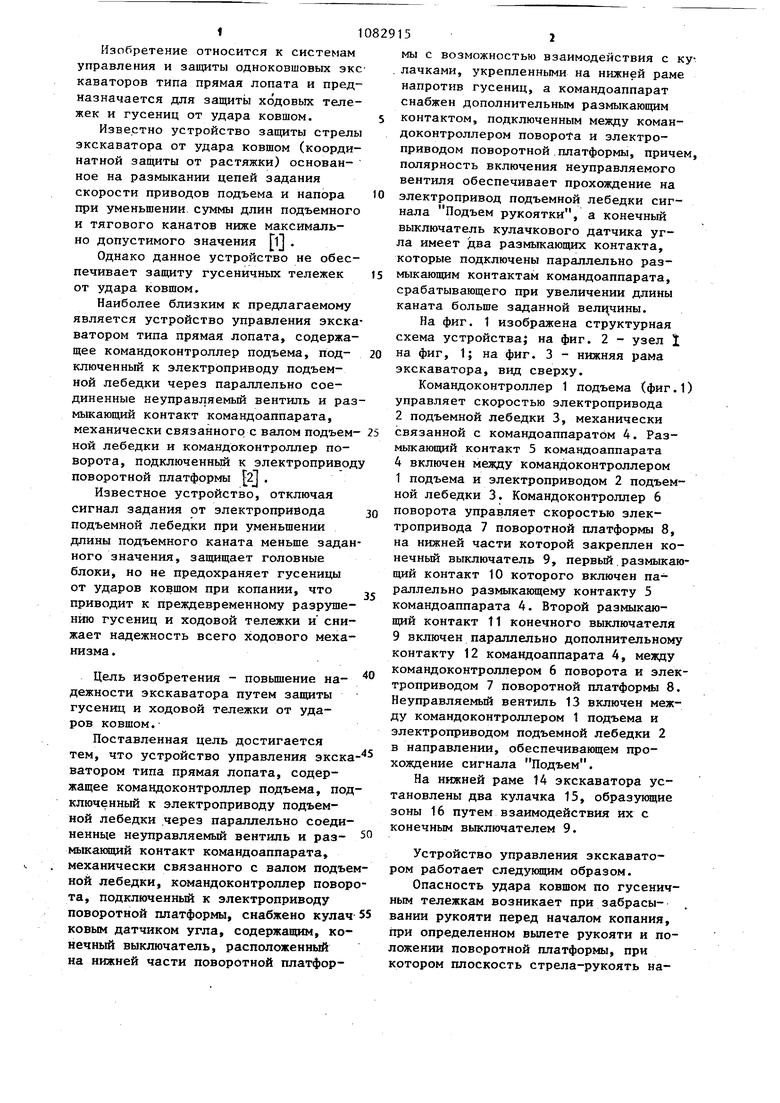
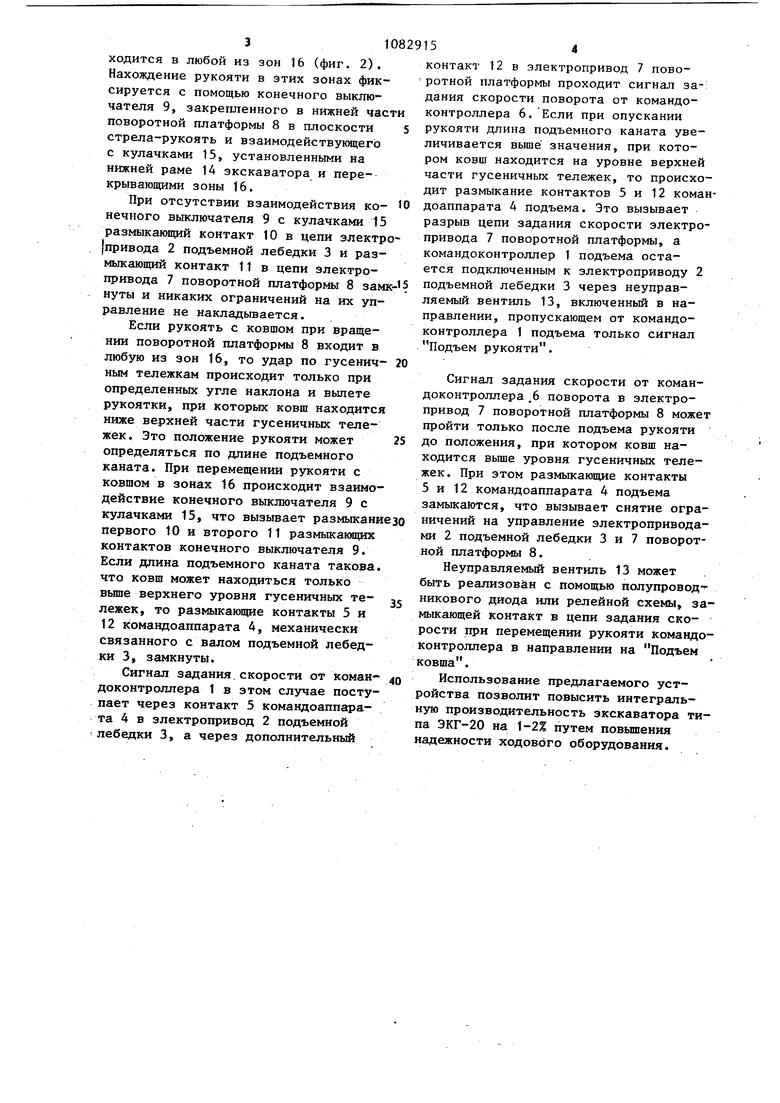
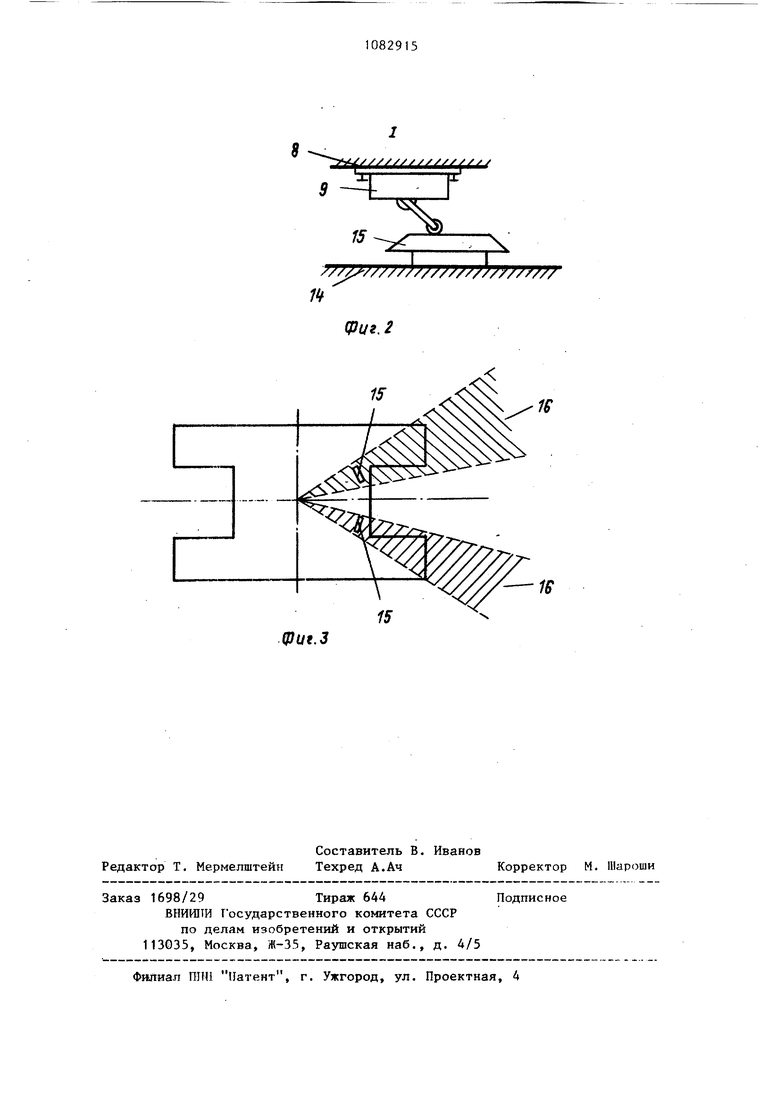
1 Изобретение относится к системам управления и защиты одноковшовых экс каваторов типа прямая лопата и предназначается для защиты ходовых тележек и гусениц от удара ковшом. Известно устройство защиты стрелы экскаватора от удара ковшом (координатной защиты от растяжки) основанное на размыкании цепей задания скорости приводов подъема и напора при уменьшении, суммы длин подъемного и тягового канатов ниже максимально допустимого значения lj . Однако данное устройство не обеспечивает защиту гусеничных тележек от удара ковшом. Наиболее близким к предлагаемому является устройство управления экска ватором типа прямая лопата, содержащее командоконтроллер подъема, подключенный к электроприводу подъемной лебедки через параллельно соединенные неуправляемый вентиль и раз мыкающий контакт командоаппарата, механически связанного с валом подъем ной лебедки и командоконтроллер поворота, подключенный к электропривод поворотной платформы 2j . Известное устройство, отключая сигнал задания от электропривода подъемной лебедки при уменьшении длины подъемного каната меньше задан ного значения, защищает головные блоки, но не предохраняет гусеницы от ударов ковшом при копании, что приводит к преждевременному разрушению гусениц и ходовой тележки и снижает надежность всего ходового механизма. Цель изобретения - повьш ение надежности экскаватора путем защиты гусениц и ходовой тележки от ударов ковшом. Поставленная цель достигается тем, что устройство управления экска ватором типа прямая лопата, содержащее командоконтроллер подъема, под ключенный к электроприводу подъемной лебедки через параллельно соединенные неуправляемый вентиль и размыкакяций контакт командоаппарата, механически связанного с валом подъе ной лебедки, командоконтроллер повор та, подключенный к электроприводу поворотной платформы, снабжено кулач ковым датчиком угла, содержащим, конечный выключатель, расположенный на нижней части поворотной платфор152мы с возможностью взаимодействия с ку лачками, укрепленными на нижней раме напротив гусениц, а командоаппарат снабжен дополнительным размыкающим контактом, подключенным между командоконтроллером поворота и электроприводом поворотной платформы, причем, полярность включения неуправляемого вентиля обеспечивает прохождение на электропривод подъемной лебедки сигнала Подъем рукоятки, а конечный выключатель кулачкового датчика угла имеет два размыкающих контакта, которые подключены параллельно размыкающим контактам командоаппарата, срабатывающего при увеличении длины каната больше заданной величины. На фиг. 1 изображена структурная схема устройства; на фиг. 2 - узел 1 на фиг, 1; на фиг. 3 - нижняя рама экскаватора, вид сверху. Командоконтроллер 1 подъема (фиг.1) управляет скоростью электропривода 2 подъемной лебедки 3, механически связанной с командоаппаратОм 4. Размьжающий контакт 5 командоаппарата 4 включен между командоконтроллером 1 подъема и электроприводом 2 подъемной лебедки 3. Командоконтроллер 6 поворота управляет скоростью электропривода 7 поворотной платформы 8, на нижней части которой закреплен конечный выключатель 9, первый.