(54) СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
КОМБАЙНОМ ПО ГИПСОМЕТРИИ ПЛАСТА И УСТРОЙСТВО
Д.ПЯ ЕГО ОСУЩЕСТВЛЕНИЯ
1
Изобретение относится к автоматическому управлению горными машинами, а именно к способам и устройствам автоматического вождения комбайна по гипсометрии пласта..
Известен способ управления горными машинами по гипсометрии пласта, основанный на определении усилия, действующего на специальный измерительный резец во время прохождения им у кровли или у почвы пласта. При этом сигнал, пропорциональный усилию резания, получаемый за каждый оборот исполнительного органа, сравнивается с заданной постоянной уставкой при резании угля или -породы и по результату этого тфавнения вырабатывают команду для поддержания необходимого положения исполнительного органа относительно границы уголь-порода
Устройство для осуществления указанного способа, включает чувствительный резец с датчиком, токосъемник и датчик положения резца, которые воздействуют на электронный блок управления 1.
Известные способ, и устройство обладают сложностью технической реализации, низКОЙ надежностью и точностью контроля и управления.
Известен также способ автоматического управления комбайном по гипсометрии пласта, основанный на измерении давления в гидродомкрате подъема-опускания исполнительного органа при рабочей нагрузке горной машины с помощью двух датчиков давления и вычислении взаимной корреляционной функции за определенный промежуток времени.
Известно устройство для осуществления этого способа, содержащее гидродомкрат подъема-опускания исполнительного органа, электрогидрораспределители, два датчика давления, установленные в поршневой и щтоковой полостях гидродомкрата и подключенные к усилителям, коррелятор, блок задания временного интервала и генератор тактовых импульсов, выход которого через блок задания временного интервала подключен к коррелятору 2 .
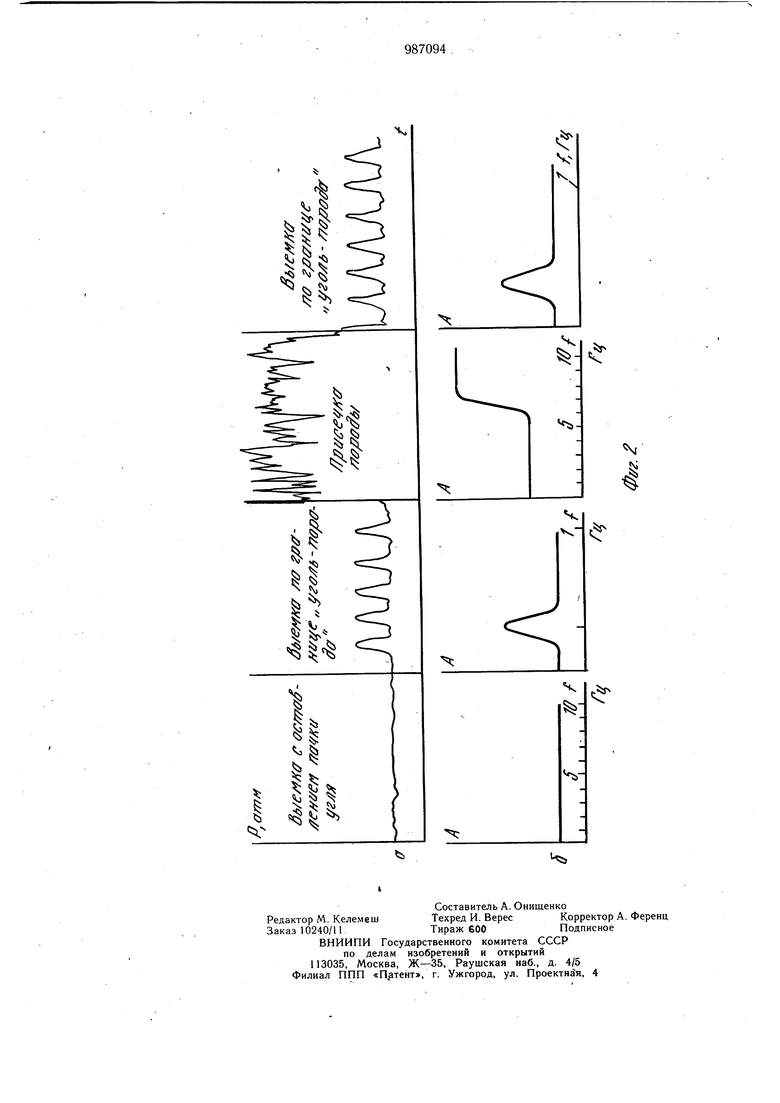
Недостатками известного способа и устройства для его осуществления являются низкая точность, связанная с получением на выходе коррелятора только сигнала «Порода, и низкая экспрессность, обусловленпая необходимостью получения взаимно корреляционной функции за длительный интервал времени. Цель изобретения - повышение точности и быстродействия. Указанная цель достигается тем, что согласно способу автоматичесого управления комбайном по t-ипсометрии пласта, основанному на измерении давления в гидродомкрате подъема-опускания исполнительного органа при рабочей нагрузке горной машины. выделяют составляюшую давления на частоте вращения исполнительного органа и соетавляющую давления на частотах, превыгнающих частоту вращения исполнительного органа, и регулируют положение исполнительного органа в зависимости от наличия выделенных частот. . Кроме того, устройство для автоматического управления комбайном по гипсометрии пласта, содержащее гидродомкрат подъемаопускания исполнительного органа, электрогидрораспределители и датчик давления, установленный в гидродомкрате и подключенный к усилителю, снабжено полосовым фильтром, фильтром верхних частот, двумя схемами отрицания, датчиком рабочей нагрузки горной машины и двумя схемами совпадений, причем выход усилителя соединен с входами полосового фильтра и фильтра верхних частот, выход которого соединен с первым входом первой схемы совпадений и через первую схему отрицания с первым входом второй схемы совпадений, второй