Изобретение относится к балансировочной технике, может быть использовано в балансировочных станках-автоматах .
По основному авт.св. № 101.0485 известно измерительное устройство к балансировочному станку, содержащее датчик дисбаланса, подключенные к его выходу первый и второй фазовые детекторы, два амплитудных модулятора, сумматор, связанный с вькодами амплитудных модуляторов, индикатор дисбаланса и фазометр, соединенные с выходом сумматора, генератор ортогональных сигналов несущей частоты, подключенный к входам амплитудных модуляторов, два аналоговых запоминающих блока, подключенные к выходам первого и второго фазовых детекторов и вторым входом амплитудных модуляторов, и блок формирования ортогональных опорных сигналов, выполненный в. виде связанного с генератором ортогональных сигналов датчика фазы и двух, связанных между собой, датчиком фазы, фазометром и генератором третьего и четвертого фазовых детекторов, входы которых соединены с входами первого и второго фазовых детекторсв ll .
В известном измерительном устройстве процесс позиционирования ротора выполняется оператором станка вручную по показаниям фазометра, что вносит дополнительную погрешность и снижает точность позиционирования.
Цель изобретения - автоматизация процесса позиционирования ротора.
Указанная цель достигается тем, что измерительное устройство к балансировочному станку снабжено блоком управления, вьшолненным в виде двух формирователей, вход первого из которых соединен с выходом сумматора, а вход второго - с выходом датчика фазы, первого D -триггера, первого К5 триггера, R -вход которого соединен с выходом первого формирователя и с D -входом первого D -триггера, а S-вход соединен с выходом второго преобразователя и с С -входом первого D -триггера, одновибратора второго D -триггера, D -вход которого соединен с выходом одновибратора, аСвход - с входом одновибратора и выходом первого R5 -триггера, второго й5-триггера, R -вход которого соединен с выходом первого D -триггера.
блока программ, первый выход которого предназначен для связи с аналоговыми запоминающими блоками и с пер- , вым входом привода, а второй соединен с 5 -входом второго R5 -триггера, двух элементов И, первые входы которых соединены с выходом второго В5-триггера, а вторые соответственно с прямым и инверсным выходами второго D -триггера, а выходы предназначены для связи с вторым и третьим входами привода.
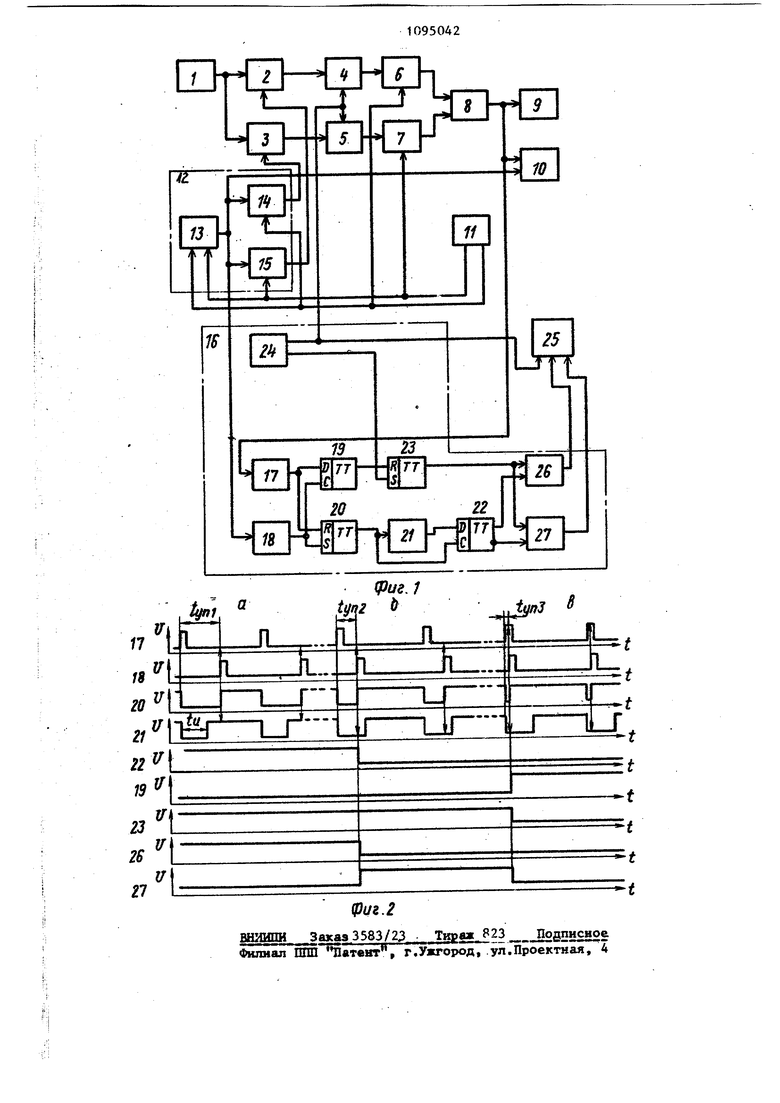
На фиг. 1 приведена структурная схема измерительного устройства к балансировочному станку; на фиг. 2 временные диаграммы элементов измерительного устройства.
