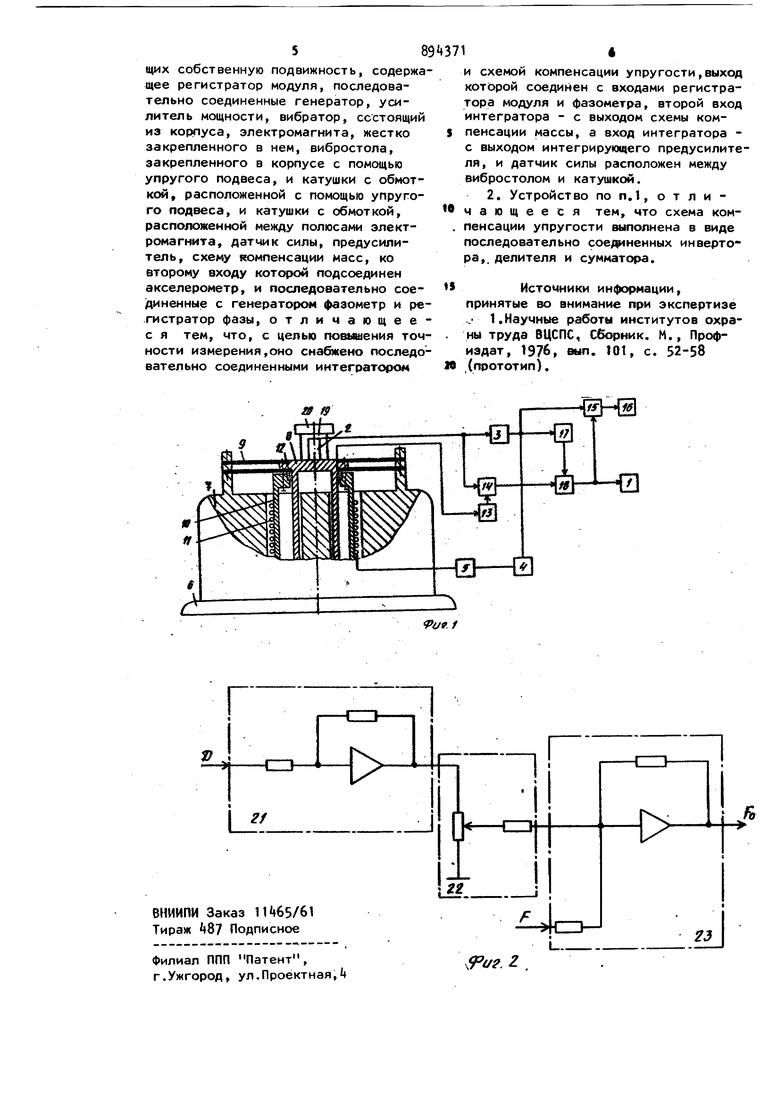
(5) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕХАНИЧЕСКОГО ИМПЕДАНСА ОБЪЕКТОВ, ИМЕЮЩИХ СОБСТВЕННУЮ Изобретение относится к вибрационной технике и предназначено для измерения механического импеданса биологических объектов. Известно устройство для измерения импеданса, содержащее регистратор модуля, последовательно соединенные акселерометр с интегрирующим предусилителем и последовательно соединенные генератор, усилитель мощности, вибратор, состоящий из корпуса, электромагнита, жестко закрепленного в нем, подвижной части (вибростола), закрепленной в корпусе с помощью упру гого подвеса, и катушки с обмоткой, расположенной между полюсами электромагнита, датчик силы, предусилитель, схему компенсации масс, ко второму входу которой пoдcoeдvlнeн акселерометр и последовательно соединенные с генератором фазометр и регистратор фазы, кроме того, содержит двухлучевой осциллограф, один выход которого соединен с выходом интегрирующего ПОДВИЖНОСТЬ предусилителя, второй вход соединен с выходом схемы компенсации масс, а выход соединен с .регистратором модуля, и датчик смещения, выход которого соединен с входом тензостанции р. Недостатком известного устройства является низкая точность, обусловленная тем, что усилия, полностью передающиеся исследуемым объектом в процессе измерения на датчик силы, вызваны не только вибровозбуждением, но и усилиями от объекта, которые существуют независимо от вибровозбуждения. В случае измерения входного импеданса руки оператора таким усилием будет неравномерное нажатие на рукоят ку, имитирующую рукоятку инструмента. От действия этой силы на выходе датчика силы возникает сигнал, который уменьшает точность измерения. Цель изобретения - повышение точ ности измерения. Указанная цель достигается тем, что устройство снабжено последовательно соединенными интегратором и схемой компенсации упругости, выход которой соединен с входами регистра тора модуля и фазометра, второй вход с выходом схемы компенсации массы, а вход интегратора - с входом интегрирующего предусилителя, и датчик силы расположен между вибростолом и катушкой. Кроме того, схема компенсации упругости выполнена в виде последова тельно соединенного инвертора, делителя и сумматора. На фиг. 1 приведена схема устройст ва для измерения импеданса; на фиг.2 схема блока компенсации упругости. Устройство содержит регистратор 1 модуля, последовательно соединенный акселерометр 2 с интегрирующим предусилителем 3. Устройство также содер k жит генератор Ч, усилитель 5 мощности, вибратор, состоящий из корпуса 6 электромагнита 7, жестко закрепленно го в нем, вибростола 8, закрепленног в корпусе 6 с помощью упругого подвеса 9, и катушки 10 с обмоткой 11, расположенной между полюсами электро магнита 7. В состав устройства входя последовательно соединенные датчик 12 силы, расположенный между вщбростолом 8 и катушкой 10, предусилител 13, схемаМ компенсации масс. Устро ство содержит последовательно соединенные с генератором k фазометр 15 и регистратор 16 фазы. Устройство та же снабжено последовательно соединенными интегратором 17 и схемой 18 компенсации упругости. На вибростоле 8 закреплен переходник 19 с расположенным на нем объектом 20 измерения. Схема компенсации упругости выполнена в виде последовательно соединенны инвертора 21, делителя 22 и сумматора 23. Устройство работает следующим образом. Генератор k через усилитель 5 мощ ности возбуждает вибростол 8 на требуемой частоте. Расположенный на вибростоле 8 переходник 19 передает виброусилие на измеряемый объект 20. Сигнал с датчика 12 силы и акселерометра 2 поступает в предусилители 3 и 13. На выходе интегрирующего предусилителя 3 с интегрированием образуется сигнал вибросилы, используемый на входе фазометра 15 и для управления генератором k с целью 1 . 4 поддержания постоянного уровня виброскорости переходника 19, а также для получения путем его интегрирования на интеграторе 17 сигнала вибросмещения вибростола 8. Датчик 12 помимо силы, вызванной взаимодействием измеряемого объекта 20 и переходника 19, измеряет силу, необходимую для приведения в движение всех движущихся масс, состоящих из переходника 19, акселерометра 2, вибростола 8, катушки 10, обмотки 11 и датчика 12, а также силу прогиба упругой подвески 9. Эти дополнительные составляющие исключены из общего сигнала для получения сигнала, соответствующего взаимодействию переходника 19 и измеряемого объекта 20. Схема 1Ц компенсации масс вычитает из сигнала датчика 12 силы ту часть, которая вызвана приведением в движение движущихся масс. Схема 18 компенсации упругости вычитает из сигналя датчика 12 силу от прогиба упругого подвеса 9, которая пропорциональна величине смещения вибростола 8,Схема 18 компенсации упругости состоит из инвертора 21, делителя 22 и сумматора 23. На вход инвертора 21 поступает сигнал вибросмещения с интегратора 17 и инвертируется,, а затем делится делителем 22. При помощи сумматора 23 из сигнала датчика 12 силы вычитается сигнал, пропорциональный силе, прогибающей упругий подвес 9. После вычитания составляющих от движения масс и прогиба упругости подвеса с использованием соответственно схемы 1 компенсации масс и схемы 18 компенсации упругости из сигнала датчика 12 силы получаем сигнал, пропорциональный силе ,взаимодействия руки и переходника, который используется для получения сигнала фазы иа фазометра 15 с этого сигнала на регистраторе 16 фазы и для записи его уровня на регистраторе 1 уровня. Использование предлагаемого устройства позволяет повысить точность изнерения импеданса биологических объектов за счет снижения влияния изменяющихся характеристик измеряемого объекта на импеданс объекта. Формула изобретения 1. Устройство для измерения механического импеданса объектов, имеющих собственную подвижность, содерж щее регистратор модуля, последовательно соединенные генератор, усилитель мощности, вибратор, состоящи из корпуса, электромагнита, жестко закрепленного в нем, вибростола, закрепленного в корпусе с помощью упругого подвеса, и катушки с обмоткой, расположенной с помощью упругого подвеса, и катушки с обмоткой, расположенной между полюсами электромагнита, датчик силы, предусилитель, схему компенсации масс, ко второму входу которой подсоединен акселерометр, и последовательно соединенные с генератором фазометр и ре гистратор фазы, отличагощее с я тем, что, с целью повышения точ ности измерения,оно снабжено последо вательно соединенными интегратором
/у 1 и схемой компенсации упругости,выход которой соединен с входами регистратора модуля и фазометра, второй вход интегратора - с выходом схемы компенсации массы, а вход интегратора с выходом интегрирующего предусилителя, и датчик силы расположен между вибростолом и катушкой. 2. Устройство по n.t, отличающееся тем, что схема компенсации упругости выполнена в виде последовательно соеданенных инвертора,, делителя и сумматора. Источники информации, принятые во внимание при экспертизе - 1.Научные работы институтов охраны труда 8ЦСПС, Сборник. М., Профиздат, 1976, вып. lot, с. 52-58 ,{гп ототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| Комплексный магнитометр-инклинометр для исследований скважин различного назначения | 2024 |
|
RU2831753C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| Способ измерения частоты и амплитуды морских ветровых волн | 1991 |
|
SU1812429A1 |
| МИКРОСИСТЕМНЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2450278C2 |
| Способ динамического гашения колебаний корпуса вибростенда | 2023 |
|
RU2827752C1 |
| ТЕРМОИНВАРИАНТНЫЙ ИЗМЕРИТЕЛЬ ЛИНЕЙНОГО УСКОРЕНИЯ | 2012 |
|
RU2528119C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАЛИЧИЯ ВОЛОКОН И НИТЕЙ | 1993 |
|
RU2087602C1 |
| Инклинометр | 1976 |
|
SU868056A1 |
| ЛАЗЕРНЫЙ ВОЛОКОННЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2129283C1 |
