Изобретение относится к области динамической балансировки путем приведения во вращение испытуемых объектов с приложением внешних сил, компенсирующих силы, вызванные дисбалансом.
Известен способ для балансировки по а. с. 949366, G 01 M 1/38, содержащий установленную балансировочную емкость в одной из плоскостей коррекции ротора. В радиальном направлении пропускают жидкость из емкости со стороны, противоположной смещению оси вращения ротора от его геометрической оси.
При реализации такого способа не решается задача балансировки в другой плоскости коррекции, так как не учитывается направление вектора дисбаланса в другой плоскости коррекции. Способ имеет ограниченное техническое применение в связи с тем, что после компенсации дисбаланса в одной плоскости появится дисбаланс в другой плоскости. Способ применим к плоским роторам.
Известен способ балансировки по а. с. 958887, G 01 M 1/12, в котором для исключения взаимного влияния плоскостей коррекции изделие устанавливают на оправку вертикально с зазором, и образующийся за счет отклонения центра масс от оси вращения зазор устраняют статической балансировкой, тем самым решая задачу балансировки без учета взаимного влияния плоскостей коррекции.
Такой способ имеет ограниченное применение и не может быть использован в тех случаях, когда нет возможности устанавливать балансируемый ротор вертикально, кроме того, статическая балансировка дает более низкие результаты по точности балансировки.
Известен способ разделения плоскостей коррекции роторов по а. с. 691707, G 01 M 1/22, заключающийся в том, что устанавливают балансируемый ротор неподвижно в опоры, определяют масштабные коэффициенты влияния плоскостей коррекции, поочередно нагружают каждую из плоскостей коррекции фиксированной силой и определяют коэффициенты влияния как отношение реакций опор на указанную силу.
Недостатком способа является необходимость определения коэффициентов влияния плоскостей коррекции одной на другую и, как следствие, изменение этих коэффициентов в процессе устранения дисбаланса фиксированной силой, например путем нанесения массы, что требует повторного определения коэффициентов влияния и т.д. - неоднократно. То есть способ реализует действия по разделению плоскостей коррекции, но не устраняет само влияние плоскостей коррекции одной на другую.
Наиболее близким прототипом является способ балансировки роторов по а. с. 571723, G 01 M 1/14, заключающийся в том, что установленный в опорах ротор разгоняют до частоты балансировки, замеряют величины и углы начальных дисбалансов в двух плоскостях коррекции, затем по линиям действия начальных дисбалансов в указанных плоскостях производят коррекцию величин дисбаланса до получения допустимых значений остаточных дисбалансов, причем в одной из плоскостей производят коррекцию массой, величину и ее угловое положение относительно начального дисбаланса выбирают при минимальной реакции опор, при одинаковом для двухконсольных роторов или противоположном для двух опорных роторов направлениях остаточного дисбаланса.
Опорные реакции при балансировке снижаются за счет динамических усилий, имеющих разное направление, путем вычитания их модулей из реакций опор.
Опорные реакции снижаются путем компенсации составляющих главного момента инерции, которые имеют главную центральную ось инерции, не совпадающую с осью вращения ротора, при условии вычитания их модулей из реакций опор, то есть за счет воздействия на составляющие главного момента дисбалансов ДН ротора, создаваемого на плече L, равного расстоянию между опорами, парой кососимметричных дисбалансов ДМА и ДМВ.
Недостатком такого способа балансировки является взаимное влияние одной составляющей кососимметричного дисбаланса на другую в процессе коррекции величины дисбалансов, которое происходит из-за смещения места перекрещивания оси вращения ротора и главной центральной оси инерции ротора.
В этом случае изменение величины дисбаланса нанесением массы в одной плоскости коррекции, после того как в результате балансировки уже получены допустимые, то есть минимальные величины остаточных дисбалансов, приведет к изменению и величины, и угла дисбаланса в другой плоскости.
Технической задачей предлагаемого способа является повышение точности балансировки, упрощение балансировочных станков и процесса балансировки за счет исключения действий, обусловленных изменением величины дисбаланса в одной плоскости коррекции после приложения внешней силы, в частности нагружением массой, в другой плоскости коррекции.
