Изобретение относится к автоматизации транспортных средств при испытаниях на автополигонах.
Известно устройство для автоматического управления движением подвижных объектов, содержащее задатчик курса, расположенный в полотне дороги, задатчики положения транспортного средства, устройство сравнения, усилитель мощности и исполнительный механизм, связанный с управляющим органом .
Недостатком известного устройства является инерционность системы и большая чувствительность к тряске, что приводит к отклонению от курса транспортного средства при больших скоростях.
Наиболее близким к предлагаемому по технической сущности является устройство, содержащее задатчик курса и последовательно соединенные датчик положения средства, блок сравнения, сумматор, усилитель мощности.
исполнительный механизм, а также датл чик обратной связи управляющего органа, соединенный с одним из входов сумматора 2 .
Недостаток данного устройства состоит в чувствительности системы при вертикальном перемещении транспортного средства, находящегося на заданном курсе, что приводит к ложному срабатыванию системы управления и,
10 следовательно, к ее низкой надежности.
Цель изобретения - упрощение и повышение надежности управления транспортным средством.
15
Указанная цель достигается тем, что блок сравнения и сумматор выполнены в виде моста постоянного тока, а между датчиками положения и мостом включены транзисторы, базы которых
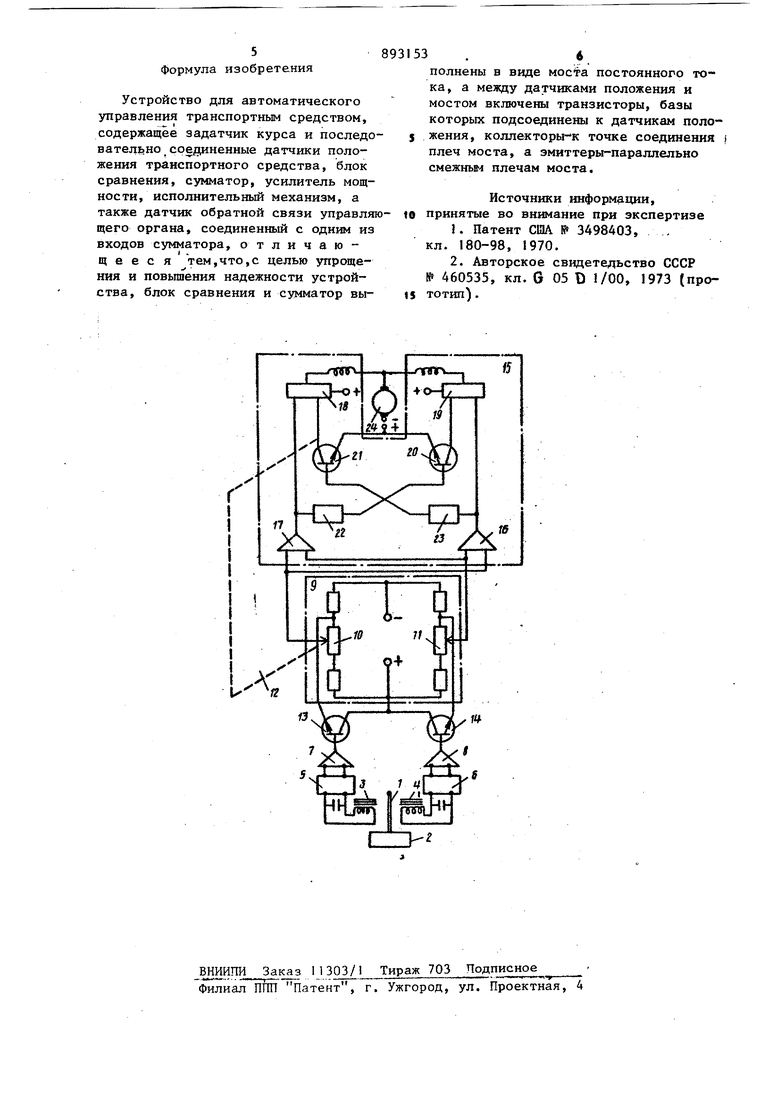
20 подсоединены к датчикам положения, коллекторы - к точке соединения плеч моста, а эмиттеры - параллельно смежным плечам моста. 3 Такое выполнение устройства сравнения позволяет сделать систему нечувствительной к вертикальным переме щениям транспортного средства, находящегося на заданном курсе. На чертеже изображена схема устро ства для автоматического управления транспортным средством. Устройство содержит задатчик 1 курса, состоящий из направляющего кабеля,уложенного в полотне дороги, задатчик 1 соединен с генератором 2, датчики 3 и 4 положения транспортного средства относительно задатчика, расположенные на транспортном средет не по обе стороны направляющего кабе ля. Выходы датчиков.3 и 4 через выпрямители 5 и 6 и усилители 7 и 8 связаны со входами блока 9 сравнения в виде моста постоянного тока, резис торы 10 и 11 которого выполнены пере менными и представляют собой сумматор сигнала датчиков 3 и 4 положения и датчика I2 обратной связи управляю щего органа, между мостом и датчиками 3 и 4 включены транзисторы 13 и 14 параллельно плечам моста. Сигнал с сумматора поступает на усилитель 15 мощности, входы которого выполнены в виде входов операцион ных усилителей 16 и 17, выходы которых соединены с усилителями I8 и 19 тока, которые могут быть выполнены и в виде одного реверсивного усилителя Причем в опорные входы усилителей 18 и 19 тока через транзисторы 20 и 21 и RC-цепочки 22 и 23 соединены с выходами операционных усилителей 16 и 17 соответственно. Выходы усилителей 18 и 19 тока являются выходами усилителя 15 мощности и подключены ко входу исполнительного механизма 24. К выходу исполнительного механизма подключен датчик 12 положения управляющего органа (не показан), вы ходом механически связанный с положением подвижного контакта переменно го резистора 10. Устройство работает следующим образом. В кабель задатчика 1 от генератора 2 поступает ток определенной част ты. Вокруг кабеля задатчика 1 возникает электромагнитное поле, в котором находятся датчики 3 и 4. В датчиках 3 и 4 наводятся электри еские колебания, величина которых 34 зависит от расстояния