вход которой через вторую схему отрицания соединен с выходом полосового фильтра, а выход датчика рабочей нагрузки горной машины - со вторым входом первой схемы совпадений и третьим входом второй схемы совпадений, при этом выходы схем совпадений соединены с входами электрогидропереключателей. На фиг. 1 изображена блок-схема устройства для осуществления предлагаемого способа; на фиг. 2 - графики получаемых сигналов и соответствующие им амплитудно-частотные характеристики. Устройство содержит датчик 1 давления, подключенный ко входу усилителя 2, выход которого соединен с входами блока 3 обработки сигнала, и датчик 4 рабочей нагрузки горной машины. В состав горного комбайна входят электрогидрораспределители 5 и 6. Блок 3 обработки сигнала содержит полосовой фильтр 7, фильтр 8 верхних частот, трехвходовая схема 9 совпадений, схема 10 отрицания, двухвходовая схема 11 совпадений и схема 12 отрицания. Датчик 1 давления установлен в гидродомкрате 13 и соедийен с усилителем 2, выход которого соединен с входами полосового фильтра 7, и фильтра 8 верхних частот, выходкоторого соединен с первым входом первой схемы 11 совпадений и через первую схему 12 отрицания соединен с первым входом второй схемы 9 совпадений, второй вход которой через вторую схему 10 отрицания соединены с выходом полосового фильтра 7, а выход датчика 4 рабочей нагрузки горной машины соединен со вторым входом первой схемы 11 совпадений и третьим входом второй схемы 9 совпадений, при этом выходы схемы 9 и 11 совпадений соединены с входами электрогидрораспределителей 5 и 6, подающих рабочую жидкость в поршневую или штоковую полости гидродомкрата 13 подъемаопускания исполнительного органа комбайна. На исполнительном органе комбайна на одной и той же образующей (с вылетом, превышающим вылет рабочих резцов) установлены контрольные резцы 14. Способ с помощью устройства осуществляется следую1дим образом. С датчика 1 давления сигнал поступает в усилитель 2. С усилителя сигнал поступает на полосовой фильтр 7 и фильтр 8 верхних частот в блоке 3 обработки сигнала. Если исполнительный орган производит выемку с оставлением пачки угля больше заданной, то на выходе полосового фильтра 7 и фильтра 8 верхних частот йет сигнала, а на выходе логических схем 10 и 12 отрицания появляются сигналы «1, за счет чего и на выходе схемы 9 совпадений, на которую также воздействует датчик 4 рабочей нагрузки горной машины, появляется сигнал «1. Этот единичный сигнал включает гидрораспределитель 5, и исполнительный орган гидродомкратом 13 перемешается в сторону границы уголь - порода, Если исполнительный орган производит выемку по границе уголь - порода, т.е. резцы 14 присекают породу, а сам исполнительный орган двигается по углю, то на выходе полосового фильтра 7 появляется сигнал, так как на амплитудно-частотной характеристике (см. фиг. 2 б), соответствуюЩей данному случаю, явно видно преобладание амплитуды с частотой, равной частоте врашения исполнительного органа. Тогда на выходе логической схемы 10 отрицания сигнал стает равным «О. Нулевой сигнал будет при этом и на выходе фильтра 8 верхних частот. Появление нулевых сигналов на схем 9 и 11 совпадений приводит к тому что сигналы на их выходах отсутствуют и электрогидрораспределители 5 и 6 отключены, и исполнительный орган удерживается в неизмененном ранее установленном положений, осуществляя при этом выемку угля только по границе уголь-порода. Если