьему выходу блока сравнения, первьщ и второй выходы которого соединены соответственно с одними входами злементов И, другие входы которых объединены и подключены к шине разрешающего сигнала, при этом группа выходов вторюго задатчика адреса объединена с выходами первого задат(Л чика адреса, входы которого и второго задатчика связаны с выходами Т-триггера. с
| Устройство для автоматическогоВыбОРА НАпРАВлЕНия дВижЕНия ОъбЕКТА | 1979 |
|
SU812675A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
