(З) УСТРОЙСТВО для СТАТИЧЕСКОЙ БАЛАНСИРОВКИ
I
Изобретение относится к балансировочной технике и может быть использовано для статической балансировки роторов разнообразных машин.
Известно устройство для статической балансировки роторов, содержащее основание и прикрепленные к нему горизонтально две параллельные направляющие для Шеек ротора lJ.
Недостатком устройства является то, что оно малопроизводительно в работе, так как при каждом этапе процесса балансировки требуется перестановка ротора в необходимое положение и фиксация состояния безразличного равновесия.
Наиболее близким по технической сущности к предлагаемому я,вляется устройство для статической балансировки роторов, содержащее стойку и соединенные с ней опорные элементы для шеек ротора, выполненные в виде роликов на подшипниках качен .Я 2 J. РОТОРОВ
Недостатком устройства является то, что точность балансировки изделий невысока, так как требует точно- го выполнения деталей устройства.
Цель изобретения - повышение точности балансировки.
Поставленная цель достигается тем, что опорные элементы выполнены в виде двух гибких лент, параллельно
10 закрепленных каждая своими концами с помощью кронштейнов на стойке так, что расстояние между кронштейнами меньше длины ленты.
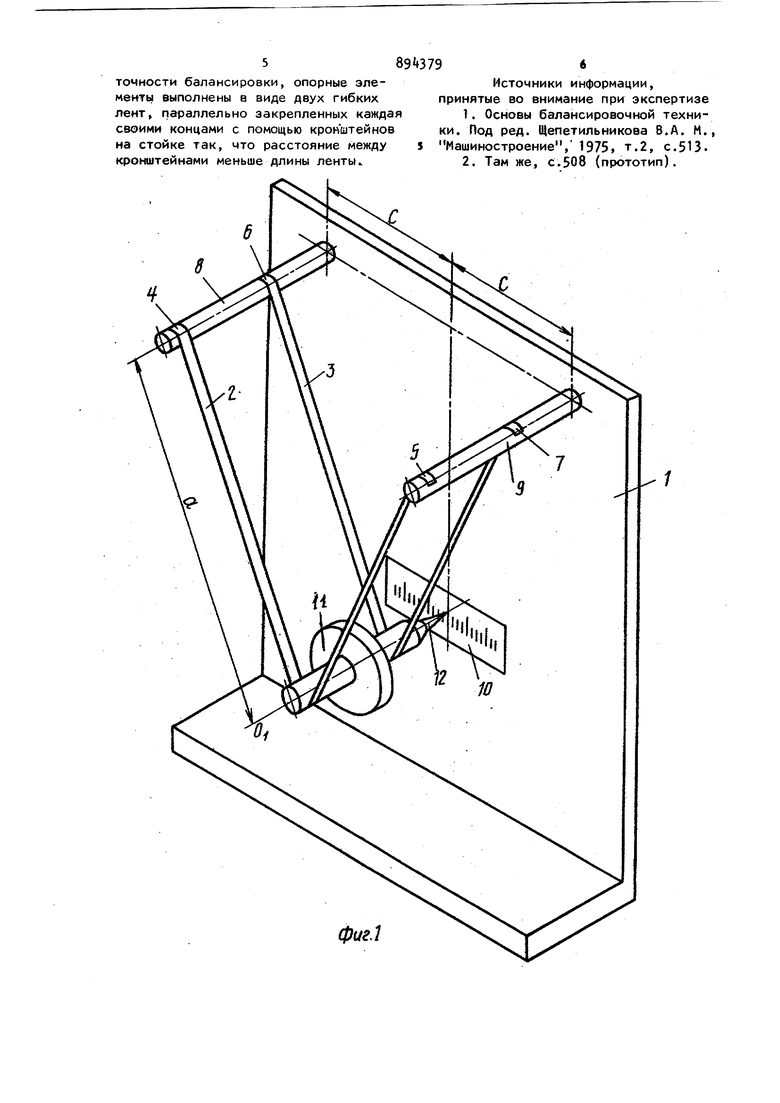
На фиг.1 представлено устройство,
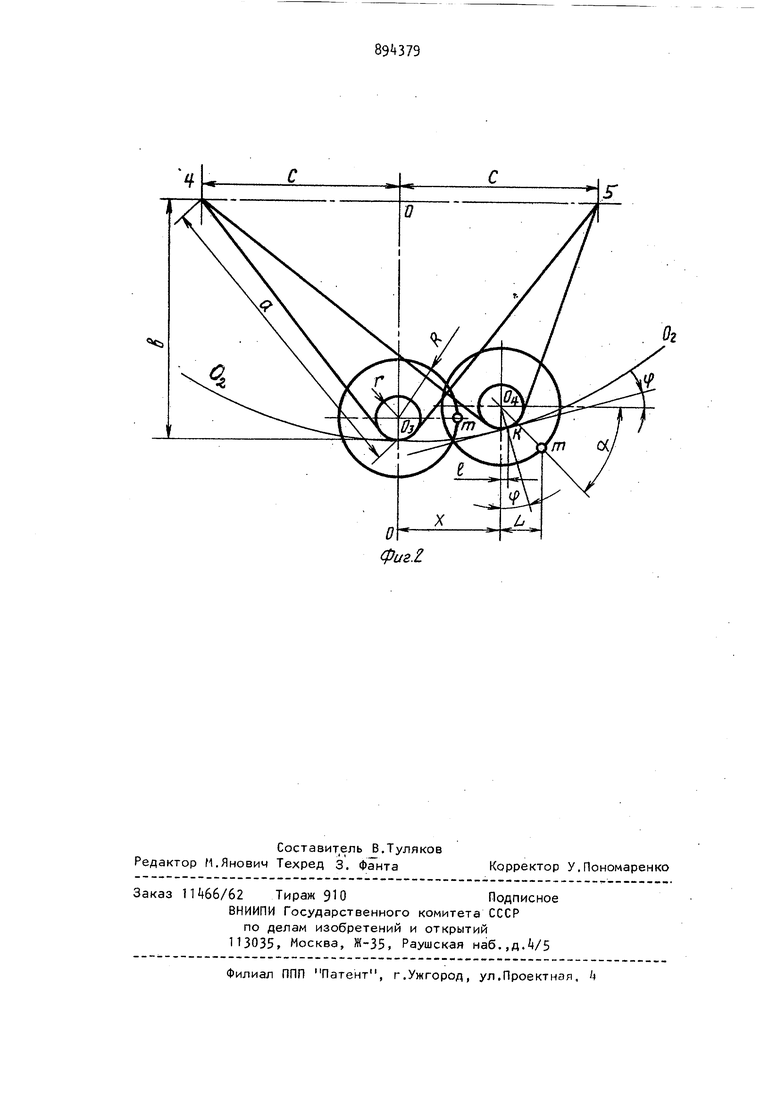
15 пространственное изображение; на фиг.2 - то же, расчетная схема.