далее исполнительный орган присекает породу, то в гидродомкрате подъема-опускания исполнительного органа резко увеличивается частота вибраций, что также характерно видно на амплитудно-частотной характеристике, (см. фиг. 2 а, б), которая воспринимается датчиком 1 давления и через усилитель 2 выделяется на выходе фильтра 8 верхних частот. Сигнал с выхода фильтра 8 верхних частот поступает на вход схемы 11 совпадений, куда также постулает сигнал с датчика 4 рабочей нагрузки, что заставляет схему 11 совпадения выдать на выходе сигнал «1, который приводит к включению гидропереключателя 6 и к перемещению исполнительного органа гидродомкратом 13 в сторону угольного массива, т.е. от границы уголь - порода. Таким образом, устройство работает непрерывно, осуществляя ведение исполнительного органа по гипсометрии пласта. Пример 1. Исполнительный орган производит выемку с оставлением большой пачки угля. Амплитудно-частотная характеристика (фиг. 2 б) имеет постоянную небольщую амплитуду на всем диапазоне контролируемых частот. В этом случае на выходах полосового фильтра 7 и фильтра 8 верхних частот сигнал равен «О вследствие отсутствия соответствующих частот в спектре сигнала, получаемого с датчика 1 давления и усилителя 2. Сигналы «1 с выходов логических схем 10 и 12 отрицания поступают йа вход схемы 9 совпадения. На нее также поступает сигнал с датчика 4 рабочей нагрузки горной машины. Эти сигналы вызывают появление на выходе схемы 9 совпадения сигнала «1, что приводит к срабатыванию электрогидропереключателя 5. Поэтому исполнительный орган перемещается в сторону границы уголь-порода. Пример 2. Исполнительный орган производит выемку по границе уголь-порода, т.е. вьщвинутые контрольные резцы 14 присекают породу, а сам исполнительный орган двигается по углю. В этом случае в сигнале, поступающем от датчика 1 давления, наблюдается периодическая составляющая больщой амплитуды, с частотой, равной частоте вращения исполнительного органа, т.е. с частотой примерно равной f 0,5 Гц. При наличии этой частоты на выходе полосового фильтра 7 появляется сигнал, а на 1выходе логической схемы Л О отрицания сигнал стает равным «О. На выходе фильтра 8 верхних частот, .также сигнала нет. Гидропереключатели 5 и 6 остаются отключенными, и исполнительный орган остается в установленном положении, осуществляя выемку по границе уголь.-порода. Пример 3. Исполнительный орган присекаёт породу, например, на 10 см. В этом случае частота пульсаций давления в гидродомкрате 13 подъема-опускания исполнительного органа увеличивается до 5-7 Гц (см. фиг. 2а, б). Тогда на выходе фильтра 8 верхних частой появляется сигнал «I, который поступает на схему 11 совпадения. Туда же подходит и сигнал от датчика 4 рабочей нагрузки горной мащины. На выходе схемы. 11 совпадения появляется сигнал «1, который приводит к включениюгидропереключателя 6 и перемещению исполнительного органа в ст.орону угольного массива, т.е.от границы уголь-порода. Основной особенностью способа и устройства является то, что предлагаемый принцип автоматического управления движением исполнительного органа горной мащины позволяет работать с оста,вленкем заанной пачки угЛя, т.е. практически без рисечки породы и, следовательно, с высоой эффективностью. При этом весьма важно то, что настройка работы устройства может быть осуществлена непосредственно в процессе его изготовления, .т.