Решение такой задачи возможно при условии получения минимального дисбаланса не только в плоскостях измерения реакции опор, но и в плоскостях коррекции дисбалансов. Это возможно в случае, когда при балансировке ось вращения ротора и геометрическая ось ротора будут совмещены, то есть главный момент дисбалансов будет равен нулю, а главный вектор дисбалансов будет иметь минимальное значение.
Поставленная задача решается следующим образом.
Балансируемый ротор устанавливают в опорах, приводят ротор во вращение, определяют составляющие главного вектора дисбаланса в каждой плоскости коррекции, уменьшают их величину нагружением массой и изменяют дисбаланс в одной плоскости коррекции до получения равенства векторов дисбаланса в плоскостях коррекции, затем одновременно нагружают ротор в каждой плоскости коррекции массами до устранения дисбаланса.
Отличительным признаком в заявленном техническом решении является то, что изменяют дисбаланс в одной плоскости коррекции, в частности нагружением массой, подбирая ее расположение таким образом, чтобы угол между векторами дисбаланса в плоскостях коррекции уменьшался, при этом изменяют величину массы до получения равенства векторов дисбаланса в плоскостях коррекции. Это позволяет привести систему "геометрическая ось - ось моментов инерции вращения ротора" к режиму, аналогичному статическому дисбалансу, когда ось вращения и геометрическая ось параллельны и при вращении ротора на опоры действуют одинаковые силы.
После этого одновременно нагружают ротор в каждой плоскости коррекции массами до устранения дисбаланса.
При такой последовательности действий исключена необходимость компенсации взаимного влияния дисбаланса в плоскостях коррекции, что позволяет упростить конструкцию балансировочного станка и сократить процесс балансировки.
Из изученной патентной и научно-технической литературы авторам неизвестно техническое решение с перечисленной совокупностью признаков, что дало основание сделать вывод о его соответствии критериям изобретения.
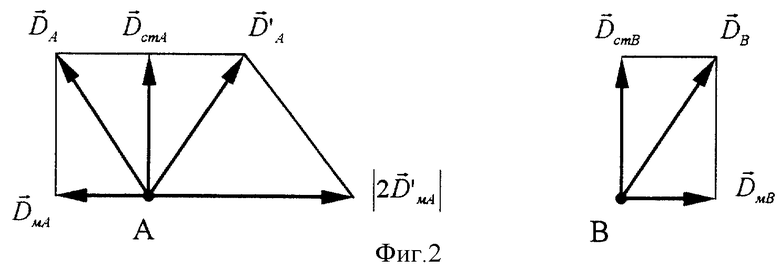
На фиг. 1 представлена схема векторов дисбалансов, воздействующих на ротор, вращающийся в опорах А и В, где приняты следующие обозначения:
О.р. - ось ротора,
Гл.ц.о.и. - главная центральная ось инерции ротора,
ц.м. - центр масс,
Dст - главный вектор дисбалансов ротора,
DстА и DстB - составляющие вектора Dст в плоскости опор,
DМA и DМB - пара дисбалансов, возникающих на плече LB и LA,
DM - главный момент дисбалансов, создаваемый парой дисбалансов DМА и DМВ на плече L,
ест - удельный дисбаланс,
DA=DстА+DMA;
DB=DстB+DMB.
Из фиг. 1 видно, что дисбаланс неуравновешенного ротора складывается из динамической неуравновешенности - вектор DM и статической неуравновешенности - вектор Dст.
Статический дисбаланс имеет место, когда главная центральная ось инерции ротора параллельна оси ротора. В соответствии с предложенным способом для реализации такого условия необходимо приложить в одной плоскости, например в точке А, силу, удвоенную по величине и противоположно направленную вектору динамической неуравновешенности DMA.
На фиг. 2 представлены векторные диаграммы для двух плоскостей коррекции, в данном случае совпадающих с плоскостями опор ротора А и В. Из фиг. 2 видно, что векторы DA и DB после приложения силы, эквивалентной вектора 2DMA, стали равны, то есть система приведена к статическому дисбалансу.