размыкающий контакт 10 которого включен параллельно размыкающему контакту 5 командоаппарата 4. Второй размыкающий контакт 11 конечного выключателя 9 включен параллельно дополнительному контакту 12 командоаппарата 4, между командоконтроллером 6 поворота и электроприводом 7 поворотной платформы 8. Неуправляемый вентиль 13 включен между командоконтроллером 1 подъема и электроприводом подъемной лебедки 2 в направлении, обеспечивающем прохождение сигнала Подъем. На нижней раме 14 экскаватора установлены два кулачка 15, образующие зоны 16 путем взаимодействия их с конечным выключателем 9. Устройство управления экскаватором работает следукнцим образом. Опасность удара ковшом по гусеничным тележкам возникает при забрасывании рукояти перед началом копания, при определенном выпете рукояти и положении поворотной платформы, при котором плоскость стрела-рукоять находится в любой из зон 16 (фиг. 2). Нахождение рукояти в этих зонах фиксируется с помощью конечного выключателя 9, закрепленного в нижней час поворотной платформы 8 в плоскости стрела-рукоять и взаимодействукидего с кулачками 15, установленными на нижней раме 1А экскаватора и перекрывающими зоны 16.
При отсутствии взаимодействия ковечного выключателя 9 с кулачками 15 размыкающий контакт 10 в цепи электр привода 2 подъемной лебедки 3 и размыкающий контакт 11 в цепи электропривода 7 поворотной платформы 8 зам нуты и никаких ограничений на их управление не накладывается.
Если рукоять с ковшом при вращении поворотной платформы 8 входит в любую из зон 16, то удар по гусеничным тележкам происходит только при определенных угле наклона и вылете рукоятки, при которых ковш находится ниже верхней части гусеничных тележек. Это положение рукояти может определяться по длине подъемного каната. При перемещении рукояти с ковшом в зонах 16 происходит взаимодействие конечного выключателя 9 с кулачками 15, что вызьгоает размыкани первого 10 и второго 11 размыкакмцих контактов конечного выключателя 9. Если длина подъемного каната такова, что ковш может находиться только Bbmie верхнего уровня гусеничных тележек, то размыкающие контакты 5 и 12 командоаппарата 4, механически связанного с валом подъемной лебедки 3, замкнуты.
Сигнал задания.скорости от командоконтроллера 1 в этом случае поступает через контакт 5 командоаппарата 4 в электропривод 2 подъемной лебедки 3, а через дополнительный
контакт 12 в электропривод 7 поворотной платформы проходит сигнал за-; Дания скорости поворота от командоконтроллера 6. Если при опускании рукояти длина подъемного каната увеличивается выше значения, при котором козш находится на уровне верхней части гусеничных тележек, то происходит размыкание контактов 5 и 12 командоаппарата 4 подъема. Это вызывает разрыв цепи задания скорости электропривода 7 поворотной платформы, а командоконтроллер 1 подъема остается подключенным к электроприводу 2 подъемной лебедки 3 через неуправляемый вентиль 13, включенньй в направлении, пропускающем от командоконтроллера 1 подъема только сигнал Подъем рукояти.
Сигнал задания скорости от командоконтроллера .6 поворота в электропривод 7 поворотной платформы 8 может пройти только после подъема рукояти до положения, при котором ковш находится вьш1е уровня гусеничных тележек. При этом размыкающие контакты 5 и 12 командоаппарата 4 подъема замыкаются, что вызывает снятие ограничений на управление электроприводами 2 подъемной лебедки 3 и 7 поворотной платформы 8.
Неуправляемый вентиль 13 может быть реализован с помощью полупроводникового диода или релейной схемы, замыкающей контакт в цепи задания скорости при перемещении рукояти командоконтроллера в направлении на Подъем ковша.
Использование предлагаемого устройства позволит повысить интегральную производительность экскаватора типа ЭКГ-20 на 1-2% путем повьш1ения надежности ходового оборудования.
/ 6 ///////////////7//77//
/ /
X
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления экскаватором типа "прямая лопата | 1983 |
|
SU1113490A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКСКАВАЦИЕЙ ГРУНТА И ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2436900C2 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1967 |
|
SU192087A1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| Стекерный экскаватор-лопата | 1947 |
|
SU79777A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР СИСТЕМЫ ИНЖЕНЕРА КУРКОВА | 1991 |
|
RU2005855C1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| КОЗЫРЕК КОВША ЭКСКАВАТОРА | 2022 |
|
RU2826071C2 |
| Экскаватор - прямая механическая лопата | 1988 |
|
SU1661285A1 |
УСТРОЙСТВО УПРАВЛЕНИЯ ЭКСКАВАТОРОМ ТИПА ПРЯМАЯ ЛОПАТА, содержащее командоконтроллер подъема, подключенный к электроприводу подъемной лебедки через параллельно соединенные неуправляемый вентиль и размыкающий контакт командоаппарата, механически связанного с валом подъемной лебедки, командоконтроллер поворота. 1 / п г п Щёл-J f ч / « . I 5 f tt « подключенный к электроприводу поворотной платформы, отличающееся тем, что, с целью повышения надежности экскаватора путем защиты гусениц и ходовой тележки от ударов ковшом, оно снабжено кулачковым датчиком угла, содержащим конечный выключатель расположенный на нижней части поворотной платформы с возможностью взаимодействия с кулачками, укрепленными на нижней раме напротив гусениц, а командоаппарат снаб жен дополнительным размыкающим контактом, подключенным между командоконтроллером поворота и электропривоi дом поворотной платформы, причем полярность включения неуправляемого (Л вентиля обеспечивает прохождение на электропривод подъемной лебедки сигнала Подъем рукояти, а конечный выключатель кулачкового датчика угла имеет два размыкающих кoнтaктa которые подключены параллельно размыкающим контактам командоаппарата, срабатывающего при увеличении длины каната больше заданной величины. с /
fPUi.2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления электроприводами подъема и тяги драглайна | 1974 |
|
SU641038A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Буль Ю.Я | |||
| и др | |||
| Одноковшовые экскаваторы | |||
| М., Недра, 1978 с | |||
| Универсальный двойной гаечный ключ | 1920 |
|
SU169A1 |
