vj
ш-ь
со
Изобретение относится к автоматике, в частности к .автоматическим системам управления подвижным объ- ектом, имеющим задатчик курса и датчик положения.
Цель изобретения - повьдиение производительности устройства за счет обеспечения регулировки скорости |объекта в зависимости от профиля трассы, т.е. увеличение средней ско- |рости перемещения объекта, а также Iповышение надежности управления скоростью перемещения.
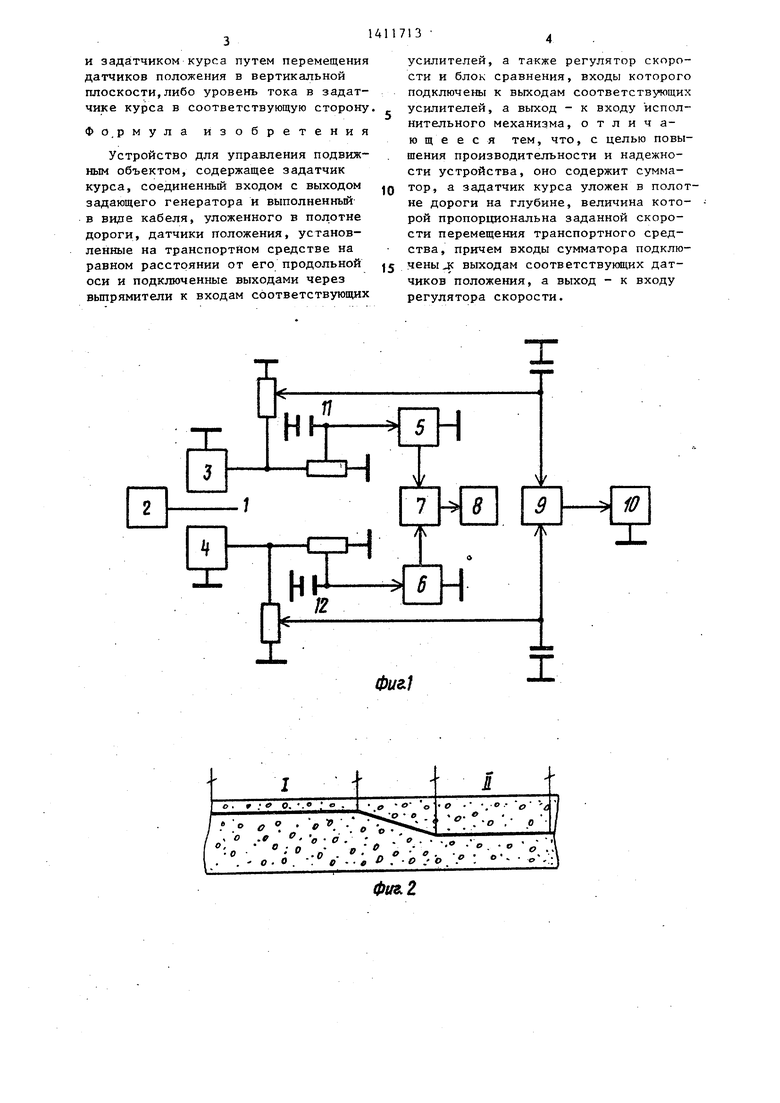
На фиг. 1 представлена схема устройства i на фиг. 2 - схема укладки кабеля в полотно дороги.
Задатчик 1 курса (кабель) уложен в полотно дороги, кабель имеет связь с задающим генератором 2. Устройство содержит также датчики 3 и 4 положения, усилители 5 и б мощности, блок 7 сравнения, исполнительный механизм 8, сумматор 9, регулятор 10 скорости, вьтрямители (не показаны) и фильтры 11 и 12.
В системе может быть применен датчик обратной связи (не показан), обеспечивающий связь выхода исполнительного механизма с элементом, регулирующим входное напряжение усилителей мощности. При пропорциональном управлении датчик обратной связи может быть исключен.
Устройство работает следующим образом.