Измерительное устройство к балансировочному станку содержит датчик 1 дисбаланса, подключенные к его выходу первый и второй фазовые детекторы 2 и 3, два аналоговых запоминающих блока 4 и 5, соединенных с выходами фазовых детекторов 2 и 3, два амплитудных модулятора 6 и 7, соединенные вторыми входами с выходами блоков 4 и 5, сумматор 8, соединенный с выходами амплитудных модуляторов 6 и 7, индикатор 9 дисбаланса и фазометр 10, соединенные с выходом сумматора, генератор 11 ортогональных сигналов несущей частоты, подключенный к первым входам амплитудных модуляторов 6 и 7, блок 12 формирования ортогональных опорных сигналов, который вьшолнен в виде связанного с генератором 11 ортогональных сигналов датчика 13 фазы и двух, связанных между собой, датчиком 13 фазы, фазометром 10 и генератором 11,
третьего и четвертого фазовых детекторов 14 и 15,. входы которых соединены с входами первого и второго фазовых детекторов 2 и 3.
Устройство содержит также блок 16 управления, выполненный в виде двух формирователей 17 и 18, вход первого из которых соединен с 1ыходрм сумматора 8, а вход второго - с вькодом датчика 13 фазы, первого) -триггера 19, первого R5 -триггера 20, ( -вход которого соединен с выходом первого формирователя 17 и с D -входом первого D -триггера 19, а 5 -вход соединен с выходом второго формирователя 18 и с С-входом первого 1Э -триггера, одновибратора 21, второгоD-триггера 22, D -вход которого соединен с выходом одновибратора 21, а С вход - с входом одновибратора 21 и выходом первого R5 -триггера 20, вто рого RS -триггера 23, R -вход которого соединен с выходом первого D триггера 19, блока 24 программ, первьй выход которого предназначен для связи с аналоговыми запоминающими блоками 4 и 5 и с первым входом прив да 25, а второй соединен с 5 -входом второго RS -триггера 23, двух элементов И 26 и 27, первые входы которых соединены с выходом второго R5 триггера 23, а вторые соответственно с прямым и инверсным выходами второго D -триггера 22, а выходы предназначены для связи с вторым и третьим входами привода 25. На временной диаграмме работы элементов измерительного устройства представлены уровни или форма напряжений на выходах элементов, номера которых обозначены слева от осей ординат и соответствуют номерам элементов на фиг. 1. Уровню логической единицы соответствует высокий уровень напряжения. Обозначения iuni Цп2 УП 3 указывают длительность импульсов на выходе U5 триггера 20 для случаев,когда угол позициониро.вания, т.е. угол между текущим углЪвым положением балансируемого ротора и угловым положением при коррекции дисбаланса, имеет величину (см. фиг. 2): а - большую, чем угол переключения режимов позиционирования чщ S - меньшую, чем угол переклю чения режимов позиционирования, но большую, чем угол выключения позиционирования t уп 2 и Ъ - меньшую, чем угол выключения позиционирования Обозначение указывает длительност импульсов на выходе одновибратора 2 Измерительное устройство работает в двух основных режимах: измерение параметров дисбаланса; позиционирование балансируемого ротора в положение, при котором место коррекции находится против устраняющей позиции После окончания позиционирования проводится коррекция дисбаланса по показаниям индикатора 9 дисбаланса. Привод 25 вращения балансируемого ротора может работать в одном из тре режимов: измерительное вращение,уско ренное позиционирование и медленное позиционирование. Для включения одного из перечисленных режимов на соответствующий вход привода 25 подается логическая 1, причем при включении первого режима другие режимы блокируются. Измерение параметров дисбаланса начинается с формирования на первом выходе блока 24 программ логической 1, включающей привод 25 в режим измерительного вращения, а аналоговые запоминающие блоки 4, 