между датчиками 3 и 4 и кабелем. При симметричном расположении датчиков 3 и 4 относительно кабеля задатчика в них возникают одинаковые по величине сигналы, которые выпрямляются вьтрямителями 5 и 6, усиливаются усилителями 7 и 8 и через транзисторы I3 и 14 шунтируют сопротивление плеч моста на одинаковзт) величину, и мост остается сбалансированньм. При смещенйи Продольной оси автомобиля относительно задатчика 1, датчики 3 и 4 также смещаются относительно задатчика , следовательно величина сигнала в одном датчике увеличивается, а в другом уменьшается. После усиления сигналов с датчиков 3 и 4 усилителями 7 и 8 транзисторы 13 и 14 по-разному шунтируют сопротивления плеч моста, в результате чего мост разбалансируется. Напряжение разбаланса, снимаемое с резисторов 10 и И в зависимости от полярности, усиливается операционным усилителем 16 или 17, а затем через усилитель 18 или 19 тока поступает на вход исполнительного механизма 24, который в зависимости от поступающего сигнала производит правый или левый поворот управляющего органа. Исполнительный механизм 24 механически связан с датчиком 12 обратной связи, который задает углы поворота колесам через зшравляющий орган в зависимости от степени смещения оси автомобиля относительно кабеля задатчика 1. Для устранения автоколебаний исполнительного механизма 24 в усилителе 15 мощности применены RC-цепочки 22 и 23, которые через транзисторы 21 и 20 производят электродинамическое торможение исполнительного механизма 24. При вертикальных смещениях транспортного средства относительно кабеля задатчика 1, т.е. при изменении уровня входного сигнала с датчиков 3 и 4, сигнал разности устройства сравнения остается постоянным за. счет того, что коэффициент передачи моста постоянного тока изменяется в зависимости от уровня входного сигнала на базах транзисторов 13 и 14. Устройство позволяет с требуемой точностью направлять автомобиль по испытательной трассе при любых скоростях.
формула изобретения
Устройство для автоматического управления транспортным средством, содержащее задатчик курса и последоватедйнс соединенные датчики положения транспортного средства, блок сравнения, сумматор, усилитель мощности, исполнительный механизм, а также датчик обратной связи управляющего органа, соединенный с одним из входов сумматора, отличающееся тем,что,с целью упрощения и повьппения надежности устройства, блок сравнения и сумматор вы893153
полнены в виде моста постоянного тока, а между датчиками положения и мостом включены транзисторы, базы которых подсоединены к датчикам положения, коллекторьг-к точке соединения f плеч моста, а эмиттеры-параллельно смежньм плечам моста.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 3498403, . кл. 180-98, 1970.
2.Авторское свидетельство СССР
№ 460535, кл. G 05 D 1/00, 1973 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления подвижным объектом | 1986 |
|
SU1411713A1 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| Устройство для защиты от избыточного скольжения колесных пар транспортного средства | 1984 |
|
SU1316860A2 |
| Рулевое управление с изменяемым передаточным числом | 1983 |
|
SU1100179A1 |
| Способ определения координат мостового крана | 2021 |
|
RU2767796C1 |
| Устройство для аварийной остановки привода с самоконтролем линии связи | 1987 |
|
SU1471173A1 |
| Авторулевой | 1973 |
|
SU460535A1 |
| Регулятор | 1987 |
|
SU1472884A1 |
| УСТРОЙСТВО ДЛЯ УВЧ-ТЕРАПИИ | 1992 |
|
RU2019206C1 |
| ТЕРМОСТАТ ДЛЯ КАЛИБРОВКИ И ПРОВЕРКИ ОКЕАНОГРАФИЧЕСКИХ ПРИБОРОВ | 2012 |
|
RU2506624C2 |
Г
f7
v
Ix 12
JS
