Изобретение относится к автоматическому управлению горными машинами и может быть использовано для автоматизации управления очистными комбайнами.
Целью изобретения является повышение точности и надежности процесса управления за счет снижения динамических нагрузок на привод исполнительного органа в течение времени отработки управляющих воздействий,
В известном способе, заключающемся в определении и задании необходимой величины перемещения штока гидродомкрата исполнительного органа, подаче управляющего воздействия, измерении величины перемещения штока гидродомкрата исполнительного органа, сравнении ее с заданной величиной перемещения штока гидродомкрата исполнительного органа и, при наступлении их равенства, прекращении подачи управляющего воздействия, задают минимальную скорость движения штока гидродомкр ата исполнительного органа при отработке управляющих воздействий, задают контрольный интервал времени от начала отработки управляющего вос-щействия, измеряют скорость движения штока гидродомкрата исполнительного органа в конце контрольного интервала времени, сравнивают измеренн то величину скорости движения штока гидродонкрата исполнительного органа с заданной минимальной скоростью,при превьш1ении заданной минимальной скорости над измеренной измеряьэт и запоминают значение скорости подачи очистного комбайна, уменьпают скорость подачи до минимально В(5зможной, отличной от нуля, а сразу после окончания отработки управляющего воздействия увеличивают скорость подачи до запомненного значеНи) скорости подачи очистного комбайна.
Задание контрольного интервала времени от начала отработки управляющего воздействия необходимо для выполнения условия окончания переходных процессов в гидроприводе после коммутаций полостей гидродомкрата с напорной и сливной магистралями гидросистемы. Задание минимальной скорости движения штока гидродомкрата при отработке управляющего воздействия , измерение скорости движения штока гидродомкрата исполнительного
органа в конце контрольного интервала времени и сравнение измеренной скорости движения штока гидродомкрата с заданной минимальной скоростью необходимо для определения целесообразности снижения скорости подачи очистного комбайна. Запоминание скорости подачи очистного комбайна не0 обходимо для восстановления скорости подачи после окончания отработки управляющего воздействия.
Моделирование процессов, происходящих в гидроприводе перемещения
5 исполнительных органов, позволяет сделать следующий вывод.
Скорость движения штока гидродомкрата перемещения исполнительного органа принимает установившееся зна-,
0 чение не более чем через 0,15 с после момента включения коммутирующего электрогидравлического устройства. Эта величина оценена для различных типов горно-геологических условий,
5 встречающихся на шахтах Советского Союза. Исходя из этого контрольный интервал времени, в конце которого измеряется скорость движения штока пгдродомкрата, можно выбрать 0,15 с.
0 Конструкции всех существующих и перспективных типов очистных комбайнов, оснащенных аппаратурой автомат тизации, предусматривают ступенчатую регулировку скорости подачи. В раз5 личных типах регуляторов уставки по скорости могут отличаться по величи-. не и по количеству. Поэтому в качестве минимальной скорости подачи, отличной от нуля, можно выбрать наи0 меньшую уставку конкретного регулятора.
Модельные исследования процесса управления перемещением исполнительного органа, выполненные для различ5 ньгх видов горно-геологических условий и физико-механических свойств угля и включающих пород, позволили установить уровень минимальной скорости движения штока гидродомкрата. Он составляет 0,3 см/с.