5 - в режим-, приема информации. -С выхода датчика 1 электрический сигнал, пропорциональный дисбалансу ротора, поступает на информационные входы фазовых детекторов 2 и 3, на управляющие входы которых подаются два ортогональных опорных сигнала с частотой вращения балансируемого ротора. Опорные сигна-. лы формируются на выходах фазовых детекторов 14 и 15 блока 12 формирования ортогональных опорных сигналов. Для этого сигнал с выхода датчика 13 фазы поступает на вторые входы фазовых детекторов 14 и 15, на первые входы которых подаются ортогональные сигналы несущей частоты с генератора 11. Датчик 13 фазы (например вращающийся трансформатор в режиме фазовращателя) питается сигналами генератора 11. Постоянные напряжения, пропорциональные проекции вектора дисбаланса, с выходов фазовых детекторов 2 и 3 поступают через аналоговые запоминающие блоки 4, 5 на информационные входы амплитудных модуляторов 6 и 7, на управляющие входы которых подаются ортогональные сигналы несущей частоты с генератора 11. Выходные сигналы модуляторов 6 и 7 поступают на.входы сумматора 8, на выходы которого вьиеляется синусоидальный сигнал несущей частоты, являющийся аналогом вектора дисбаланса в отсчетной полярной системе координат. С выхода сумматора 8 сигнал поступает на вход индикатора 9 дисбаланса и на первый вход фазометра 10, на второй вход которого подается сигнал углового положения ротора с выхода датчика 13 фазы. Фазометр 10 показывает угол между сигналом углового положения ротора и сигналом дисбаланса и используется для визуального контроля на этапе позиционирования, а индикатор дисбаланса на этапе измерения используется для выбора необходимого масштаба измерения значения дисбаланса. После окончания переходных процессов в фазовых детекторах 2, 3 блок 24 программ формирует команду на выключение режима измерительного вращения привода 25 и переключение аналоговых эапоминакнцих блоков 4, 5 в режим хранения информации. При это синусоидальный сигнал на выходе сумматора 8 определяется постоянными нап ряжениями, запоминаемыми блоками 4,5 а его амплитуда и фаза соответствуют параметрам измеренного дисбаланса. На этом этап измерения дисбаланса заканчивается. Начинается этап позиционирования балансируемого ротора в положение коррекции. После полной остановки вращения ротора на втором выходе блока 24 программ формируется иьтульс, устанавливающий R5 -триггер 23 по входу S в единичное состояние При этом на первых входах элементов И 26 и 27 устанавливается уровень логической 1, разрешающий формировать команды, включающие привод 25 в режим медленного или ускоренного позиционирования. Скорость позиционирования определяется величиной угла позиционирования, который измеряется путем сравнения фаз двух синусоидальных сигналов: аналога дисбаланса на несущей частоте и сигнала углового положения ротора. Для этого сигнал с выхода сумматора 8 поступает на формирователь 17, ас выхода датчика 13 фазы - на формировател 18. Каждый из формирователей 17 и 18 в момент перехода входного сигнала через ноль (в одном направлении) вырабатьшает короткие импульсы, кото рые поступают на R и 5 входы RS триггера 20. На выходе триггера 20 вьщеляются импульсы, длительность которых пропорциональна углу позицио нирования , Отрицательными фронтами этих импульсов (см.фиг. 2) запускается одновибратор 21, а положительными синхронизируется по С -входу D -триг гер 22. Длительность iy импульсов, генерируемых одновибратором 21, вы бирается в соответствии с выражением t.