определяют взаимную корреляционную функцию измеренных значений за определенный промежуток времени и по ее значению определяют положение исполнительного органа, при этом значение корреляционной функции в области единицы соответствует положению исполнительного органа в пределах угольного пласта, а в области нуля - в пределах боковых пород.
В устройстве датчики давления установлены в гидромагистралях поршневой и штоковой полостей гидродомкратов подъема-опускания исполнительного органа, а электронный-блок выполнен в виде коррелятора, генератора тактовых импуль.сов и узла задания временного интервала, два входа которого соединены с датчиками давления, один - с выходом генератора тактовых импульсов, а один из выходов со входом коррелятора, выход которого соединен со входом генератора тактовых импульсов.
Сущность способа заключается в то что определяют взаимную корреляционную функцию измеренных за определенный промежуток времени значений давлений в поршневой и штоковой полостя гидродомкрата подъе ма-опускания испонительного органа.При этом,если значение, корреляционной функции находится в области 1,то это соответствует положению исполнительного органа в пределах зоранного пласта, а если значительно меньше 1 и приближается к О, то исполнительный орган вышел в боковые породы.
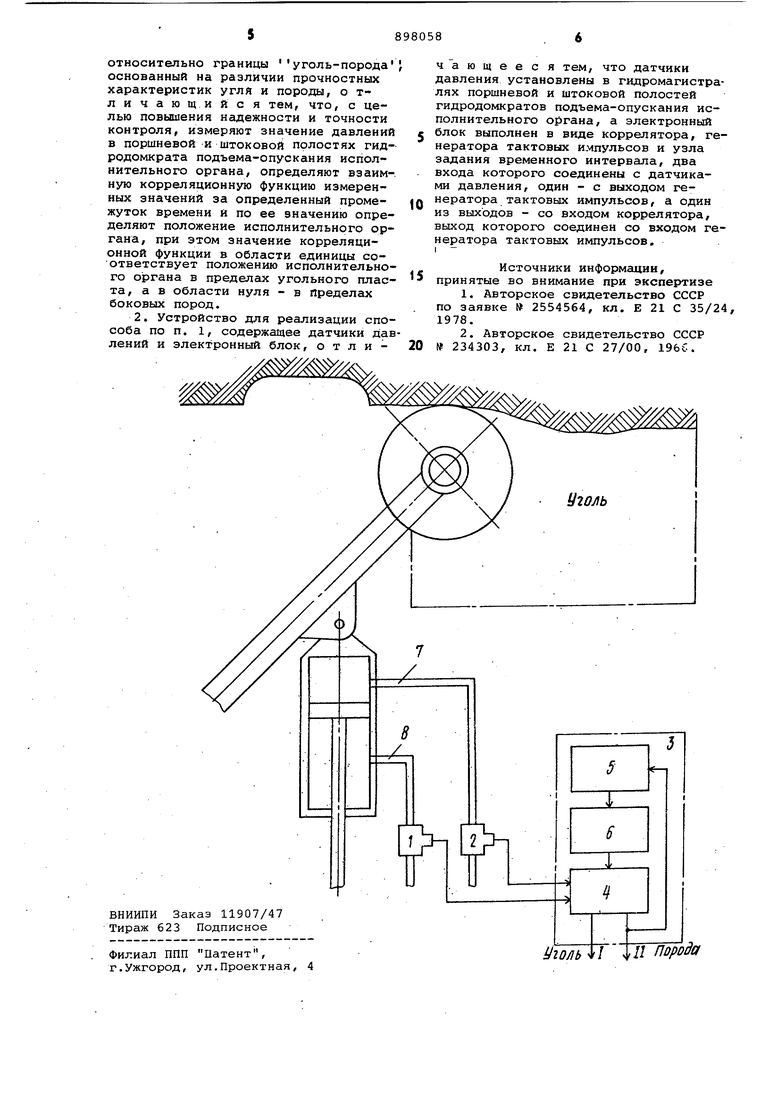
На чертеже представлена схема устройства, реализующего способ, : Датчики давления 1 и 2 связаны с электронным блоком 3, состоящим из коррелятора 4,генератора тактовых импульсов 5 и устройства задания временных интервалов б, и установлены в магистралях поршневой 7 и штоковой 8 полостей.