Датчики 3 и 4 положения размещены на подвижном объекте, который устанавливается так, чтобы эти датчики были р.асположены симметрично относительно задатчикд 1 курса. Генера- тор 2 создает в задйтчике курса токи определенной частоты, которые, в свою очередь, создают вокруг задат- ,чика курса электромагнитное поле. Это поле наводит в датчиках 3 и 4 положения ЭДС, При условии, что объ ект перемещается параллельно задат- чику курса, в датчиках положения наводятся равные ЭДС, тогда и на выходах этих датчиков сигналы равны. Исполнительньй механизм 8, определяющий направление движения объекта, находится в нулевом положении так как сигналы на выходах усилител 5 и 6 мощности равны. Сигналы на вхдах сумматора 9, суммируясь, поступают на выход сумматора и на вход регулятора 10 скорости, определяемы
уровнем выходного сигнала сумматора, который в свою очередь, определяется амплитудой выходных сигналов датчи- ков положения.
На участках I и II кабель лежит на разной глубине от поверхности полотна дороги. На участке I сигнал на
0 выходах датчиков положения больше при условии работы датчиков в линейном режиме, а.на участке II - меньше. Значит, и сумма этик сигналов на выходе сумматора 9 соответствует уров5 ням выходных сигналов, а регулятор скорости реагирует на изменение этого суммарного сигнала, т.е. изменяет скорость в меньшую или в большую сторону. Если в силу смещения подвижного
0 объекта сигналы с датчиков положения изменяются, а изменяются они пропорционально смещению, но противоположно по знаку, на выходе сумматора сигнал постоянный, поэтому скорость объекта
5 остается та же, что и была.
На усилители мощности поступают сигналы, разные по уровню, что приводит к изменению их выходных сигналов. Исполнительньш механизм начинает раз0 ворот объекта, датчик обратной связи вьщает сигнал, пропорциональньш величине разворота и равный по крутизне сигналу на выходе усилителей мощ- . ности, но с противоположным знаком, что ограничит угол разворота объекта, с последующей отработкой асимметрии датчиков положения. Причем уровень сигналов с датчиков положения, изменяющийся симметрично, не влияет на
Q функционирование исполнительного механизма, т.е. объект не разворачивается при симметричном изменении уровней сигналов с датчиков положения .
5 Таким образом,разворот объекта не влияет на скорость перемещения объекта, как и изменение скорости не влияет на положение объекта относительно задатчика курса.
Q Изобретение характеризуется тем, что скорость объекта определяется самой трассой, где находится объект в данный момент, а время изменения скорости - длиной переходного участ5 ка от I к II. Если необходимо отно-. сительно изменить скорость передвижения объекта, то меняют уровень выходных сигналов с датчиков либо расстояние, между датчиками положения
