Изобретение относится к обогатительной технике и может быть использовано при автоматизации разделительных и других процессов, имеющих транспортное запаздывание.
Известно устройство автоматического управления процессом обогащения, например отсадки, содержащее датчик контроля параметров, регулятор, исполнительный механизм til
Недостатком известного устройства является отсутствие учета транспортного запаздывания.
Известно устройство для автоматического управления процессом обогащения, содержащее датчик контроля параметра., задакяцее устройство, . соединенный.через регулятор с. исполнительным механизмом 2 .
Недостатком известного устройства является низкое качество автоматического управления, обусловленное значительной величиной транспортного запаздывания,-обусловленного большими емкостями технологических аппаратов и др. причинами, а также установкой датчика измеряемого параметра за пределами объекта (емкости, конвейера и т.п.).
Цель изобретения - повышение точности автоматического управления. Поставленная цель достигается тем, что устройство снабжено блоком расчета величины транспортного запаздывания, последовательно соединенным физической моделью процесса без транспортного запаздывания с датчиком, элементом задержки,вторым
10 сумматором, второй вход которого соединен с датчиком контроля параметра, а выход с одним из входов физической модели процесса без транспортного запаздывания, второй вход
15 кбторой подключен к выходу исполнительного механизма, а выход соединен с сумматором, причем выход блока расчета величины транспортного запаздывания подключен,ко .второму
20 входу элемента задержки.
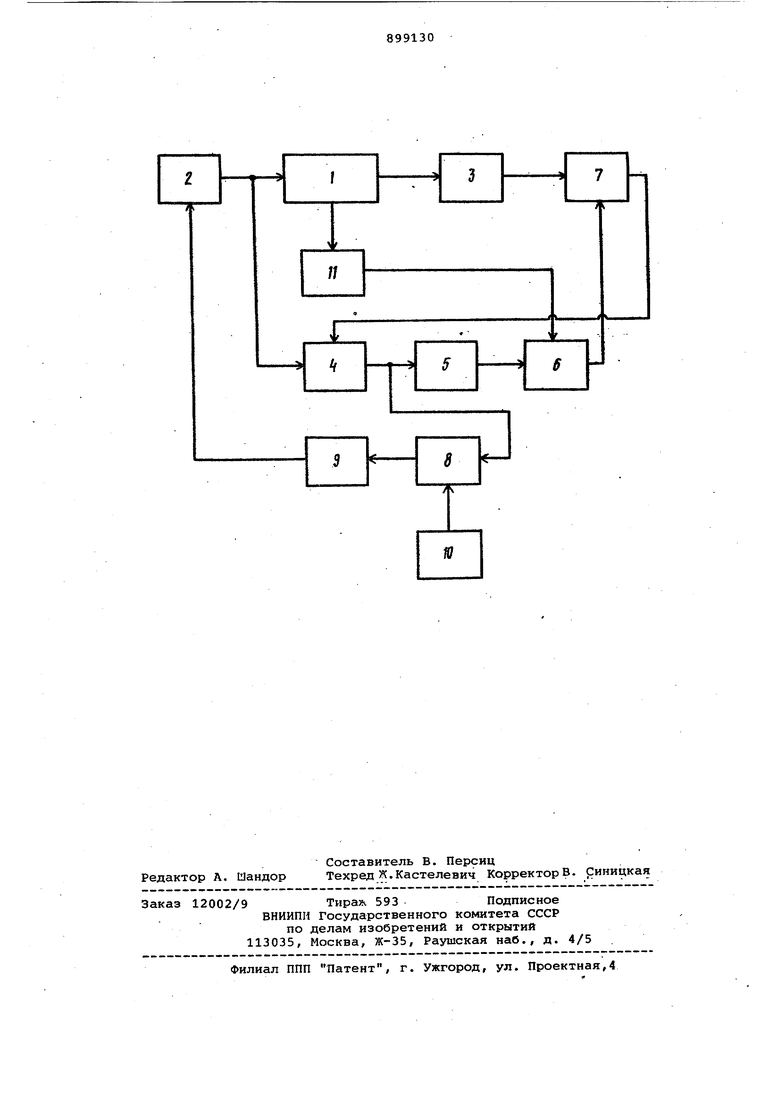
На чертеже представлена.схема предлагаемого устройства.
