Предметом изобретения Я15.1яотоя экскаватор е ii araroii.H.i ходом.
Отличительная особеипость предлагаемого экскаватора eociOirr : совмещении опорной базы i подъемно-опускных гусениц, c;iy KaHuix для передвнжения уксканатора и убирающихся при р ыемке . Для подъема и опускания г ч-еииц применены закрепленные на na.iax поворотные рычаги с ноддержниаю п,им ролнками и онорны п-1 течеж)-:ам11 и шестерни, сидянше на мала.х рычагов и зацепляюндиеся peiiixoii, соч/тенешюй со гндра1,/1пчсcKOiо цилиндра.
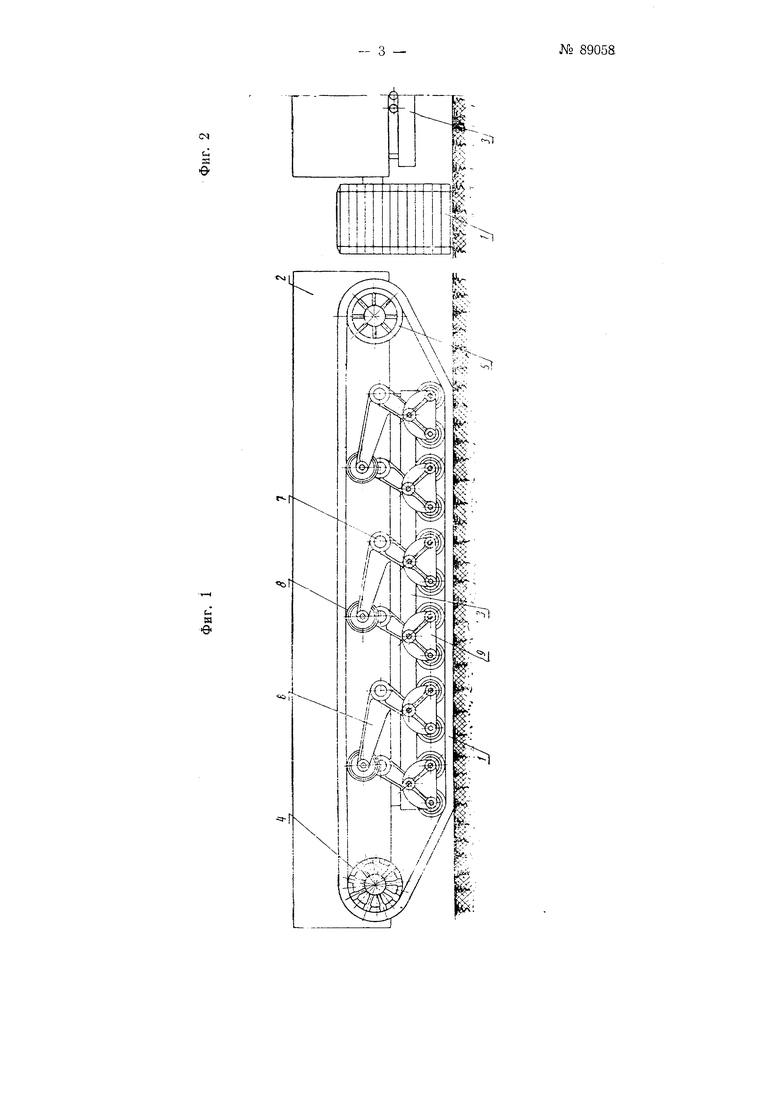
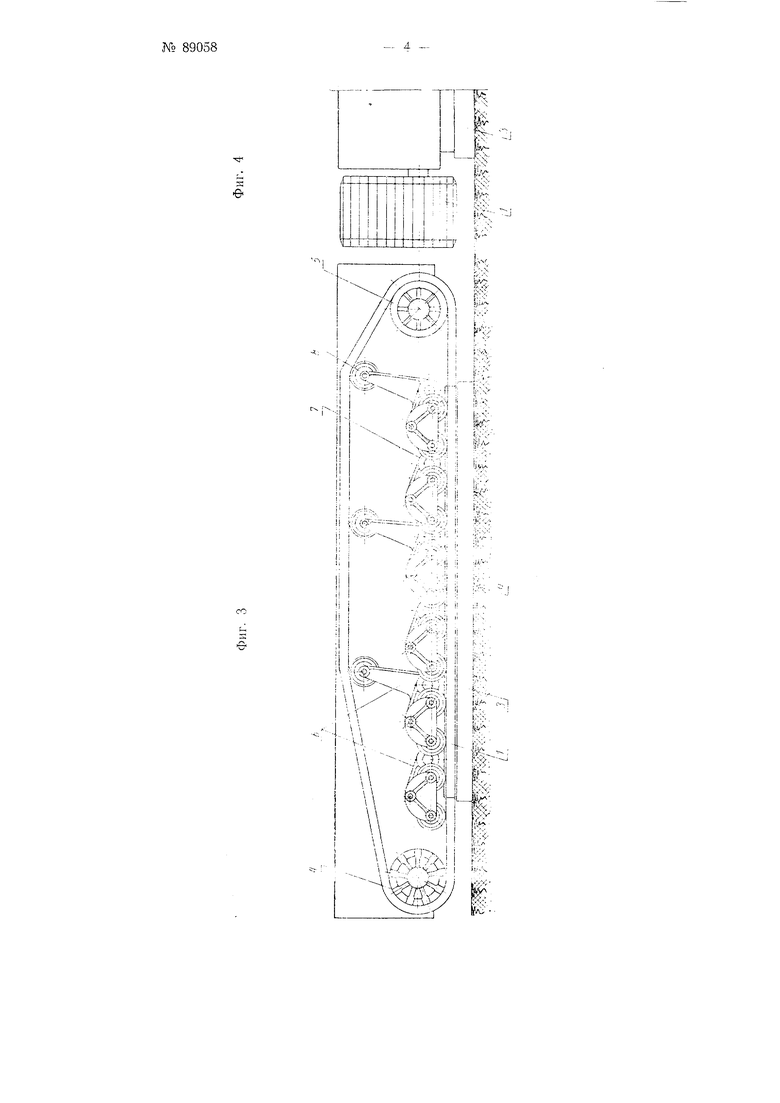
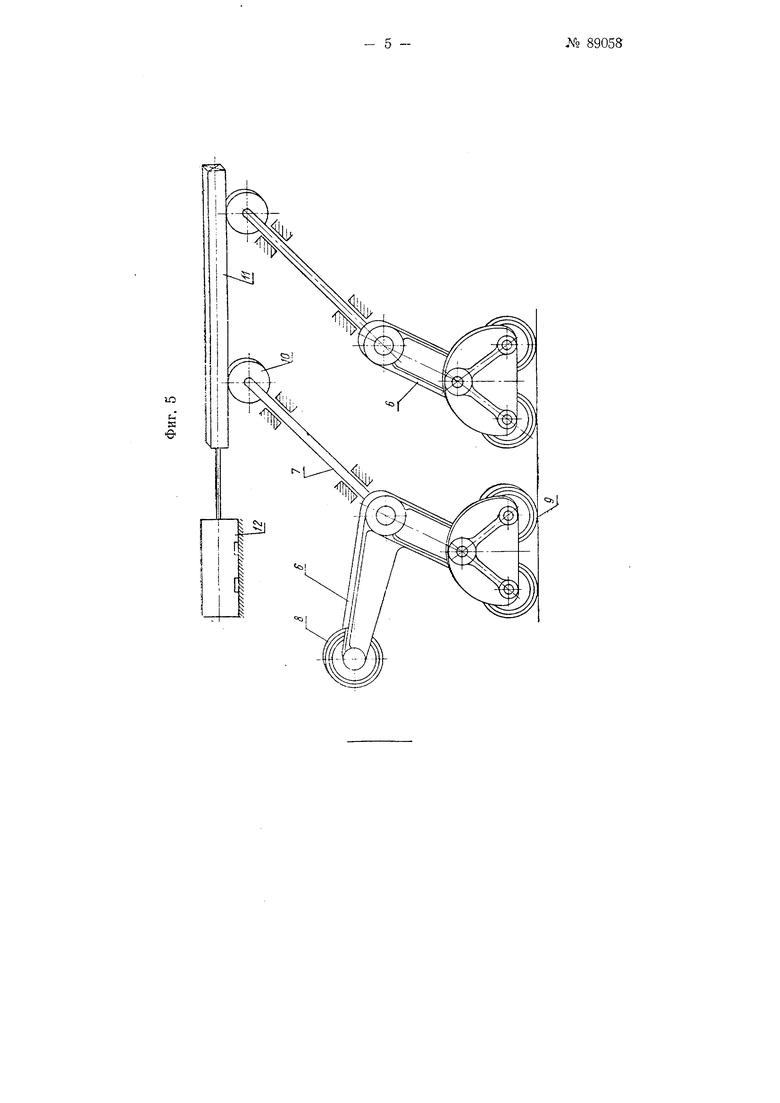
На фиг. 1 изображен вид 11ередви1аюн1.его механизма экскаватора во время его передвиже1П1я: }ц фиг. 2-вид его сзади; на (|)иг. 3-;5ид сбоку передвигающего геха;п зма во время процесса экскаг.ацни; па фиг. 4-вид его сзади; па (jjur. о-схема механизма для подъема гусениц.