Устройство содержит стойку 1, опорные элементы, выполненные в виде двух гибких лент 2 и 3, параллельно
20 закрепленных своими концами Ц-7 с . помощью кронштейнов 8 и 9 на стойке 1 так, что расстояние 2с между кронштейнами меньше длины 2а ленты, а также шкалу 10, зак репленную на стойке, На фиг, 1 представлен также балансируемый ротор 11 с указателем 12 шкалы 10. Работа устройства заключается в следующем. Ротор 11 укладывается на гибкие ленты 2 и 3 так, чтобы его геометрическая ось 0 совпадала бы с геометрической осью устройства, лежащей в вертикальной плоскости 0-0. П-ри этом ротор начинает поворачиваться, перекатываясь по лентам 2 и 3 в таком направлении, при котором его неуравновешенная масса m опускается вниз. При перекатывании ротора 11 в лентах 2 и 3, закрепленных в точках , 5 и 6,7, ось вращения ротора пере мещается по эллиптической траектории . Такое перекатывание можно счи тать эквизалентным перекатыванию ротора 11 по наклонной прямой с переменным углом наклона (j , равным углу наклона касательной к эллипсу в соот ветствующей точке. После окончания поворота ротор 11 останавливается в равновесном положении,, которое с дос таточной точностью описывается уравнением, где М - biacca ротора; - плечо момента веса ротора; L - плечо момента неуравновешенной массы. Если в повернутом положении ротор переместить так, чтобы его ось 0. сн ва оказалась симметричной оси устрой ства и уложить его на ленты 2 и 3 то он вновь будет перекатываться до достижения нового равновесного положения. Повторяя эту операцию несколь ко раз, достигают наинизшего положения неуравновешенной массы m и определяют, тем самым, угол дисбаланса. С целью определения величины момента неуравновешенности ротор f1 ук ладывают на ленты 2 и 3 так, что его геометрическая ось 0 находится в плоскости симметрии устройства, а не уравновешенная масса m - в горизонтальной плоскости симметрии ротора. Из этого положения ротор 11 перекатывается по лентам 2 и 3 и его ось из точки 0 перемещается в точку 0. Неуравновешенная масса т, перемещаясь при перекатывании ротора, поворачивает вокруг его оси на угол о , 94 после чего наступает равновесие,описываемое уравнением (1). При повороте ротора на угол oL и перекатывании без проскальзывания его ось 0/( перемещается в горизонтальном направлении на величину х, вычисляемую по уравнению с ок где toK. длина дуги окружности, ограниченной углом об. Величина ок вычисляется согласно следующему уравнению 27rrj| - 0,.«f. Если принять угол - угол наклона касательной к эллипсу в точке К касания окружности ротора эллиптической траектории его перемещения при перекатывании, то можно выписать следующие несколько вспомогательных уравнений d 6ror755roiL Rcosct; rsini/; . in bx s,. с учетом вспомогательных уравнений получается выражение момента неуравновешенностиQ, гйе Ь - величина провисания лент 2 и 3. Регистрируя по шкале 10 отклонение оси ротора 11 при перекатывании, пределяют момент неуравновешенности балансируемого ротора 11. При балансировке одинаковых роторов измерение отклонения выполняется ибо в величинах момента, либо в веичинах неуравновешенной на заданном радиусе массы по специально-отградуированным шкалам. Наличие измерительного элементакалы в сочетании с принятой методикой замеров на устройстве позволяет однять точность балансировки. Формула изобретения Устройство для статической балансировки роторов, содержащее стойку и соединенные с ней опорные элементы ля шеек ротора, отличающеся тем, что, с целью повышения
точности балансировки, опорные элементы выполнены а виде двух гибких лент, параллельно закрепленных каждая своими концами с помощью кронштейнов на стойке так, что расстояние между кронштейнами меньше длины ленты
Источники информации, принятые во внимание при экспертизе
1.Основы балансировочной техники. Под ред. Щепетильникова В.А. М., Машиностроение, 1975, т.2, с.513.
2.Там же, с.508 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для балансировки ротора | 2022 |
|
RU2795641C1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 2009 |
|
RU2441211C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2460052C1 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| Устройство для балансировки роторов | 1983 |
|
SU1132156A2 |
| СПОСОБ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ РАБОЧЕГО КОЛЕСА ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ | 2011 |
|
RU2456566C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |