ел
00
,1605307
лем 1 и инвертором 2 тока, к выходу которого подключён асинхронный дви гатель 3 с датчиком А частоты враще кия на валу, блок 5 автоматического регулирования частоты и. тока, задат чик 6, блок 7 определения гладкой составляющей момента, блок 9 опреде- |ления проекций гладкой составляющей I тока и блок 12 определения составляю IQ щих потокосцепления, введены логический блок ,15 преобразований фазных то
ков, блок 16 определения составляющих реального тока, блок 17 определения пульсирующего составляющего момента и регулятор 19 момента, соединенный выходом с блоком 5 автоматического регулирования частоты и тока. При этом обеспечивается коррекция задания на ток в зависимости от измеренных пульсаций момента, благодаря чему повышается точность формирования момента. 1 з.п,ф-лы, 10 ил.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения пульсаций момента асинхронных двигателей | 1988 |
|
SU1606882A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Устройство для определения скольжения асинхронного двигателя | 1989 |
|
SU1720137A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1398061A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1677840A2 |

Изобретение относится к электротехнике и может быть использовано в автоматизированном тиристорном электроприводе переменного тока общепромышленного назначения. Целью изобретения является улучшение качества регулирования путем повышения точности формирования момента в переходных режимах и уменьшение неравномерности вращения на низких частотах. В частотно-регулируемый электропривод, содержащий преобразователь частоты, выполненный с управляемым выпрямителем 1 и инвертором 2 тока, к выходу которого подключен асинхронный двигатель 3 с датчиком 4 частоты вращения на валу, блок 5 автоматического регулирования частоты и тока, задатчик 6, блок 7 определения гладкой составляющей момента, блок 9 определения проекций гладкой составляющей тока и блок 12 определения составляющих потокосцепления, введены логический блок 15 преобразований фазных токов, блок 16 определения составляющих реального тока, блок 17 определения пульсирующего составляющего момента и регулятор 19 момента, соединенный выходом с блоком 5 автоматического регулирования частоты и тока. При этом обеспечивается коррекция задания на ток в зависимости от измеренных пульсаций момента, благодаря чему повышается точность формирования момента. 1 з.п. ф-лы, 10 ил.
Изобретение относится к электротехнике и может быть использовано в автоматизированном тиристорном электроприводе переменного тока общепро- мьшшенного назначения.
Цель изобретения - улучшение качества регулирования путем повьппения точности формирования момента в пере ходных режимах и уменьшение неравномерности вращения на низких частотах.На фиг.1 приведена функциональная схема частотно-регулируемого электропривода; на фиг.2 - функциональная схема- блока автоматического регулирования частоты и Тока; на фиг.З и 4 - функциональная схема логического блока преобразований фазных токов и диаграммы его работы; на фиг.5 - схема для определения составляющих реального тока; на фиг.6 - функциональная- схема блока определения проекций гладкой составлякнцей тока; на фиг.7 - диаграмма работы блока управления в блоке определения проекций гладкой составляющей тока; на фиг.8 - функциональная схема блока определения составляющих потокосцеплений; на фиг.9 и 10 - системы координат и век- TopHbie диаграммы асинхронного двигателя..
Частотно-регулируемьй электропривод содержит преобразователь частоты выполненный с регулируемым выпрямителем 1 (фиг.1) и инвертором 2 тока, к выходу которого присоединен асин хроншш двигатель 3, на валу которог установлен датчик 4 частоты вращения вьЬсод которого подсоединен к первому входу блока 5 автоматического регулирования частоты и тока, второй вход которого соединен с выходом задатчи- ка 6 частоты вращения, третий вход - к выходу блока 7 определения гладкой
;:
0
5
0
5
0
5
0
5
составляющей момента, выход датчика 8 полного тока соединен с первым njtb- дом блока 9 определения проекций гладкой составляющей тока и с четвертым входом блока 5 автоматического регулирования частоты и тока, два выхода которого блока 10 задания частоты и блока 11 задания тока преобразователя часто -,., ты, выходы блока 9 определения проек-; ций гладкой составляющей тока соединены с первой группой входов блока 7 для определения гладкой составляющей момента, вторая группа входов которого соединена с первой группой выходов блока 12 определения составляющих потокосцепления. Электропривод содержит, кроме того, датчик 13 фазных токов и датчик 14 фазных напряжений, выход которого соединен с первым входом блока 12 определения составляющих потокосцепления.
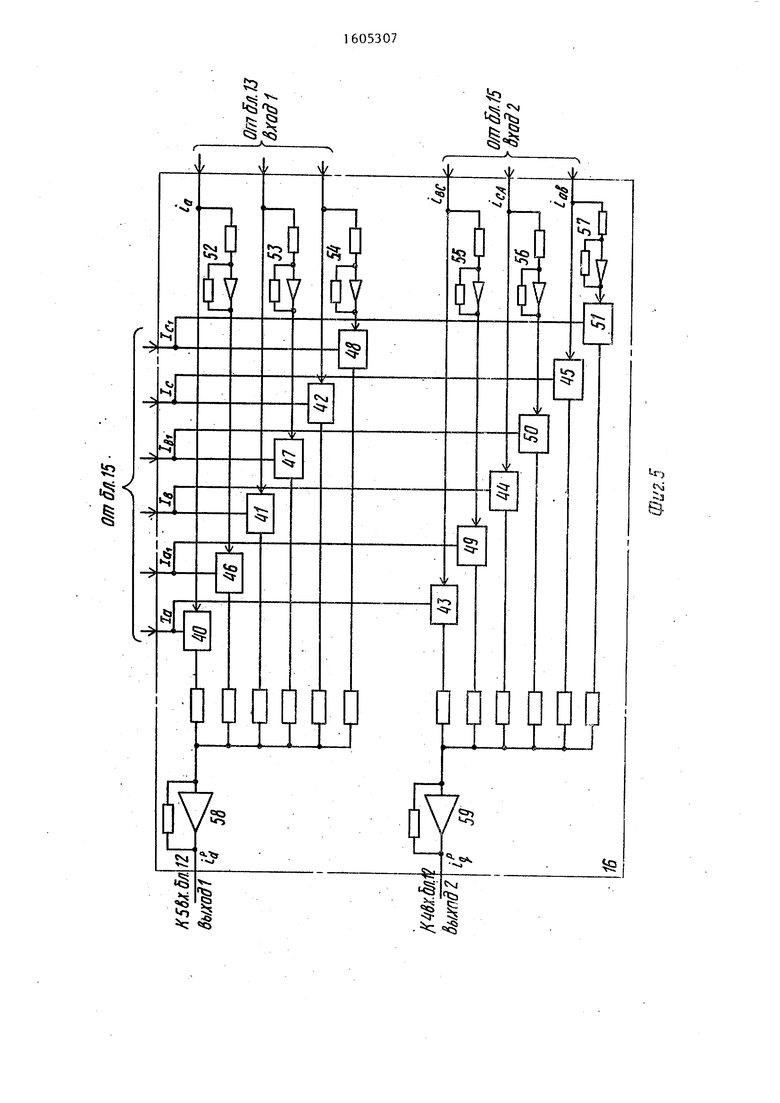
В частотно-регулируемый электропривод введены логический блок 15 преобразований фазных токов в линейные токи с тремя выходами, блок 16 определения проекций реального тока с тремя входами и двумя выходами, блок 17 определения пульсирующей составляющей момента с двумя группами входов, блок 18 вычитания, регулятор 19 момента и блок 20 определения линейных напряжений. .Блок 9.определения проекций гладкой составляющей типа снабжен тремя дополнительными входами. Блок 12 определения составляющих потокосцепления снабжен шестью дополнительными входами и дополнительной группой выходов. Блок 10 за- дания частоты снабжен дополнительным выходом. Блок 5 снабжен дополнительным входом-, подключенным к выходу регулятора 19 момента. Выходы датчика : 13 фазных токов подключены к входу
5160
логического блока 15 преобразований - фазных токов и к первому входу блока 16 Первый выход логического блока 15 подключен .к второму входу блока опре деления проекций реального тока, Вто™ рой еход блока 15 подключен к второму входу блока 9 определения-проекций гладкой составляющей тока, к третьему входу блока 16 определения проекций реального тока и к второму входу блока 12. Третий выход логического бло ка 5 подключен к объединенным между собой третьим входам блоков 9 и 12. .Четвертый и пятый входы блока 12 подключены к соответствующим выходам блока 16, шестой вход блока 12 подключен к выходу блока .20 определения линейных напряжений, соединенного вхо дом с выходом датчика 14 фазных напряжений. Седьмой вход блока 12 объединен с четвертым входом блока .9 н подключен к дополнительному выходу блока 10 задания частоты.
30
i06e, группы выходов блока 1.2 подклю- 25 2, 43-45, 46-48, 49-51 ЧФиг.5) , первую и вторую группу инверторов 52-54, 55-57 соответственно и два сумматора 58 и 59. Управляющие входы ключей 40™ 51 -соединены с выходом дешифратора 39 логического блока 15, а неуправлякщие Еходы первой группы ключей 40-42 сое динены с выходами датчика 13 фазных токов непосредственно, а неуправляю- щие входы третьей группы ключей 46-48 соединены с выходами указанного датчика через первую группу инверторов 52-54, выходы первой и третьей i tynte ключей 40-42 и 46-48 соединены с входом сумматора 58, выход которого образует первый выход блока 16. Неуправля- ющие входы второй группы ключей 43-45 соединены с выходами сумматоров 30-32 логического блока 15 непосредственно, а неуправляющие входы четвертой груп-
-гены к входам блока 17 определения пульсирующей составляющей момента, выход которого и выход блока 7 определения гладкой составляющей момента подключены к входам блока 18 вычитания , соединенного выходом с входом регулятора момента.
Блок 5 автоматического регулирования частоты и тока содержит элемент.21сравнения (фиг,2), входы которого образуют первые два входа блока 5, а выход соединен с входом регулятора
22часто.ты вращения, выход которого соединен с функциональным преобразователем 23 задания тока и вторым элементом 24 сравнения, второй вход которого образует третий вход блока 5. Выход элемента 24 сравнения соединен с регулятором 25 момента.f выход кото-
35
40
рого соединен с сумматором 26, второй пы ключей 49-51 соединены с выходами вход которого соединен с первым вхо- этих сумматоров через вторую группу
дом блока 5. Выход сумматора 26 образует первьш выход блока 5 (с сигналом и г). Выход функционального преобразо вателя 23 задания тока соединен с сумматором 27, выход которого соединен с элементом 28 сравнения, второй вход которого и второй выход сумматора 27 образуют четвертый и пятый входы блока 5. Выход элемента 28 сравнения соединен с входом регулятора 29 тока, выход которого образует второй выход блока 5 (с -сигналом Ui) автоматического регу.пирования частоты и тока.
50
55
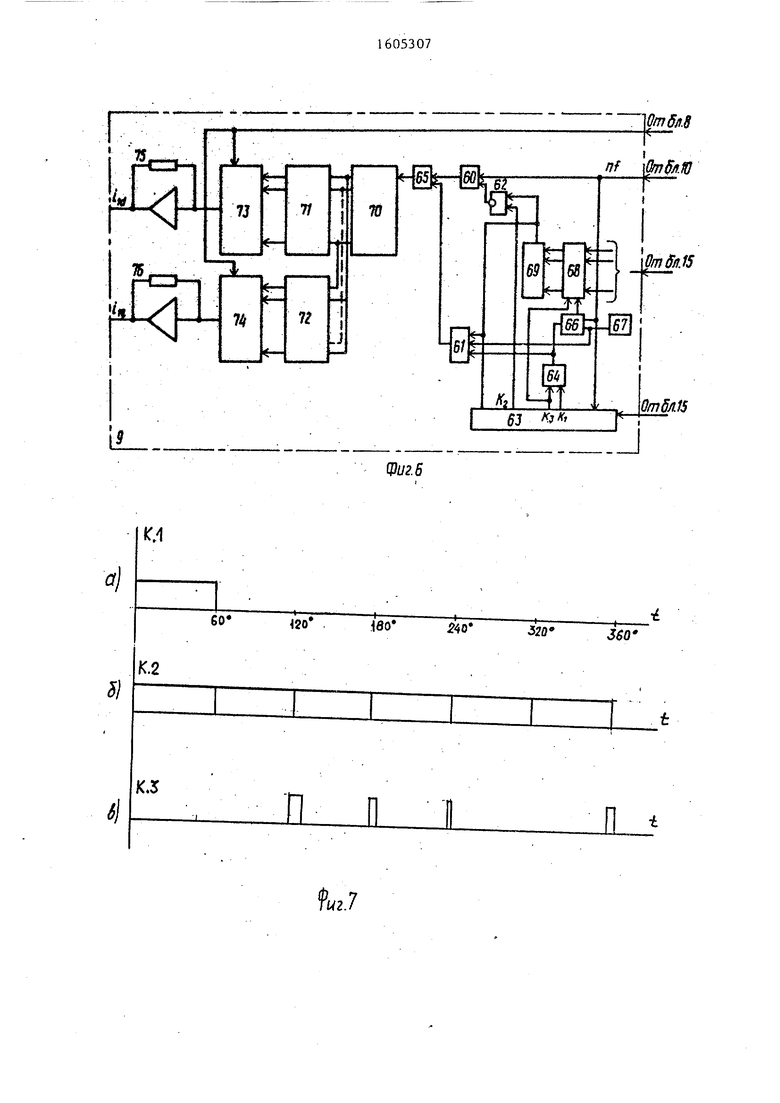
инверторов 55-57. Выходы второй 43-45 н четвертой групп ключей соеди нены с входом сумматора 59, выход которого образует второй выход блока 16 Блок 9 определения гладких составляющих тока содержит три элемента И 60-62 (фиг.6), блок 63 управления, два элемента ИЛИ 64 и 65, коммутат.ор 66, высокочастотный генератор 67, блок 68 ключей, счетчик 69,блок 70 делителей на два, генератор 71 функций Уолша для ап проксимации ко синусоидальных функций, генератор 72 функций Уолша для аппоок
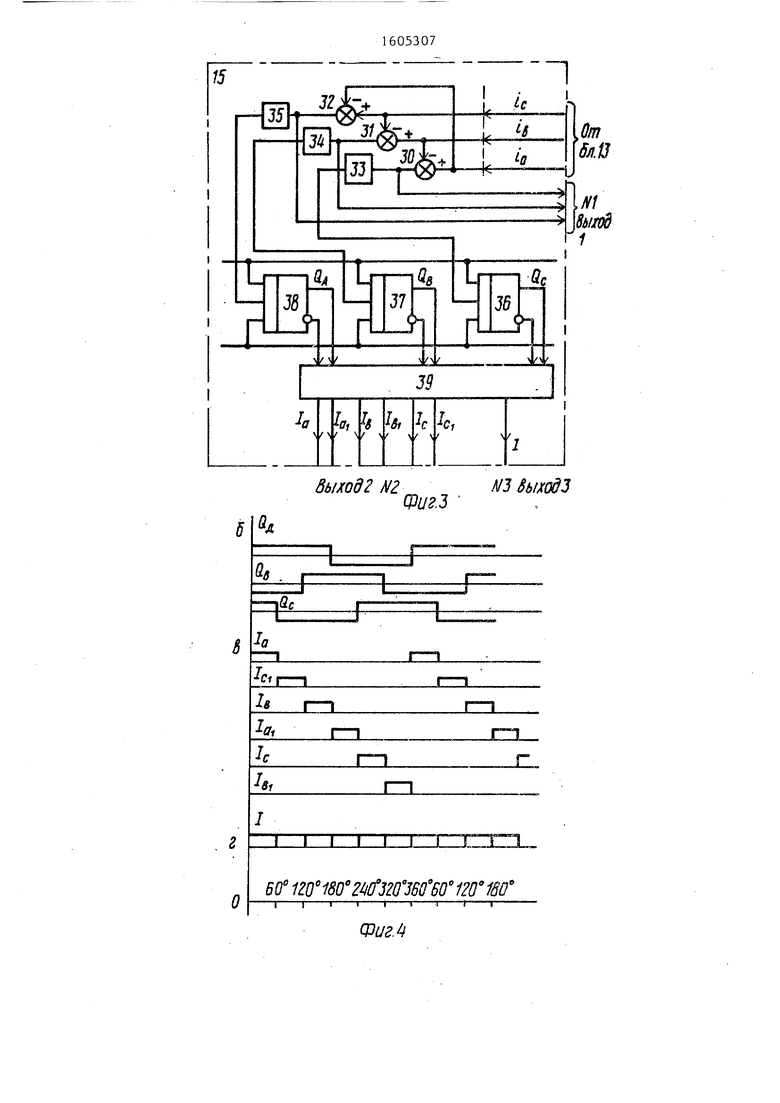
Логический блок 15 преобразований фазных токов содержит сумматоры 30-32 (фиг.З) нуль-органы 33-35, .счетные триггеры 36-38 и дешифратор 39. Первые входы сумматоров 30-32 образуют входы логического блока 15, Второй вход сумматора 30 подключен к первому входу сумматора 31, второй вход сумматора 31 подключен к первому входу сумматора 32, а второй вход сумматора 32 подключен к первому входу сум матора 30. Выходы сумматоров 30-32 определяют линейные токи и образ5тот первую группу выходов блока 15 и кроме того, через соответствующие нуль- органы 33-35 и счетные триггеры 36-38 подключены к входам дешифратора 39, выходы которого образуют вторую груп™ пу выходов логического блока 15 и третий его выход.
Блок 16 определения проекций реального тока содержит первую, вторую, . третью и четвертую группу ключей ДО ™.
инверторов 55-57. Выходы второй 43-45 н четвертой групп ключей соеди нены с входом сумматора 59, выход которого образует второй выход блока 16, Блок 9 определения гладких составляющих тока содержит три элемента И 60-62 (фиг.6), блок 63 управления, два элемента ИЛИ 64 и 65, коммутат.ор 66, высокочастотный генератор 67, блок 68 ключей, счетчик 69,блок 70 делителей на два, генератор 71 функций Уолша для аппроксимации ко синусоидальных функций, генератор 72 функций Уолша для аппооксимации синусоидальных функций, два блока аналоговых ключей 73 и 74, два сумматора 75 и 76. Дополнительный выход блока 10 задания частоты соединен с первым входом элемента И 60, с первым входом коммутатора 66 и с первым входом блока 63 управления, первый и третий выход которого через элемент ИЛИ 64 соединены с первым входом элемента И 61 и управляющим входом ком- мутатора.66, второй вход которого соединен с выходом генератора 67 и вторым входом элемента И 61. Кроме того.
10
деления, два ключа 98 и 99, два инт гратора 100 и 101 и два.координатны преобразователя 102 и 103.
Блок 77 для определения линейног напряжения, блок для определения де ствительной 78 и мнимой 79 составляющи напряжения выполнены также,как и соот ветствунщие блоки для определения с ставляющих-токов (фиг.З и 5).. Отлич заключается в том, чта фазные и лин ные токи замены соответственно фазн ми и линейными напряжениями.
В дифференцирующем блоке 80 опре
третий выход блока 63 управления Деляется модуль вектора напряжения.
динен с единичным управляющим входом блока 68 ключей. Выход коммутатора 66 соединен с неуправляющим входом блока 68 ключей, управляющие входы которого соединены с вторым выходом логическо- « го блока 15, третий выход которого соединен с вторым входом блока 63 управления. Выходы блока 68 ключей соединены с входами счетчика 69, выход которого соединен с третьим входом эле-25 мента И 61, с третьим входом блока : 63 управления и с первым входом элемента И 62, второй вход KOTOpo.ro соединен с вторым выходом блока 63 управления. Выход элемента И 62 соеДи- зо иен с вторым- входом элемента И 60, выход которого соединен с первым входом элемента ИЛИ 65, второй вход которого соединен с выходом элемента И 61, а выход элемента ИЛИ 69 соединен с входом блока 70 делителей на два. Выходы блока 70 делителей на два соединены с входами генераторов функций Уолша для синтеза косинусоидальных 71 и синусоидальных 72 функций, а выходы генератора 71 Уолша для синтеза косинусоидальных функций через блок 73 задания весовых коэффициентов соединен с первым сумматором 75. Выходы генератора 71 функций Уолша для синтеза синусоидальных функций через блок 74 задания весовых коэффиодентов соединен с вторым сумматором 76. Выход датчика 8 полного тока соединен с одним из входов блоков 73 и 74 задания весовых коэффициентов.
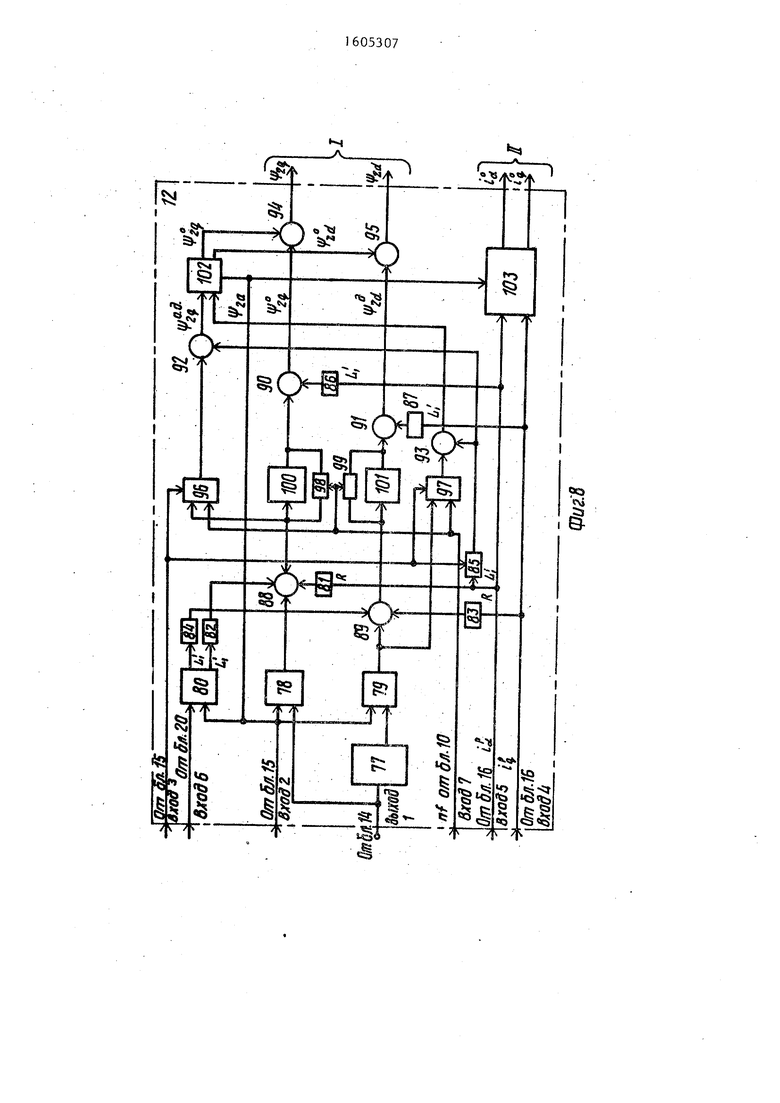
Блок 12 определения составляющих потокосцепления содержит блок 77 для определения линейного напряжения (фиг.8), блок для определения деист
35
40
45
50
а затем этот модуль дифференцируетс И умножается в гармонические функци синтез которых целесообразно осущес влять на функциях Уолша, что -позво- ляет процесс синтеза гармонических функций и процесс умножения объединить в одном блоке.
На управляющие входы блока для о ределения действительной 78 и мнимой 79 составляющих напряжения, диффере цирующего блока 80, координатные пр образователи 102 и 103 подается логи ческий сигнал с выхода блока 15 (с выхода 2), на .управляющие входы дели телей 96 и 97, ключей 98 и 99 и масш табного усилителя 85 подается логиче ский сигнал с выхода блока 15 (с выхода 3). Первый выход блока 16 (выход ij) соединен с входами масштабны усилителей 81, .85. и 86 и первым входом координатного преобразователя 10 а второй выход блока 16 (выход i) соединен с входами масштабньпс усилит телей 83 и 87 и вторым входом коорди натного преобразователя 103. Выход блока 78 определения действительной составляющей напряжения соединен с первым входом сумматора 88, второй вход которого через масштабный усили тель 81.соединен с выходом блока 16, а третий вход сумматора 88 соединен первым выходом дифференциального бло ка 80 через масштабный усилитель.82. блока 79 для определения мнимо составляющей напряжения соединен с первым входом делителя.97 и с первым входом сумматора 89, второй вход которого через масштабньй усилитель 83 соединен с соответствующим вьрсодом блока 16, Третий вход сумматора 89
- м Mcnui-- ujiuKa lo, хретии ВХОД сумматора оУ
вител. и мнимой 79 составляющих; соединен с. вторым выходом дифференнапряжений, дифференцирующий блок 80,, семь масштабных усилителей 81-87, семь cy мaтopoв 88-95, два блока 96 и 97
цирующего блока 80 через масштабный усилитель 84. Выход первого -сумматора 88 соединен с входом интегратора
деления, два ключа 98 и 99, два интегратора 100 и 101 и два.координатных преобразователя 102 и 103.