Способ реализуется следующим образом. Балансируемый ротор устанавливают в двух опорах, имеющих датчики, воспринимающие перемещения опор под действием дисбаланса ротора. Для определения параметров дисбаланса приводят ротор во вращение и определяют амплитуды сигналов с датчиков. Нанесением известной массы, сигналы масштабируют пропорционально величине дисбаланса в каждой плоскости одновременно с помощью датчика, фиксирующего угол поворота синхронно с вращением балансируемого ротора, при достижении максимума амплитуды определяют фазовую составляющую вектора дисбаланса в каждой плоскости коррекции.
После определения составляющих векторов дисбаланса по амплитуде и фазе (углу) нагружением массой на угол, отличающийся от измеренного на 180o, то есть в противофазе, произвольно уменьшают амплитудную составляющую векторов дисбаланса.
Затем увеличивают число оборотов до установленных требованиями на балансируемый ротор и нагружают его массой в одной плоскости коррекции, при этом выбирают угол для нанесения массы таким образом, чтобы угол вектора дисбаланса в этой плоскости коррекции изменил свое направление в сторону выравнивания по величине угла с вектором дисбаланса в другой плоскости коррекции. Место нанесения корректирующей массы подбирают до получения равенства углов векторов дисбаланса. При этом изменяют и величину корректирующей массы, чтобы в плоскостях коррекции сравнялись и амплитуды векторов дисбаланса.
Затем одновременно в каждой плоскости коррекции нагружают балансируемый ротор массами до устранения дисбаланса.
Предложенный способ проверен на изготовленном балансировочном стенде для балансировки карданных валов и может быть реализован на других балансировочных станках.
Использование заявленного изобретения позволяет упростить процесс балансировки роторов, исключает необходимость создания и использования специальных методов и устройств, устраняющих при балансировке роторов взаимное влияние плоскостей коррекции, что упрощает конструкцию балансировочных станков, снижает затраты на изготовление станков и на выполнение балансировочных операций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2002 |
|
RU2225602C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| СТАНОК ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2010 |
|
RU2455624C2 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2007 |
|
RU2353910C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА | 2004 |
|
RU2292534C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЙ | 2008 |
|
RU2425345C2 |
| УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2007 |
|
RU2336509C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
Способ предназначен для балансировки роторов, карданных валов. Ротор устанавливают в опорах и приводят во вращение. Определяют составляющие главного вектора дисбаланса в каждой плоскости коррекции. Уменьшают величину дисбаланса нагружением массой. Изменяют дисбаланс в одной плоскости коррекции до получения равенства векторов дисбаланса в плоскостях коррекции. Затем одновременно нагружают ротор в каждой плоскости коррекции массами до устранения дисбаланса. Обеспечивается повышение точности балансировки и упрощение процесса балансировки. 2 ил.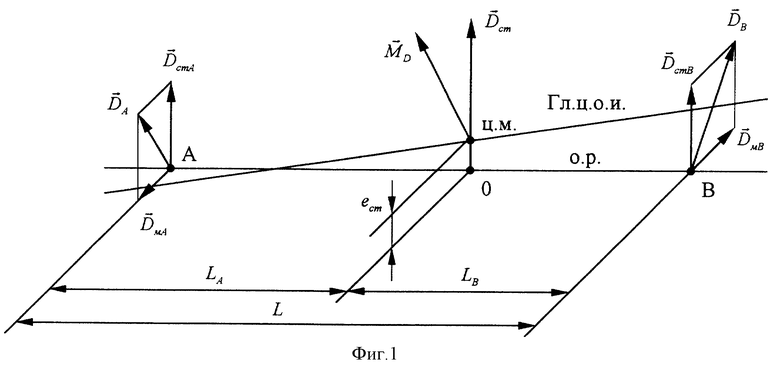
Способ динамической балансировки, заключающийся в том, что балансируемый ротор устанавливают в опорах, приводят во вращение, определяют составляющие главного вектора дисбаланса в каждой плоскости коррекции, уменьшают их величину нагружением массой и изменяют дисбаланс в одной плоскости коррекции до получения равенства векторов дисбаланса в плоскостях коррекции, затем одновременно нагружают ротор в каждой плоскости коррекции массами до устранения дисбаланса.
| Способ балансировки роторов | 1976 |
|
SU571723A1 |
| Способ динамической балансировки роторов | 1973 |
|
SU540183A1 |
| RU 2059214 Сl, 27.04.1996 | |||
| DE 4019721 Al, 10.01.1991. | |||

