(54) МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПОСТУПАТЕЛЬНОЕ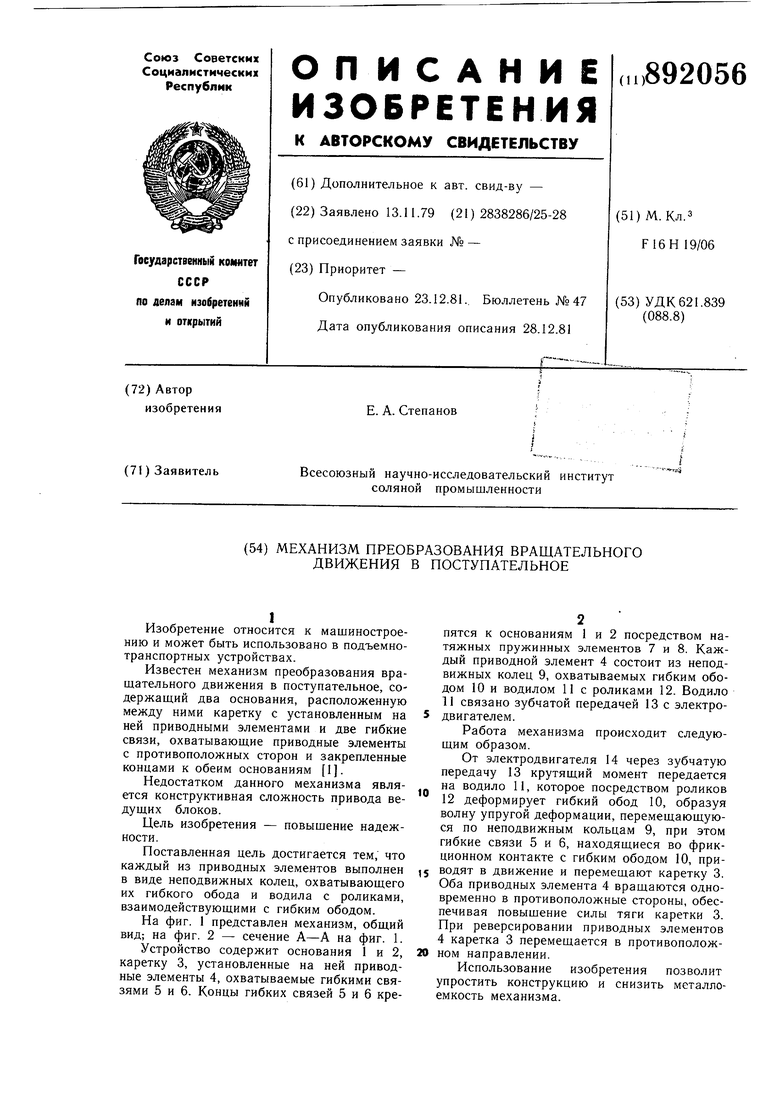
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля изделий | 1990 |
|
SU1781598A1 |
| ПРИБОР ДЛЯ НОЖНЫХ ПРОЦЕДУР | 2004 |
|
RU2343897C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ В НЕПРЕРЫВНОЕ ВРАЩАТЕЛЬНОЕ И МЕХАНИЗМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505722C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С МУСКУЛЬНЫМ ДВИГАТЕЛЕМ | 1992 |
|
RU2033367C1 |
| Механизм преобразования возвратно-поступательного движения в непрерывное вращательное | 2016 |
|
RU2629584C2 |
| Механизм привода промышленного робота | 1989 |
|
SU1660959A1 |
| Устройство для преобразования энергии волн в электрическую энергию | 2018 |
|
RU2705690C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ | 2002 |
|
RU2219397C1 |
| Устройство для шаговой подачи полосового и ленточного материала в зону обработки | 1991 |
|
SU1784375A1 |
| ДВИГАТЕЛЬ ВОДНОГО ТРАНСПОРТА | 2008 |
|
RU2412362C2 |
1
Изобретение относится к машиностроению и может быть использовано в подъемнотранспортных устройствах.
Известен механизм преобразования вращательного движения в поступательное, содержащий два основания, расположенную между ними каретку с установленным на ней приводными элементами и две гибкие связи, охватывающие приводные элементы с противоположных сторон и закрепленные концами к обеим основаниям 1.
Недостатком данного механизма является конструктивная сложность привода ведущих блоков.
Цель изобретения - повышение надежности.
Поставленная цель достигается тем, что каждый из приводных элементов выполнен в виде неподвижных колец, охватывающего их гибкого обода и водила с роликами, взаимодействующими с гибким ободом.