Блок 77 для определения линейного напряжения, блок для определения действительной 78 и мнимой 79 составляющих напряжения выполнены также,как и соот- ветствунщие блоки для определения составляющих-токов (фиг.З и 5).. Отличие заключается в том, чта фазные и линейные токи замены соответственно фазными и линейными напряжениями.
В дифференцирующем блоке 80 опреДеляется модуль вектора напряжения.
5 Деляется модуль вектора напряжения.
« 5 о
5
0
5
0
а затем этот модуль дифференцируется И умножается в гармонические функции синтез которых целесообразно осуществлять на функциях Уолша, что -позво- ляет процесс синтеза гармонических функций и процесс умножения объединить в одном блоке.
На управляющие входы блока для определения действительной 78 и мнимой 79 составляющих напряжения, дифференцирующего блока 80, координатные преобразователи 102 и 103 подается логический сигнал с выхода блока 15 (с выхода 2), на .управляющие входы делителей 96 и 97, ключей 98 и 99 и масштабного усилителя 85 подается логический сигнал с выхода блока 15 (с выхода 3). Первый выход блока 16 (выход ij) соединен с входами масштабных усилителей 81, .85. и 86 и первым входом координатного преобразователя 103, а второй выход блока 16 (выход i) соединен с входами масштабньпс усилит телей 83 и 87 и вторым входом координатного преобразователя 103. Выход блока 78 определения действительной составляющей напряжения соединен с первым входом сумматора 88, второй вход которого через масштабный усилитель 81.соединен с выходом блока 16, а третий вход сумматора 88 соединен с первым выходом дифференциального блока 80 через масштабный усилитель.82. блока 79 для определения мнимой составляющей напряжения соединен с первым входом делителя.97 и с первым входом сумматора 89, второй вход которого через масштабньй усилитель 83 соединен с соответствующим вьрсодом блока 16, Третий вход сумматора 89
ujiuKa lo, хретии ВХОД сумматора оУ
соединен с. вторым выходом дифференсоединен с. вторым выходом дифференцирующего блока 80 через масштабный усилитель 84. Выход первого -сумматора 88 соединен с входом интегратора
100,неуправляющим входом первого клга- ча 98 и первь1м входом первого делите- ля 96, второй вход которого объединен с вторым выходом блока 10. Выход сумматора 89 соединен с неуправляющим входом ключа 99 и входом интегратора
от сигналов на выходе дешифратора 39 (фиг.З). Например, если сигнал Появил ся на выходе 1д, то ось обмотки А сов-5
падает с положительным направлением системы координат и положение резуль тир тощего вектора в последующие момен ты времени будет отсчитьшаться относительно действительной оси, относительно ра 90, второй вход которого соединен ..-. опорной фазы.Если сигнач появится на вы- с выходом масштабного усилителя 86. ходе, например, Ig, то ось обмотки В сов- Выходы интегратора 1.01 и ключа 99 под- падает с положительным направлением сис- ключены к первому входу сумматора 91 ,. теь-м координат и положение результиру- второй вход которого соединен с выхо™ ющего вектора в последующие моменты дом масштабного усилителя 87, Выход времени описывается в допустимой сие- - масштабного усилителя 85 соединен с . теме координат. Однако его можно пере-
25
30
первыми входами сумматоров 92 и 93, Ъторой вход сумматора 92 соединен с вьтходом делителя 96, а второй вход сумматора 93 соединен с вьгходом дели- .j, теля .97, выходы сумг аторов 92 и- 93 подключены к входам координатного преобразователя 102, перззый. выход которого соединен с первым входом сумматора 94, второй вход которого соединен с выходом сумматора 90, Второй выход координатного преобразователя 102 соединен с первым входом суммато ра 95, второй вход которого соединен с выходом сумматора 91.
Выходы сумматоров 94 и 95 образуют первую группу выходов блока 12, определяющих .потокосцепление в неподвижной системе координат, а выходы координатного преобразователя 103 образ.у- JOT вторую группу выходов блока 12, определяющих проекции .токов в неподвижной опорной системе координат.
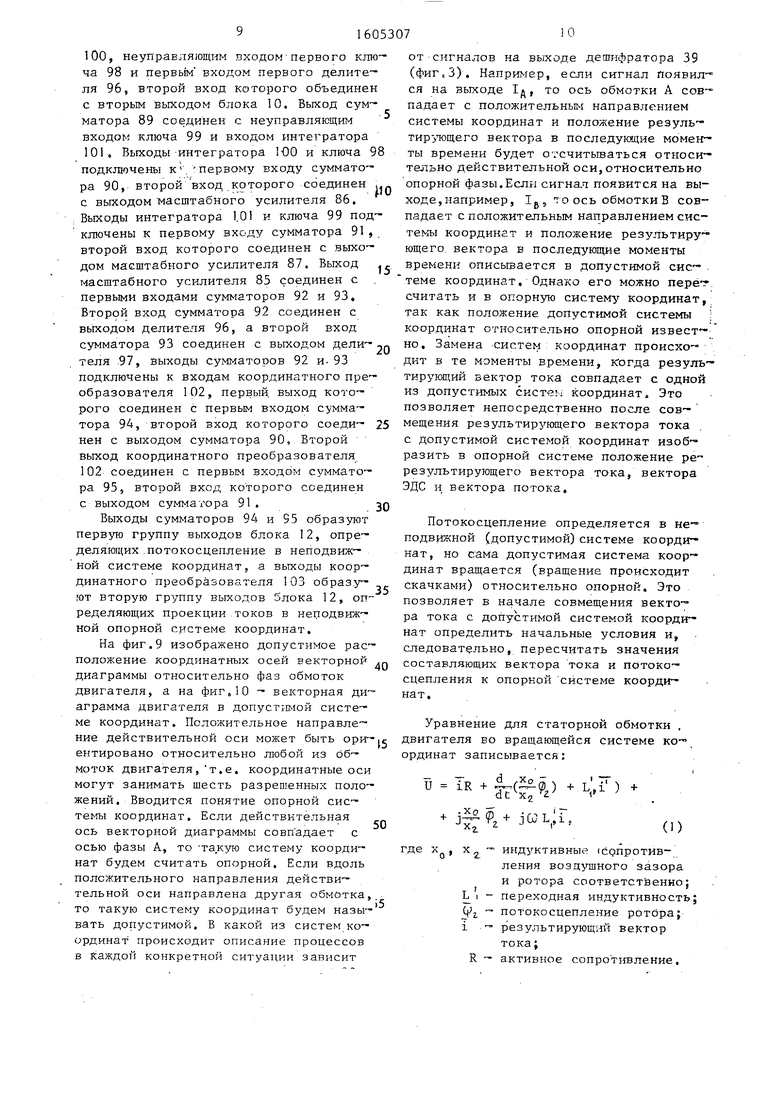
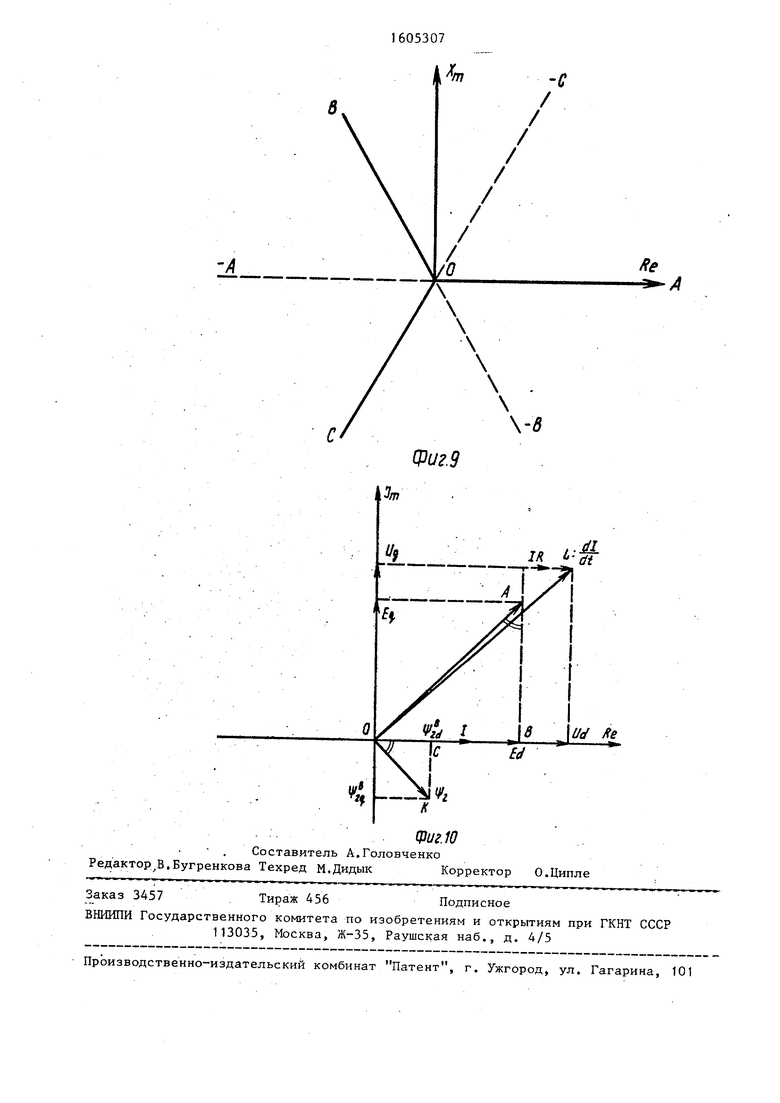
На фиг.9 изображено допустимое расположение координатных осей векторной диаграммы относительно фаз обмоток двигателя, а на фиг,10 - векторная диаграмма двигателя в допустимой системе координат. Положительное направление действительной оси может быть ори-,с ентировано относительно любой из обмоток двигателя, т.е. координатные оси могут занимать шесть разрешенных положений. Вводится понятие опорной сие- тегш координат. Если действительная ось векторной диаграммы совпадает с осью фазы А, то -та.кую систему координат буДем считать опорной. Если вдоль положительного направления действительной оси направлена другая обмотка,, то такую систему координат будем называть допустимой. В какой из систем координат происходит описание процессов в каждой конкретной ситуации зависит
считать и в опорную систем координат, так как положение допустимой системы ; координат относительно опорной извест - но, Замена систем : координат происходит в те моменты времени, Когда результирующий вектор тока совпадает с одной из допустимых систе.и координат. Это позволяет непосредственно после сов- мещения результирующего вектора тока с допустимой системой координат разить в опорной системе положение ре результирующего вектора тока, вектора ЭДС и вектора потока,