-ee- . т, 360° где ot пер- угол переключения режимов позиционирования; Т - период несущей частоты. Если угол позиционирования больше угла переключения, то длительность импульсов на выходе R5 -триггера 20 превьппает длительность импульсов одновибратора 21, а синхронизация D-триггера 22 происходит в моменты, когда на его 1Э -входе устанавливается нулевой уровень (логический ноль). В результате триггер 22 зафиксируется в нулевом состоянии, при котором на его инверсном вьгходе, на втором входе элемента И 27 и соответственно на его выходе установится логическая 1, включающая привод 25 в режим ускоренного позиционирования. Когда в процессе вращения балансируемого ротора угол позиционирования станет меньше угла переключения,D -триггер 22 переключится в единичное состояние. При этом логическая 1 установится на входе и на йыходе элемента И 26, включая привод 25 в режим медлейного позиционирования. После того, как в процессе медленного вращения балансируемого ротора угол позиционирования уменьшится до угла выключения позиционирования (значение угла выключения зависит от длительности импульсов на выходе формирователя 17 и может быть выбрано мальм), отрицательный фронт i,r,2 (фиг.2) на С -входе D ттриггера 19 совпадает с импульсом .на его D -входе, триггер 19 установится в единичное состояние и возвратит RS -триггер 23 в исходное состояние. В результате на первых входах и на выходах элементов И 26 и 27 установится нулевой уровень, запрещающий прохождение команд (единичных уровней) на второй и третий входы привода 25. На этом позиционирование заканчивается. Таким образом, балансируемый ротор будет автоматически установлен в положение, при котором место коррекции находится против устраняющей позиции. После этого производится устранение дисбаланса по показателям индикатора 9 дисбаланса. Автоматизация процесса позиционирования повышает точность и производительность балансировки.

| название | год | авторы | номер документа |
|---|---|---|---|
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1259118A1 |
| Измерительное устройство к балансировочному станку | 1986 |
|
SU1326927A1 |
| Измерительное устройство к балансировочному станку | 1983 |
|
SU1167463A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1320670A1 |
| Измерительное устройство к балансировочному станку | 1987 |
|
SU1490518A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1270595A1 |
| Измерительное устройство к балансировочному станку | 1989 |
|
SU1649328A1 |
| Измерительное устройство к балансировочному станку | 1990 |
|
SU1746232A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ | 1992 |
|
RU2054644C1 |
ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО К БАЛАНСИРОВОЧНОМУ СТАНКУ по авт. св. № 1010485, отличающееся тем, что, с целью автоматизации процесса позиционирования ротора, оно снабжено блоком управления, выполненHbw в виде двух формирователей, вход первого из которых соединен с выходом сумматора, а вход второго - с выходом датчика фазы, первого D триггера, первого RS -триггера, вход которого соединен с выходом первого формирователя и с D -входом первого D -триггера, -а 5 -вход соединен с выходом второго преобразователя и с С-входом первого D -триггера, одновибратора второго D -триггера,) вход которого соединен с выходом одновибратора, а С-вход - с входом одновибратора и выходом первого R5 триггера, второго RS -триггера, R вход которого соединен с выходом первого D -триггера, блока программ, первый выход которого предназначен для связи с аналоговыми запоминающими блоками и с первым входом привода, а второй соединен с 5 -входом второго R5 -триггера, двух элементов И, (Л первые входы которых соединены с выходом второго R5 -триггера, а вторые соответственно с прямым и инверсным | выходами второго D -триггера, а вы§ ходы предназначены для связи с вторым и третьим входами привода соответственно. ;о ел о 4 Ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Измерительное устройство к балансировочному станку | 1981 |
|
SU1010485A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