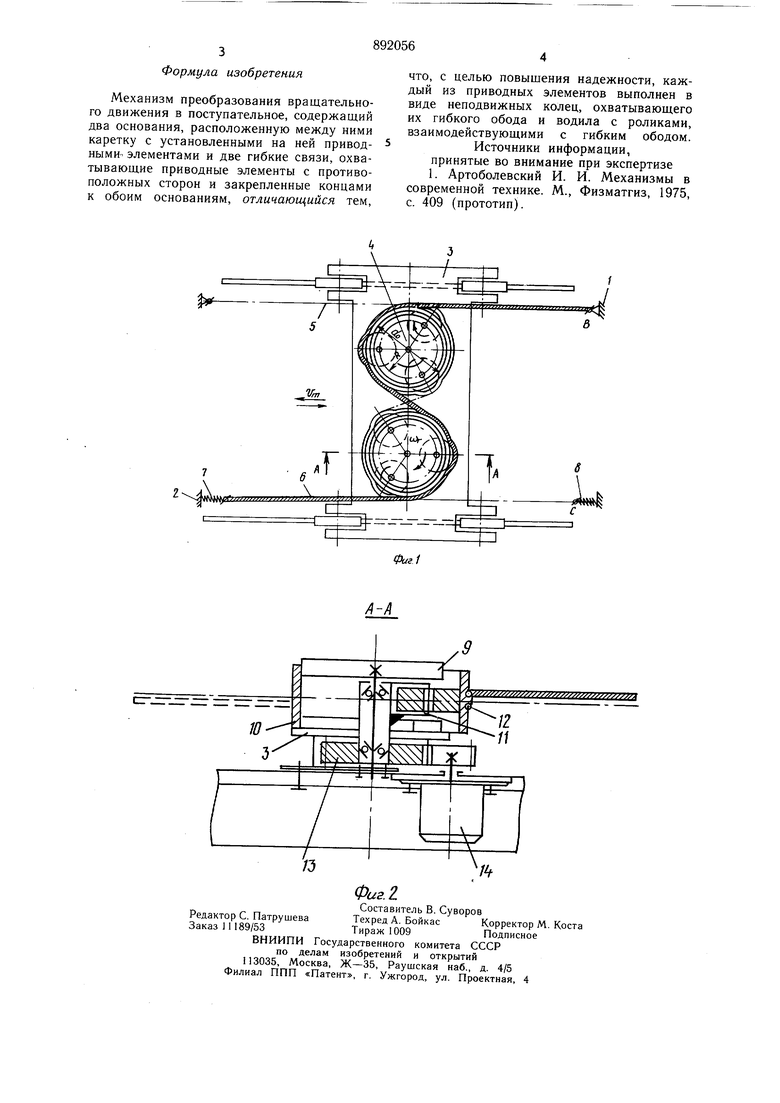
На фиг. 1 представлен механизм, общий ВИД; на фиг. 2 - сечение А-А на фиг. 1.
Устройство содержит основания 1 и 2, каретку 3, установленные на ней приводные элементы 4, охватываемые гибкими связями 5 и 6. Концы гибких связей 5 и 6 крепятся к основаниям 1 и 2 посредством натяжных пружинных элементов 7 и 8. Каждый приводной элемент 4 состоит из неподвижных колец 9, охватываемых гибким ободом 10 и водилом 11 с роликами 12. Водило
11связано зубчатой передачей 13 с электродвигателем.
Работа механизма происходит следующим образом.
От электродвигателя 14 через зубчатую передачу 13 крутящий момент передается на водило 11, которое посредством роликов
10
12деформирует гибкий обод 10, образуя волну упругой деформации, перемещающуюся по неподвижным кольцам 9, при этом гибкие связи 5 и 6, находящиеся во фрикционном контакте с гибким ободом 10, приJ5 водят в движение и перемешают каретку 3. Оба приводных элемента 4 вращаются одновременно в противоположные стороны, обеспечивая повышение силы тяги каретки 3. При реверсировании приводных элементов 4 каретка 3 перемещается в противоположном направлении.
Использование изобретения позволит упростить конструкцию и снизить металлоемкость механизма.
Формула изобретения
Механизм преобразования вращательного движения в поступательное, содержащий два основания, расположенную между ними каретку с установленными на ней приводными- элементами и две гибкие связи, охватывающие приводные элементы с противоположных сторон и закрепленные концами к обоим основаниям, отличающийся тем.
что, с целью повышения надежности, каждый из приводных элементов выполнен в виде неподвижных колец, охватывающего их гибкого обода и водила с роликами, взаимодействующими с гибким ободом.
Источники информации, принятые во внимание при экспертизе 1. Артоболевский И. И. Механизмы в современной технике. М., Физматгиз, 1975, с. 409 (прототип).