Потокосцепление определяется в не™ подвижной (допустимой) системе координат , но сама допустимая система координат вращается (вращение происходит 22 скачками) относительно опорной. Это позволяет в начале совмещения вектора тока с допустимой системой координат определить начальные условия и, следовательно, пересчитать значения составляющих вектора тока и потоко- сцепления к опорной системе координат.
Уравнение для статорной обмотки , двигателя во вращанлцейся системе координат записывается:
40
-.
- jf «р,-
vi )
(1)
где х, 2. индуктивные (Сопротивления возд тпного зазора и ротора соответственно; L I - переходная индуктивность; 2. ™ потокосцепление ротора; i - результирующий вектор
тока; R - активное сопротивление.
от сигналов на выходе дешифратора 39 (фиг.З). Например, если сигнал Появил ся на выходе 1д, то ось обмотки А сов-
считать и в опорную систем координат, так как положение допустимой системы ; координат относительно опорной извест - но, Замена систем : координат происходит в те моменты времени, Когда результирующий вектор тока совпадает с одной из допустимых систе.и координат. Это позволяет непосредственно после сов- мещения результирующего вектора тока с допустимой системой координат разить в опорной системе положение ре результирующего вектора тока, вектора ЭДС и вектора потока,
Потокосцепление определяется в не™ подвижной (допустимой) системе координат , но сама допустимая система координат вращается (вращение происходит скачками) относительно опорной. Это позволяет в начале совмещения вектора тока с допустимой системой координат определить начальные условия и, следовательно, пересчитать значения составляющих вектора тока и потоко- сцепления к опорной системе координат.
Уравнение для статорной обмотки , двигателя во вращанлцейся системе координат записывается:
-.
- jf «р,-
vi )
(1)
х, 2. индуктивные (Сопротивления возд тпного зазора и ротора соответственно; L I - переходная индуктивность; 2. ™ потокосцепление ротора; i - результирующий вектор
тока; R - активное сопротивление.
В уравнении (1) член (
X,
dt
ОП
ределяет трансформаторную ЭДС, а член j СО j. определяет ЭДС .вращения. Обо-
значим сумму этих ЭДС через Е и изобразим соответствующие члены уравнения (1) на векторной диаграмме (фиг.Го) ,5 с учетом того, что результирующий в:ек- тор тока совпадает с действительной осью и поэтому принимаем действительные значения, т.е.
IR + Ej
E +COL;
L bit
I,
(2) (3)
где Ej, Eft - проекции рсзультир: ющей ЭДС на координатные оси. Векторная диаграмма (фиг.10) справедлива для вращающейся системы координат. Причем, вращение осуществляется только с тех моментов времени, когда вектор тока -.совпадает 1с одной из допустимых осей координат. Следовательно, в этот момент времени потоко- сцеплениеимеет одно и то .же значение как в неподвижной гц(допустимой) , так и во вращагацейся ( - ,, ( la системах координат. Величины потоко- сцеплений для указанного момента времени определяются и векторной диаграммы
V г,
Нл-.:зи. %-1.ъ;,
со со
(4)
-и, - IR о ь,
dl
dt
(5)
Щ
W
Выражения (4) и (5) получены на основании подобия треугольников АОВ и ОСК (СД - коэффициент подобия). Отсюда следует, что, измеряя действительную и мнимую составляющие напряжения, составляющие тока (равную модулю в перво- начальньш момент времени) и зная параметры двигателя, можно определить 3на чения потокосцепления для начального момента времени для любой .из допустимых систем координат.
Как известно проекции результируюг г 21, (13) Так как известно 1 асположе}1ие допустимой системы координат, известны
щего вектора потокосцепления в неподвижной системе координат определяются начальные условия интеграторов, а те- по выражениям:i кущие значения проекций потокосцепле n f:b d- r f- « НИИ не зависят от выбора системы ко- ординат, то имеется возможность опрё-
,5
5
- L М
(6)
с)г
j(Uj,-Ri3-L, sinuOdt + о
З ° L l if
.еЧ 1 3t. 0.0 , л9
+ Ы° т zd
(7)
где1 , (, начальные значения интеграторов в допустимой системе коор-- динат, которые должны быть выбраны так, чтобы при t О (отсчет времени производится с момента совмещения тока с допустимой системой координат) свободные члены выражений (6) и (7) позволяли бы определить соответствующие значения (, Ц Jj. Так как при t О ifl, О, то получаем
Ю
(8)
+ I L
(9)
Таким образом, выбором начальных значений интеграторов определяются величины потокосцеплений В допустимой системе координат.
Введем обозначения fc
vL
1 ХдX.
Idl
I (Ug-i R-L,.g sin6jfJdt+
35
л.ц.
(10)
VM l7l d-d -L i-«« i
- L
(11)
(d
9 9
где .,j , текущие значения проекций потокосцеплений в допустимой системе координат. . - „
Следует отметить, что(,н(лпе зависят от выбора системы координат.
С учетом (10) и (11) (6) и (7) запишутся
выражения
50
м г,3 . 0,3 V2cl
(12)
м,-4
, (13) Так как известно 1 асположе}1ие допустимой системы координат, известны
начальные условия интеграторов, а те- кущие значения проекций потокосцеплеНИИ не зависят от выбора системы ко- ординат, то имеется возможность опрё-
делить проекции вектора потокесцепле - ния в опорной системе координат. Для этого начальные условия, определенные в допустимой системе координат, переводятся в опорную систему координат с помощью преобразования Парка.-
В координатном преобразователе 102 блока 12 (фиг.7) осуществляется ход к опорной системе координат сос тавляющих вектора потокосцепления, а в координатном преобразователе 103 переход к опорной системе координат составляющих вектора тока.