Устройство работает следующим образом.
С датчика давления 1, связанного со штоковой 8 полостью гидродомкрата, также как с датчика давления 2, связанного с поршневой 7 полостью гидродомкрата, сигналы поступают в электронный блок 3, состоящий из коррелятора 4, куда непосредственно поступают эти сигналы, генератора тактовыхимпульсов 5 и устройства задания временного интервала 6. Время вычисления величины взаимной корреляционной функции в цифровом виде задается генератором тактовых импульсов через устройстйО задания временного интервала. Вели исполнительный орган находится в угольном пласте, то на первом выходе - 1, а на втором выходе - О, Если исполнительный орган выходит за пределы границы уголь-порода, то на первом выходе образуется О, на втором выходе - 1 , которая в виде сигнала Сброс поступает в генератор тактовых импульсов. Далее цикл повторяется.
Кроме того, устройство работает следующим образом.
Сигнал с датчика давления 1 поступает в коррелятор 4, сигнал с датчи ка давления 2 поступает туда же. По этим сигналам коррелятор 4 вычисляет взаимную корреляционную функцию за период 1-2 с, задаваемый устройством задания временного интервала б в виде серии импульсов, сформированны: в генераторе тактовых импульсов 5. Предположим,что она равна 0,8. Тогда на 1 выходе коррелятора образуется 1, а на втором выходе0, значит исполнительный орган расположен в пределах угольного пласта. Контрольная система продолжает свою работу.
По этим сигналам коррелятор 4 вычисляет взаимную корреляционную функцию за период 1-2 с, задаваемый устройством задания временного интервала б в виде серии импульсов. В другом случае предположим, что корреляционная функция равна 0,008. Тогда на первом выходе коррелятора образуется О, на втором выходе - 1, котора может служить сама по себе сигналом аварийного уровня, или запускать какое-либо устройство индикации, в то же время сигнал с второго выхода поступает в виде сброса работы генератора тактовых импульсов 5. Это означает,что исполнительный орган вышел в боковые породы.
Преимуществами способа и устройства для реализации способа являются: использование в качестве основного источника получаемой информации самого исполнительного органа горной машины с получением отфильтрованного сигнала в гидросистеме гидродомкрата при этом в любой момент времени интегрированная информация вычисляется по всей ширине захвата исполнительного органа; простота конструктивного исполнения, не требующего разработки специальных механических устройств; .исключается транспортное запаздывание и автоматически решается сложная проблема передачи информации с подвижного датчика на неподвижный корпу горной машины. Это позволяет одновременно увеличить точность определения границы уголь-порода, повысить надежность определения границы и упростить используемую для контроля аппаратуру.
Формула изобретения
1. Способ контроля положения исполнительного органа горной машины
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Способ контроля положения исполнительного органа горной машины относительно границы порода - уголь | 1987 |
|
SU1513142A1 |
| Устройство контроля положения исполнительного органа комбайна относительно границы уголь-порода | 1981 |
|
SU987095A1 |
| Устройство контроля положения исполнительного органа горной машины относительно границы уголь-порода | 1981 |
|
SU964133A1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1985 |
|
SU1270322A1 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| Способ управления очистным комбайном в профиле пласта | 1987 |
|
SU1425321A1 |
| Устройство для автоматического вождения горного комбайна относительно границы раздела двух твердых сред | 1980 |
|
SU941574A1 |
| КОРРЕЛЯТОРВ ПТ БФшд mm? | 1972 |
|
SU424155A1 |
| Аналого-цифровой коррелятор | 1981 |
|
SU1019462A1 |