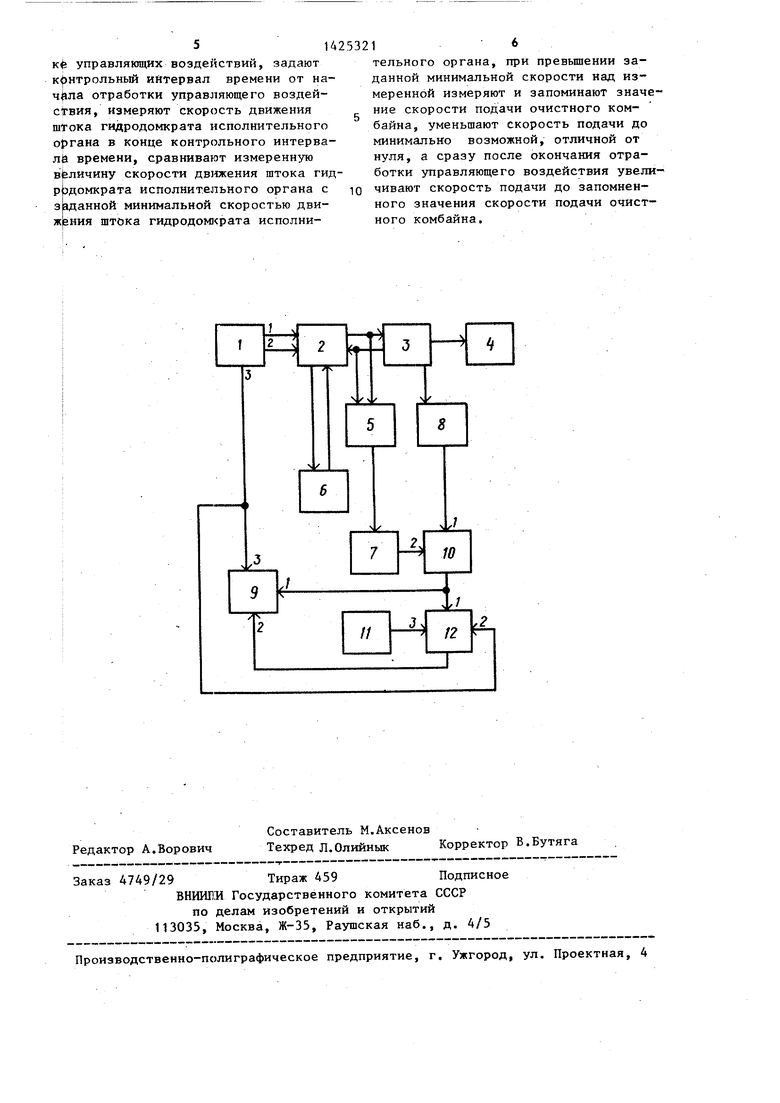
На чертеже представлена укрупнен- ная функгщональная схема системы для реализации способа управления очистным комбайном.в профиле пласта.
В состав системы входит подсистема 1 ( ПС-ПП) управления комбайном в профиле пласта, коммутирующее устройство 2, гидродомкрат 3, исполнительный орган 4, индикатор 5 расхода.
0
5
гидромагистрали 6, реле 7 времени, датчик 8 скорости штока гидродомкра- та, подсистема 9 управления скорость подачи, блок 10 сравнения скорости штока, датчик 11 скорости подачи, блок 12 памяти. Первый и второй выходы подсистемы 1 управления комбайном в профиле пласта соединены с электрическими выходами коммутирую- щего устройства 2. Гидравлически коммутирующее устройство 2 связано с напорной и сливной гидромагистралями бис поршневой и штоковой полостями гидродомкрата 3, которьй меха- нически связан с исполнительньм органом 4. Входы индикатора расхода 5 связаны с поршневой и штоковой магистралями гидродомкрата.
Датчик 8 скорости штока гидродом- крата связан с гидродомкратом 3. Вход реле 7 времени связан с выходом индикатора 5 расхода. Первый вход блока 10 сравнения скорости связан с выходом датчика 8 скорости штока, а второй вход - с выходом реле 7 времени. Выход блока 10 сравнения скорости связан с первым входом подсистемы 9 управления скоростью подачи и с первым входом блока 12 памяти, выход которого связан с вторым входом подсистемь 9 управления скорость подачи. Выход датчика 11 скорости подачи связан с третьим входом блока 12 памяти. Третий выход ПС-Ш1 1 свя- зан с третьим входом ПС-ПК 9 и с вторым входом 12 блока памяти.
ПС-Ш1 может представлять собой любую из известных систем как следящих, так и программных. ПС-ПП также может быть реализована в виде любой из разработанных систем управления скоростью подачи.
Способ управления очистным комбайном в профиле пласта с помощью опи- санной системы осуществляют следукяци образом.
В подсистеме 1 управления комбайном в профиле пласта вьфабатывается сигнал управления положением испол- нительного органа 5, который поступает на вход коммутирукяцего устройства 2. После коммутации гищ)омагист рапей 6 с соответствующими полостями гидродомкрата 3 в системе появляется расход рабочей жидкости, который регистрируется индикатором 5 расхода, который подает сигнал на вход реле 7 времени, где осуществляется вьщержка
контрольного интервала времени, по окончании которого на второй вход блока 10 сравнения скорости поступае сигнал сравнения скорости штока.