Переход на новую систему координат J5 Я fil выходной сигнал регулятора через 60 эл. град, дает возможность 19 момента, которьш зависит от пуль
синхронизировать фактическую частоту инвертора, задаваемую блоком 10, и синтезированную частоту гладких и реальных составляющих .тока. Для упрощения синхронизации с выхода блока 10 в блок 9 определения гладких составляю щих тока и блок 12 определения составляющих потокосцепления подается частотный сигнал п
сации вращающегося момента.
Сигнал 1-г, является сигналом ния амплитуды тока статора. UI - это
20 периодическая составляющая момента, которая вносит эффект в регулирование только в том случае, когда период частоты вращения двигателя превышает время регулирования регулятора 29 ти-
25 ка. Таким образом, на входе регулято™ ра 29 тока сравниваются сигнал зада™ ния тока I Ч- с сигналом полного тока (выход датчика 8) и выходной сигнал регу лятора тока Uu пост т1ает на вход
If J частота которого в фиксированное число раз, например 32 или 64, превышает основную гармонику инвертора. В блоке 10 аналоговый сигнал превращается в последовательность
импульсов, которые поступают на управ-зо блока 11. Кроме то го, сигнал задания ляющие входы автономного ршвертора 2 момента М- сравнивается на входе ре- через делитель с постоянным коэффици- гулятора 25 момента с фактический мо ентом деления. Частотный сигнал с вхо- ментом М, определенным для гармони- да делителя поступает на блок 9 определения гладких составляющих тока и блок 12 определения составляющих пото- косцепления. Если бы не было этой синхронизации, то всегда бы наблюдалось расхождение по частоте, которое приводит к фазовой погрешности, меняющейся в пределах (0-2)) рад. Следует указать, что фаза выходного тока инвертора из-за влияния устройств принудительной коммутации меняется при изменении частоты и режима работы дни- 45 первый вход блока 16 определения гателя. Применение синхронизации поз- проекций реальных токов. На выходах воляет уменьшить дестабилизирующие сумматоров 30-32 (фиг.З) формируются факторы, так как ошибка из-за неиден- линейные токи, в момент перехода ко- . тичности блоков 9 и 10 может накапли- торых через ноль на выходе ноль-орга- ваться только 3 пределах 60 эл.град.,при50 и° 33-35 появляются импульсы, кото- переходе на новую систему координат фазо- РЬ е подаются на счетные входы тригге- вая погрешность ликвидируется.
Частотно-регулируемый электропривод работает следующим образом.
На вход блока 5 автоматического 5 регулирования частоты и тока подает-
35
40
ческих составляющих токов. Сумма вы™ ходного сигнала регулятора 25 момента и датчика 4 частоты вращения является сигналом Uf, определяющим частоту инвертора, который подается на вход блока 10 задания частоты, где оно преобразуется в последовательност импульсов, частота которых пропорциональна сигналу Uf.
Фазные токи измеряются датчиком 13 и подаются в логический блок 15 и
ров 36-38. Диаграмма импульсов на выходах триггеров представлена на фиг.4, Дешифратор 39 из последователь.нос ти входных импульсов, формирует управ - ляющие импульсы на второй группе.выходов и третьем выходе блока 15, ди - аграммы которых представлены iia фиг. 4. . Каждьв управляющий импульс имеет ,дли-
ся сигнал выхода задатчика 6 частоты вращения. Блок 5 определяет ам- пл итуду и частоту переменного тока.
На входе регулятора 22 частоты враще™ ния сравниваются сигналы задания и обратной связи. Выходной ука- занного регулятора является заданием момента, который преобразуется в функциональном преобразователе 23 в сигнал задания амплитуды тока статора I. (I- - составляющая задания, зависящая от загрузки двигателя). В сумматоре 27 осуществляется суммирование сигналов
ЧА
Л1,
(U)
сации вращающегося момента.
Сигнал 1-г, является сигналом ния амплитуды тока статора. UI - это
периодическая составляющая момента, которая вносит эффект в регулирование только в том случае, когда период частоты вращения двигателя превышает время регулирования регулятора 29 ти-
ка. Таким образом, на входе регулято™ ра 29 тока сравниваются сигнал зада™ ния тока I Ч- с сигналом полного тока (выход датчика 8) и выходной сигнал регу лятора тока Uu пост т1ает на вход
блока 11. Кроме то го, сигнал задания момента М- сравнивается на входе ре- гулятора 25 момента с фактический мо ментом М, определенным для гармони- первый вход блока 16 определения проекций реальных токов. На выходах сумматоров 30-32 (фиг.З) формируются линейные токи, в момент перехода ко- торых через ноль на выходе ноль-орга- и° 33-35 появляются импульсы, кото- РЬ е подаются на счетные входы тригге-
блока 11. Кроме то го, сигнал задания момента М- сравнивается на входе ре- гулятора 25 момента с фактический мо ментом М, определенным для гармони- первый вход блока 16 определения проекций реальных токов. На выходах сумматоров 30-32 (фиг.З) формируются линейные токи, в момент перехода ко- торых через ноль на выходе ноль-орга- и° 33-35 появляются импульсы, кото- РЬ е подаются на счетные входы тригге-
ческих составляющих токов. Сумма вы™ ходного сигнала регулятора 25 момента и датчика 4 частоты вращения является сигналом Uf, определяющим частоту инвертора, который подается на вход блока 10 задания частоты, где оно преобразуется в последовательность импульсов, частота которых пропорциональна сигналу Uf.
Фазные токи измеряются датчиком 13 и подаются в логический блок 15 и
блока 11. Кроме то го, сигнал задания момента М- сравнивается на входе ре- гулятора 25 момента с фактический мо ментом М, определенным для гармони- первый вход блока 16 определения проекций реальных токов. На выходах сумматоров 30-32 (фиг.З) формируются линейные токи, в момент перехода ко- торых через ноль на выходе ноль-орга- и° 33-35 появляются импульсы, кото- РЬ е подаются на счетные входы тригге-
ров 36-38. Диаграмма импульсов на выходах триггеров представлена на фиг.4, Дешифратор 39 из последователь.нос ти входных импульсов, формирует управ - ляющие импульсы на второй группе.выходов и третьем выходе блока 15, ди - аграммы которых представлены iia фиг. 4. . Каждьв управляющий импульс имеет ,дли-
15160
тельность 60 эл.град, а сигнал на третьем выходе блока 15 представляет последовательность импульсов длитель - ностью 60 эл.град. i
На вход блока 6 определения проекций реального тока (фиг.5) от дат чика 13 тока подаются сигналы на не- управляющие входы первой группы ключей 40-42 непосредственно,а на неуправЛяю- щие входы третьей группы ключей 46-48 через первую группу инверторов 52-54. Линейные токи, которые определяются в блоке 5, подаются на управляющие входы второй группы ключей 43-45 не- посредственно, а на неуправляющие входы четвертой группы ключей 49-51 через вторую группу инверторов 55-57. В то же время на управляющие входы всех ключей подаются управляющие сигналы с выхода дещифратора 39. При поступлении какого-либо управляющего сигнала соответствующий ключ открывается и через масщтабные усилители 58 и 59 входные сигналы появляются на вькоде блока 16, определяющие проекции реального тока в неподвижной системе ко ординат. Причем появление какого-либо управляющего импульса приводит к соответствующему выбору одной из шести разрешенных ориентации систем коорди. н аг. После того, как длительность данного импульса закончилась, результирующий вектор тока повернулся на 60 зл. град.против часовой стрелки. По окон- чании импульса система координат мгновенно повернется на 60° эл.град. и догонит вектор тока. В новой системе координат в первоначальный момент вре мени результирующий вектор совпадает с действительной осью.