е. практически в заводских условиях, поскольку скорость вращения исполнительных органов горных, мащин при нормальном режиме работы является достаточно стабильной. Не менее важно и то, что эффективность работы устройства по предлагаемому способу практически не зависит (в отличие от известного способа и устройства) от углового положения поворотного редуктора (качалки) исполнительного органа, т.е. от вынимаемой мощности пласта. Преимуществом изобретения является также возможность автоматического и дистанционного управления комбайном, повыщение безопасности иулучшение условий работы мащиниста. Формула изобретения 1.Способ автоматического управления комбайном по гипсометрии пласта, основанный на измерении давления в гидродомкрате подъема-опускания исполнительного органа при рабочей нагрузке горной мащины, отличающийся тем, что, с целью повыщения точности и быстродействия, выделяют составляющую давления на частоте вращения исполнительного органа и составляющую давления на частотах, превышающих частоту вращения исполнительного органа, и регулируют положение исполнительного органа в зависимости от наличия выделенных частот. 2.Устройство для осуществления способа по п. I, содержащее гидродомкрат подъема-опускания исполнительного органа электрогидрораспределители, и датчик давления, установленный в гидродомкрате и подключенный к усилителю, отличающееся тем, что оно снабжено полосовым фильтром, фильтром верхних частот, двумя схемами отрицания, датчиком рабочей нагрузки горной мащины и двумя схемами совпадений, причем выход усилителя соединен с входами полосового фильтра и фильтра верхних частот, выход которого соединен с первым входом первой .схемы совпадений и через первую схему отрицания с первым входом второй схемы совпадений, второй вход которой через вторую схему отрицания соединен с выходом полосового фильтра, а выход датчика рабочей нагрузки горной мащины - со вторым входом первой схемы совпадений и третьим входом второй схемы совпадений, при этом выходы схем совпадений соединены с входами электрогидропереключателей. Источники информации, принятые во внимание при экспертизе 1. Комплексная механизация и автоматизация очистных работ в угольных шахтах. М., «Недра, 1977, с. 286-287 (регулятор «Рубин). 2. Авторское свидетельство СССР по заявке № 2903270/22-03, кл. Е 21 С 35/24, 5 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления исполнительным органом горной машины по гипсометрии пласта | 1985 |
|
SU1270322A1 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1977 |
|
SU899933A1 |
| Устройство автоматического управления угледобывающей машиной в профиле пласта | 1978 |
|
SU964138A2 |
| Устройство для автоматического управления угледобывающей машиной в профиле пласта | 1983 |
|
SU1132012A2 |
| Способ автоматического управления очистным комбайном по гипсометрии пласта и система для его осуществления | 1985 |
|
SU1270323A1 |
| Устройство для контроля положения исполнительного органа горной машины в профиле пласта | 1982 |
|
SU1040142A1 |
| Устройство контроля положения исполнительного органа комбайна относительно границы уголь-порода | 1981 |
|
SU987095A1 |
| Устройство для автоматического вождения горного комбайна относительно границы раздела двух твердых сред | 1980 |
|
SU941574A1 |
| Устройство автоматического вождения горного комбайна по гипсометрии пласта | 1980 |
|
SU949175A2 |
| Способ автоматического управления очистным комбайном | 1983 |
|
SU1133394A1 |
0yzJ