Устройство управления процессом 1 содержит, исполнительный механизм
25 2, датчик 3 контроля параметра, модель 4 процесса без учета трансповтного запаздывания, с датчиком 5 контроля параметра, элемент б задержки, второй сумматор 7, первый
30 сумматор 8, регулятор 9, задаюЬхее
устройство 10, блок 11 расчета времени т ранспортного запаздывания.
Устройство работает следующим образом.
Значение контролируемого параметра процесса 1(плотность суспензии, расход пульпы, производительность дозатора и т.п.) на выходе процесса или обогатительного аппарата измеряется датчиком 3 этого -параметра. Управление процессом осуществляется посредством исполнительного механизма 2.
Сигнал с выхода исполнительного механизма 2 подается на входы процесса 1 .и модели 4 процесса без учета транспортного запаздывания. С выхода модели процесса через датчик 5 контроля параметра -и элемент 6 задержки сигнал подается на вход второго сумматора 7, где вычитается иэ сигнала датчика 3 параметра. Разность сигналов сумматора 7 подается на вход модели 4 изменяя значения ее параметров (например, постоянной времени коэффициента усиления и т.п обычно имеющие место в обогатительных аппаратах) таким образом, чтобы суммарный сигнал равнялся нулю.
С выхода модели 4 сигнал подается на вход первого сумматора 8, т.е сигнал, .нь8й сигналу на выходе процесса обогащения без транспортного запаздавания. Последний сравнивается с заданием, поступающи от задатчика 10 и через регулятор 9 воздействует на исполнительный механизм 2, управлякяций процессом и его моделью.
При переменном транспортном запаздывании, обь1чно именвдем место в технологии обогащения, время его измеряется блоком 11 и воздействует на элемент б задержки, обеспечивая равенство времен запаздывания и задержки .
Использование изобретения в автоматических системах управления с транспортным запаздыванием, например, процессами обогащения., позволит существенно снизить дисперсию регулируемых параметров, что снижает потери полезных компонентов с отходами обогащения.
Формула изобретения
Устройство для автоматического управления-процессом обогащения, содержащее датчик контроля параметра, задаквдее устройство, сумматор, регулятор и исполнительный механизм, отличающееся тем, что, с целью повышения точности управления, оно снабжено блоком расчета величины, транспо этного запаздывания, последовательно соединенными физической моделью процесса без транспортного запаздывания с датчиком, элементом задержки, вторым сумматором, г второй вход которого соединен с датчиком контроля параметра, а выход с одним из входов физической модели процесса без транспортного запаздывания, второй вход которой подключен к выходу исполнительного механизма, а 1выход соединен с сумматором, причем выход блока расчета величины транспортного запаздывания подключен ко второму входу элемента задержки.
Источники, информации,
принятые во внимание при экспертизе
1.Синепольский B.C., Сердюк Н.С. Принципы комплексной автоматизации процесса отсадки. - Обогащение и бректирования угля, г 3, 1975,
с. 15.
2.Персиц В.З. и др. Автоматизация контроля и оптимального управления флотацией, М., Цветметинформация, 1978, с. 38-40.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления процессом обогащения | 1979 |
|
SU971473A1 |
| Способ автоматического регулирования процессов углеобогащения и устройство для его осуществления | 1982 |
|
SU1063466A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ СУШКИ СЫПУЧИХ МАТЕРИАЛОВ | 1998 |
|
RU2152572C1 |
| Система автоматического регулирования плотности суспензии в тяжелосредных обогатительных аппаратах | 1990 |
|
SU1759476A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Устройство для регулирования объекта с запаздыванием | 1977 |
|
SU911463A1 |
| Устройство для автоматического управления процессом магнитного обогащения железных руд | 1987 |
|
SU1479106A1 |
| СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ТРАНСПОРТНЫМ ЗАПАЗДЫВАНИЕМ | 1994 |
|
RU2079868C1 |
| Устройство для регулирования обогатительных аппаратов | 1982 |
|
SU1007736A1 |