В любой момент времени результирующий вектор тока привязан к допустимой системе координат, что позволяет, используя преобразования Парка по логическим сигналам, определить поло жения вектора тока в опорной системе координат,
На первый вход элемента И 60, блока 9 (фиг.6), на первьв вход управля- ющего блока 63 и первый вход коммутатора 66 подается частотный сигнал п с выхода блока 10 управления частотой. Выход коммутато ра 66 соединен с неуправляющим входом блока 68 ключей на управляющие входы которого подается сигнал с выхода блока 15 (диаг- рамма фиг.4), а на второй вход блока 63 управления подается логический сиг16
нал с третьего выхода блока 15 (диаграмма фиг.4). По приходу первого импульса с логического блока 15 и по приходу первого импульса частотой п, на выходе блока 63 управления по каналам К1 и К2 выдаются управляющие импульсы (фиг.7), канал К2 подготавливает к срабатыванию элемент И 62, а канал К1 -через элемент ИЛИ 64 под- ютючает высокочастотный генератор 67 через соответствующий ключ блока 68 клшчей на заполнение счетчика 69. На время заполнения счетчика 69 на входе элемента И 61 появляется управляющий сигнал, по которому высокочастотные колебания с выхода генератора 67 через элемент ИЛИ 65 поступают на i блок 70 деления частоты на два. Счетчик 69 состоит из щести блоков. Емкость каждого блока соответствует числу импульсов, которые поворачивают синтезированнь1Й вектор тока на 60 эл. град. Это позволяет осуществить синтез вектора гладкого тока в опорной системе координат. Если, например, при включении системы регулирования реальный вектор тока находился между 180 и 240 эл.град.; то на входе блока 68 ключей действует сигнал 1д, , который вводит четыре блока и синтезированный вектор тока поворачивается;
на 240 эл.град и ждет реальный вектор тока, так как счетчик 69 заполнился, сработали элементы И 61 и И 62 и за- блокировали поступление импульсов на вход блока 70 делителя, т.е. осущест вилась глубокая синхронизация.
При действии следукщего импульса (в нащем примере 1) емкость счетчика 69 увеличивается на постоянную величину, а на выходе счетчика снова появляется нулевой сигнал. Меняется управляющий сигнал коммутатора 66 и счетчик 69 начинает заполняться частотой Пг более низкой, чем частота генератора. При этом может быть три случая: счетчик заполнился.раньше, чем кончился управляющий сигнал, счетчик не успел заполниться за время действия управлянлцего сигнала и сигналы закончились одновременно.
Первый случай означает, что синтезированный вектор тока опережает ре- альньш. В этом случае на выхо де счет- i чика 69 появляется импульс, .который совместно с импульсом по каналу К2 через элемент И 62 закрывает элемент ,И 60 и частотный сигнал п не посту-
17
- 1605307
пает в схему формирования гармоничес ких функций и вращение синтезирован - ного вектора тока прекращается.
Во втором случае синтезированньй вектор тока отстаёт от реального. За время действия управляющего сигнала по каналу К2 с выхода счетчика 69 на соответствующий вход блока 63 управ
18
В блоке 77 (фиг.8) определяется линейное напряжение, а в блока 78 и 79 определяются действительные и мнигг
;мые составляющие напряжения, В диф ференцирующем блоке-80 определяется модуль вектора тока, а затем этот модуль дифференцируется и умножается
на гармонические функции. На выходе
ления не поступает сигнал, подтверж- Q jсумматора 88 появляется сигнал, определяемьй подинтегральным выражением (6), а на выходе сумматора 89 появля ется сигнал, определяемый подынтегральным выражением (7).
При появлении управляющего импульса на третьем выходе логического блока 15 ключи 88 и 89 перестают шунти- ровать интегратор и начинается процесс интегрирования, т.е. определяют- - ся пр оекции вектора потокосцепления в допустимой системе координат, Выход первого интегратора 100 суммируется с выходом масштабного усилителя 86 и на
20
25
30
дающий заполнение счетчика 69. В этом случае блок 63 управления после окончания очередного сигнала по каналу К2.. формирует сигнал по каналу КЗ (фиг.7), который блокирует состояние 5 блока 68 ключей,а коммутатор 66 вновь подключает генератор 67 к счетчику 69 и высокая частота через элемент И 61 и ИЛИ 65 подается на вход блока 70 дё . лителей на два. Элемент И 61 будет открыт на время до заполнения счетчика 69, Так как синтез гармонических сигналов осуществляется от высокочастотной последовательности импульсов, то синтезированный вектор тока догоняет реальный. Как только счетчик 69 заполнится, на его выходе появляется импульс, который закрывает элемент И И 61 и снимает действие управляклцего сигнала по каналу КЗ, что увеличивает емкость счетчика 69 и переключает коммутатор 66 на частоту п. Время действия сигнала по каналу КЗ переменное и зависит от времени дозапол- нения счетчика.
В третьем случае реальный и синтезированные вектора токов вращаются с одинаковой угловой скоростью и сигнал по каналу КЗ не появляется. Последова- Q тельность импульсов с выхода блока 70 поступает на вход блоков 71 и 72. В блоке 71 из последовательности импульсов синтезируются функции Уолша, которые используются для аппроксимации ко-д синусоидальных колебаний, в блоке 72 синтезируются функции Уолша, которые используются для аппроксимации коси- нусоидальных колебаний. В блоках 73 и 74 синтезированные функции Уолша умножаются на соответствующие коэффи циенты,, которые . определяются выбором резисторов масштабных усилителей 75 и 76, и с помощью ключей подключаются к соответствующим входам масштабных усилителей.75 и 76. Причем фаза синтезированных колебаний гладкой соответствующей тока .будет соответство- вать фазе реального тока.
выходе сумматора 90 появляется сигнал Cf, , определяющий текущее значение
вектора потокосцепления в допустимой системе координат согласно выражению (10). Выход второго интегратора 101 суммируется с выходом масштабного уси-, лителя 87 и на выходе сумматора 91
,9
определяющий
50
55
появляется сигнал (,,, текущее значение вектора потокосцеп- ленйя в допустимой системе координат согласно выражению (П).
Для определения потокосцепления в опорной системе координат необходимо
.определить начальные условия (f°- H(f и ос уш;ествить поворот допустимой сие- темь координат на заданньш угол. Начальные условия определяются по выражениям (8) и (9), а поворот на заданный угол определяется координатным преобразователем 102 по логическим сигна- лам блока 15 (выход 2).
Как только результирующий вектор совпадает с одной из допустимых осей координат, на выходе логического блока 15 (выход 3) появляется импульс, по которому в блоках 96 и 97 деления производятся вычисления согласно.первым слагаемым выражений (8) и (9), а на i выходе масштабного усилителя 85 появляется сигнал, пропорциональный вто- рым слагаемым этих выражений. Выход- ; ные сигналы делителя 96 и масштабного
.усилителя 85 суммируются в сумматоре
92, а выходные сигналы делителя 97 и масштабного усилителя 85 суммируются в сумматоре 93. На выходе сумматоров
7
18
В блоке 77 (фиг.8) определяется линейное напряжение, а в блока 78 и 79 определяются действительные и мнигг
;мые составляющие напряжения, В диф ференцирующем блоке-80 определяется модуль вектора тока, а затем этот модуль дифференцируется и умножается
на гармонические функции. На выходе
20
5
5
0
5
Q
выходе сумматора 90 появляется сигнал Cf, , определяющий текущее значение
вектора потокосцепления в допустимой системе координат согласно выражению (10). Выход второго интегратора 101 суммируется с выходом масштабного уси-, лителя 87 и на выходе сумматора 91
,9
определяющий
0
5
появляется сигнал (,,, текущее значение вектора потокосцеп- ленйя в допустимой системе координат согласно выражению (П).
Для определения потокосцепления в опорной системе координат необходимо
.определить начальные условия (f°- H(f и ос уш;ествить поворот допустимой сие- темь координат на заданньш угол. Начальные условия определяются по выражениям (8) и (9), а поворот на заданный угол определяется координатным преобразователем 102 по логическим сигна- лам блока 15 (выход 2).