При передвижепии по забою {фиг. 1-2) экскаватор опирается на две гусеничных ленты /, распо. оженные симметрично по обе стороны платформы 2; при этом опоркап база 3 поднята над уровнем ТК1ЧВЫ на ficKOTOpyto высоту. При
процесс:- экскавации ((Ьнг. 4) экскаватор OjiipaeTCH на опорную базу .У, а i ceii i4Hbie лент1 1 одняты над поверхностью почвы.
Гибкая гусеннчная ле1гга / приводнтся в движение звездочкой 4, кот()рая в свою очередь приводится 150 15|5ашение от электромотора редуктор. Колесо 5 служит д,1я ап 5а15лепия и натяжения г сеничiiof; .leriTbi.
контура гусеничной .ленгы ра.спо/южены рычат 6, которые моi- i поворачиваться 1к)круг ва.ча 7. На концах рычагов 6 помешены ро. 8, поддержива1оии1е верхнюю част15 гусеиично: лепты, на конце рычагов 6 помс:цены опорные тс.чежкп 9.
Прн пе;)едвижке экскаватора рычаги 6 занимают гп1жпее положение. Под действием веса, лтаплшы грунч- стремится повернуть рычаги вокруг валов 7; повороту рычагов (фи 5) препятствуют шестеренки 10. насаженные па дрхгой конец вала 7. Шестеренки 10 передают усилие на рейку //, которая удерживается в заданном положе1п-1и б.чагодаря сочлененпю со штоком гндра,И1ческого цнлнпдра 12. По окончании процесса передвияскн
рейке // посредством ; лд;1йз;::;Ч1 -ского ци;1индра 12 придается лсступательпое движение вправо, г шестеренкам 10-вращате.тьдое движение. Рычаги 6 получают ;)змо) HocTij поворачиваться залах 7 (фиг. 1); платформа 2 с опорной базой 3 опускается па землю; продолжая перемениться, рейка поворачивает рычаги 6 в крайнее верхнее положение (фиг. 3). Таким образом, за полпый ход рейки п|10исходит опускание п.татформы с опорной базой на землю и перетяжка гу-сенйчцых лепт в веохпее положение.
П {) е д м е т изобретения
1. Э| скава10р, о т л и ч а ю ni и йс я совокупным применением опорHoii базы и подъемно-опускных гусениц, сл жан1их для передвижения экскаватора и убираюн,нхея при вь;емке грунта.
2. Форма выполнения экскаватора по п. 1, о т ;i н ч а ю HI а я с я , гго для подъема и опускания гусениц применены закрепленные на валах поворотные рычаги с поддерживающими роликами и оиорными тележками и шестерни, сидящие на валах рычагов и зацеп.пяюгдиеся с рейкой, соч.тенепной со иггоком гидравлического цилиндра.
см
i
1

| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный траншейный экскаватор | 1954 |
|
SU104698A1 |
| САМОХОДНЫЙ ПОДЪЕМНЫЙ КРАН И СПОСОБ ОБЕСПЕЧЕНИЯ ЕГО РАБОТЫ | 2008 |
|
RU2467946C2 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| АМФИБИЯ ГУСЕНИЧНОГО ТИПА С ЗЕМЛЕРОЙНЫМ ОБОРУДОВАНИЕМ | 1992 |
|
RU2085408C1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| МАШИНА ДЛЯ ВЫРЕЗЫВАНИЯ НЕПОСРЕДСТВЕННО ИЗ ПОРОДЫ КАМНЕЙ ПРАВИЛЬНОЙ ФОРМЫ | 1935 |
|
SU47223A1 |
| Переставитель стеклоизделий | 1956 |
|
SU109898A1 |
| ЭЛЕКТРОПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ДЕМОНСТРАЦИИ СНИМКОВ | 1994 |
|
RU2122228C1 |
| Устройство управления экскаватором типа прямая лопата | 1982 |
|
SU1082915A1 |
| ЛЕСТНИЧНЫЙ ГУСЕНИЧНЫЙ ПОДЪЕМНИК | 2019 |
|
RU2768298C2 |
k
е