5
и задатчиком курса путем перемещения датчиков положения в вертикальной плоскости,либо уровень тока в задат- чике курса в соответствующую сторону
Ф о,р мула изобретения
Устройство для управления подвижным объектом, содержащее задатчик курса, соединенный входом с выходом задающего генератора и выполненный- в виде кабеля, уложенного в полотне дороги, датчики положения, установленные на транспортном средстве на равном расстоянии от его продольной оси и подключенные выходами через вьшрямители к входам соответствующих
усилителей, а также регулятор скорости и блок сравнения, входы которого подключены к выходам соответствующих усилителей, а выход - к входу исполнительного механизма, отличающееся тем, что, с целью повышения производительности и надежности устройства, оно содержит сумматор, а задатчик курса уложен в полотне дороги на глубине, величина которой пропорциональна заданной скорости перемещения транспортного средства, причем входы сумматора подключены jc выходам соответствующих датчиков положения, а выход - к входу регулятора скорости.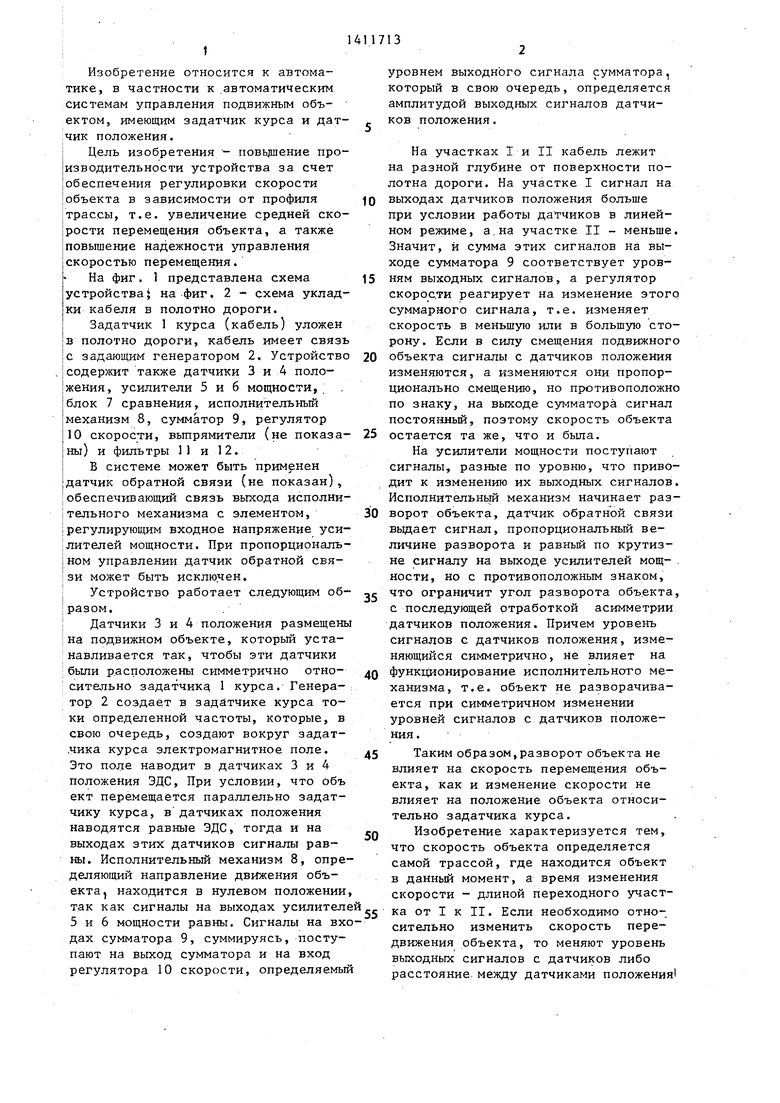
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления транспортным средством | 1977 |
|
SU893153A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 1989 |
|
RU2015524C1 |
| Устройство для прокладки трасс с заданным уклоном к горизонту | 1985 |
|
SU1349709A1 |
| Система управления автоматическим транспортным модулем | 1988 |
|
SU1558317A1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Система автоматического регули-РОВАНия уРОВНя МЕТАллА B КРиСТАлли-зАТОРЕ | 1979 |
|
SU839669A1 |
| Устройство для регулирования температуры воздуха в теплице | 1990 |
|
SU1720568A1 |
| Система автоматического сопровождения телескопа | 1989 |
|
SU1725181A1 |
| Устройство для управления движением сочлененных транспортных тележек | 1991 |
|
SU1823824A3 |
| Регулятор мощности дуговой многофазной электропечи | 1988 |
|
SU1522433A1 |
Изобретение относится к области автоматики, в частности к автоматическим системам управления подвижным объектом. Изобретение позволяет обеспечить регулировку скорости объекта в зависимости от профиля трассы,т.е. увеличить среднюю скорость перемещения объекта, повысить надежность управления скоростью перемещения В устройство введен сумматор, а за- датчик курса уложен на глубине, величина которой пропорциональна скорости перемещения объекта. 2 ил.
| Патент США № 3498403, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для автоматического управления транспортным средством | 1977 |
|
SU893153A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