На выходе датчика скорости штока сигнал несет информацию о величине скорости штока. Этот сигнал подается на первый вход блока 10 сравнения скорости. Если скорость штока окажется меньше уставки, на которую настроен блок 10 сравнения скорости, то на первый вход подсистемы 9 управления скоростью подачи подается сигнал о необходимости (тринудительного снижения скорости, подачи. Этот же сигнал приходит на первый вход блока 12 памяти и разрешает запоминание последнего значения скорости подачи, которая измеряется датчиком 11 скорости подачи, сигнал с которого приходит на третий вход блока 12 памяти По окончании отработки управления исполнительньм органом на втором выходе подсистемы 1 управления комбайном в профиле пласта вырабатывается сигнал, который поступает на третий вход подсистемы 9 управления скоростью подачи и разрешает восстановление скорости подачи до величины, запомненной в блоке 12 памяти. Этот же сигнал приходит на второй вход блока 12 памяти и обнуляет его содержимое. Таким образом, восстанавливается исходное состояние системы.
Формула изобретения
Способ управления очистным комбайном в профиле пласта, заключающийся в определении и задании необходимой величины перемещения штока гидродомкрата исполнительного органа, подаче управляющего воздействия, измерении величины перемещения штока гидродомкрата исполнительного органа, сравнении ее с заданной величиной перемещения штока гидродомкрата исполнительного органа и, при наступлении их равенства, прекращении подачи управляющего воздействия, отличающийся тем, что, с целью повьш1ения точности и надежности процесса управления за счет снижения динамических нагрузок на привод исполнительного органа в Т е- чение времени отработки управляющих воздействий, задают минимальную скорость движения штока гидродомкрата исполнительного органа при отработк управляющих воздействий, задают контрольный интервал времени от на- отработки управляющего воздействия, измеряют скорость движения шТока гидродомкрата исполнительного о|5гана в конце контрольного интерва- лй времени, сравнивают измеренную величину скорости движения штока гидродомкрата исполнительного органа с заданной минимальной скоростью движения штока гидродомкрата исполни
тельного органа, при превьппении заданной минимальной скорости над измеренной измеряют и запоминают значение скорости подачи очистного комбайна, уменьшают скорость подачи до минимально возможной, отличной от нуля, а сразу после окончания отработки управляющего воздействия увеличивают скорость подачи до запомненного значения скорости подачи очистного комбайна.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ программного управления очистным комбайном,работающим со става конвейера,и система программного управления очистным комбайном | 1984 |
|
SU1236103A1 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1985 |
|
SU1270322A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1986 |
|
SU1423738A1 |
| Система программного управления угледобывающим комбайном | 1988 |
|
SU1610002A2 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
Изобретение относится к автоматическому управлению горными машинами. Цель - повьш1ение точности и надежности процесса управления за счет снижения динамических нагрузок на привод исполнительного органа в течение времени отработки управляющих воздействий. Для этого определяют и задайт необходимую величину перемещения штока гидродомкрата исполнительного органа (ИО). Задают его минимальную скорость движения при отработке управляющих воздействий. За- .дают контрольный интервал времени от начала отработки управляющего воздействия. Измеряют скорость движения штока гидродомкрата ИО в конце контрольного интервала времени. Сравнивают ее с заданной минимальной скоростью и при превьшении последней над измеренным значением измеряют и запоминают скорость подачи очистного комбайна. Уменьшают скорость Подачи до минимально возможной, отличной от нуля. Измеряют величину перемещения штока гидродомкрата ИО и сравнивают ее с заданной. При наступлении равенства этих величин прекращают подачу управляющего воздействия. Затем увеличивают скорость подачи очистного комбайна до запомненного значения. 1 ил.-. (Л 1C ел со to
| Толпежников Л.И | |||
| Автоматическое управление процессами шахт и рудников | |||
| М.: Недра, 1985, с | |||
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| О реализации электрогидравлического регулятора перемещения режущих органов горной машины | |||
| Рукопись деп | |||
| в ЦНИЭИуголь, № 3390, М., 1985. | |||