Как только результирующий вектор совпадает с одной из допустимых осей координат, на выходе логического блока 15 (выход 3) появляется импульс, по которому в блоках 96 и 97 деления производятся вычисления согласно.первым слагаемым выражений (8) и (9), а на i выходе масштабного усилителя 85 появляется сигнал, пропорциональный вто- рым слагаемым этих выражений. Выход- ; ные сигналы делителя 96 и масштабного
.усилителя 85 суммируются в сумматоре
92, а выходные сигналы делителя 97 и масштабного усилителя 85 суммируются в сумматоре 93. На выходе сумматоров
19
92 и 93 .появляется сигнал, определяю- i щий начальные условия в допустимой системе координат. Координатный преобразователь 102 по логическим сигна- лам блока 15 (выход 2). осуществляет перевод начальных условий в опорную систему координат (сигналы (и ad На первом Выходе координатного преобт- разователя 102 появляется сигнал Cf 2ci s который поступает на первый вход сумматора 945 «а второй вход которого подается сигнал (. На втором входе координатного преобразователя 102 по1605307
20
10
Ф о рмула, изобретен и я 1. Частотно-регулируемьш электропривод, содержащий асинхронный двигатель, подключенньй к выходам преобразователя частоты, выполненного с инвертором тока и управляемым вьтрями- . телем, датчик частоты вращения, установленный на валу асинхронного двигателя и подключенный выходом к первому входу блока автоматического регулирования частоты и тока, второй и третий входы которого подключены соответственно к выходам задатчика частоты враё:™: :„ГГ: l ,. °.- - - о„ре„еле„„, гладкой
ет на первый вход сумматора 95s на второй вход которого подается сигнал
S dНа выходах сумматоров 94 и 95 появляются сигналы (i и ., определяющие проекции вектора потокосцепления в опорной системе координат а на выходе координатного преобразователя 103 появляются сигналы i и i, опре™ деляющие проекции вектора тока в опорсоставляющей момента, датчик тока установленный в цепи питания инвертора тока и подключенный.выходом к первому входу блока определения проекций гладкой составляющей тока и к четвертому входу блока автоматического pev гулирования частоты и тока, два выхода которого подключены соответствер- но к входам блока задания частоты и блока задания тока преобразователя частоты,- блок определения составлякг- щих потокосцепления, первый вход которого подключен, к выходу датчиков фазных напряжений, датчик фазных тоЗО ков асинхронного двигателя, первая и вторая группы входов блока определения гладкой составляющей момента под- колочены соответственно к выходам блока определения проекций гладкой сое-
д- тавляющей тока и к первой группе выходов блока определения составляющих потокосцепления, отличающий- , с я тем, что, С целью улучшения качества регулирования путем повьшения
40 точности формирования момента в переходных режимах и уменьшения неравномерности вращения на низких частотах, введены блок преобразования фазных токов в линейные токи с тремя выходат
45 MHs блок определения проекций реального тока с тремя входами и двумя выходами, блок определения пульсирующей составляющей .момента с двумя грзшпами входов,, блок вычитания, регулятор мо-
ветствии с пульсациями вращающего мо- 50 мента и блок определения линейньш напряжений, блок определения проекций гладкой составляющей тока снабжен тремя дополнительными входами, блок определения составляющих потокосцеп-
55 Ления снабжен шестью дополнительными
входами и дополнительной группой выхо . дов,, .блок задания частоты Преобразо- вателя частоты снабжен дополнительным выходом, блок автоматического рег-улиной системе координат.
Выходные сигналы (р., и ( блока 12 перемножаются с выходийми сигналами ij и in .блока 9 и па выходе блока 7 появляется сигнал, пропорциональный гладкой составляющей момента М.., а на в ыходе блока-17 появляется пуль сирую-- щий сигнал момента М , на который наложены периодические колебания, ловленные присутствием в сигнале тока высших гармоник. Эти два сигнала срав ниваются друг с другом в вычитателе 18, Отклонение вращающего момента от заданного определяет входной сигнал регулятора 19, выходной сигнал которого поступает на -сумматор 27 (сигнал - 1),.на, второй вход которого поступает заданное значение li TOKaj определяемое по заданно№/ значешво вращаю- щего момента с помощью функционально- го преобразователя 23, На выходе сум-™ матора 27 образуется заданное значе кие тока -1-1 промежуточного контура, которое изменяется во времени в соот мента двигателя, В результате этого ток промежуточного контура, изменяется таким образом, что разпость между ис тинным и заданным значениями вращаго-- щего момента двигателя 3 становится равной нулю, благодаря чему в сравнег НИИ с известным рещением, повышается точность формирования момента и улучшается качество регулирования. .
20
Ф о рмула, изобретен и я 1. Частотно-регулируемьш электропривод, содержащий асинхронный двигатель, подключенньй к выходам преобразователя частоты, выполненного с инвертором тока и управляемым вьтрями- . телем, датчик частоты вращения, установленный на валу асинхронного двигателя и подключенный выходом к первому входу блока автоматического регулирования частоты и тока, второй и третий входы которого подключены соответственно к выходам задатчика частоты - - о„ре„еле„„, гладкой
рования частоты и тока снабжен дополнительным входом, подключенным к выходу регулятора момента, при этом выходы датчика фазных токов подключены к входу блока преобразований фазных токов в линейные токи и к первому входу блока определения составляющих, реального тока, первый выход блока преобразований фазных токов в линейные подключен к второму входу блока определения проекций реального тока, второй выход указанного блока преобразования подключен к второму входу блока определения проекций гладкой составляющей тока, к третьему входу блока определения проекций реального тока и к второму входу блока определения составляющих потокосцепления, третий выход преобразователя фазных токов в линейные токи подключен к объединенным между собой третьим входами блока определения проекций гладкой составляющей тока и блока определения .составляющих потокосцепления, четвертый и пятьм входы которого подключены к соответствующим выходам блока определения проекций реального тока, шестой вход- блока определения составляющих потокосцепления подключен к выходу блока определения линейных напряжений, соединенного с въкодом датчика фазных напряжений, седьмой вход блока определения составляющих потокосцепления объединен с четвертым входом блока определения гладкой составляющей тока и подк1дачен к дополнительному выходу блока задания частоты преобразователя .частоты, обе группы выходов блока определения составляющих потокосцепления подключены к входам блока определения пульсирующей составляющей момента, выход которого и выход блока определения гладкой составляющей момента подключены к входам блока вычитания, соединенного с входом регулятора момента.
2, Электропривод по п,1, о т л и - чающийся тем, что блок определения проекций гладкой составляющей тока снабжен тремя элементами И, блоком управления,- двумя элементами ИЛИ, коммутатором, генератором, блоком ключей, счетчиком, блоком делителей на два,.генератором функций Уолша для синтеза косинусоидальных функций, ге1
гг
60530722
нера;тором функций Уолша для синтеза синусоидальных функций, двумя блоками задания весовых коэффициентов и двумя сумматорами, причем четвертый вход блока определения проекций гладкой составляющей тока образован первым входом первого элемента И, первым входом коммутатора и первым входом бло10 ка управления, первый и третий выходы которого соединены с входами первого элемента ИЛИ, выход которого соединен с первым входом второго элемента И и с управляющим входом коммутатора, вто15 рой вход которого соединен с выходом генератора и с вторым входом второго элемента И, а выход коммутатора соединен с неуправляющим входом блока ключей, единичный управляющий вход
20 которого соединен с третьим выходом блока управления, а управляющие входы блока ключей образуют второй вход блока определения проекций гладкой сое-- тавляющей тока, третий вход которого
25 образован вторым входом блока управления, а выходы блока ключей соединены с входами счетчика, выход которого
35
40
соединен с третьим входом второго элемента И, с третьим входом блока уп30 равления и первым входом третьего
элемента И, второй вход которого соединен с вторым выходом блока управле-; ния, а выход третьего элемента И соединен с вторым входом первого элемента И, выход которого соединен с пёрвым вхо- дом второго элемента ИЛИ, второй вход которого соединен с выходом второго элемента И, а выход второго элемента 1 ШИ - с входом блока делителей на два, выходы которого соединены с входами генераторов функций Уолша для синтеза косинусоидальных и синусоидальных функций, выходы генератора функций Уолша для синтеза косинусоидальных
45 функций через первьш блок задания весовых коэффициентов соединены с входами первого сумматора, выходы генератора функций Уолша для синтеза синусоидальных функций через второй блок задания весовых коэффициентов соединены с входами второго сумматора, другие входы первого и второго блоков задания весовых коэффициентов образуют первый вход блока определения проекций гладкой составляющей тока.
50
«o «§
CSJ
fti
Nj Cvj
Выход2
.З
fl.
s .
Oi
/Г
О
5{7 120 180 2 f320V60 m m
II
jrni
r
Lr-)
Ч
Om6j).S
nf
QmSa.15
63 J
OmGAfS
TJ
-С
/
/
/
/
/
в
в
Фиг. 9
W 
| ВОДОСЧЁТЧИК - МОКРОХОД | 2002 |
|
RU2234681C2 |
| Авторское свидетельство СССР , кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
