Изобретение относится к автоматическому управлению и регулированию и может быть использовано при автоматическом управлении объектами с рециклом, в которых часть получаемого готового продукта (вещества) поступает на выход объекта, а другая часть (рецикл) возвращается с запаздыванием на вход объекта. При этом регулируемое выходное воздействие объекта равно воздействию, поступающему на рецикл. К таким выходным воздействиям можно отнести характеристики качества выходного продукта объекта управления (в частности, концентрация элементов в выходном продукте объекта). Количество или расход готового продукта, поступающего на выход объекта, не является регулируемой выходной величиной объекта управления. Регулирование объекта осуществляется посредством управляющих воздействий по двум каналам управления:
- координатного управляющего воздействия (например, расход или характеристика качества материала, поступающего на обработку в объекте управления), изменения которого влияют непосредственно на регулируемое выходное воздействие объекта;
- параметрического управляющего воздействия (например, соотношение между количеством или расходом готового продукта, поступающего на выход объекта управления и поступающего в цепь рецикла объекта управления), изменения которого влияют на динамические характеристики канала преобразования изменений координатного управляющего воздействия в изменения регулируемой выходной величины объекта.
Динамика объекта по каналам управления и преобразования внешних воздействий описывается зависимостями:











где: Y(t) - текущее значение регулируемого выходного воздействия объекта (характеристики качества выходного продукта объекта);
Yl(t) - текущая величина изменения регулируемого выходного воздействия объекта под влиянием координатного управляющего воздействия;
Yr(t) - текущая величина изменения регулируемого выходного воздействия объекта под влиянием воздействия по цепи рецикла;
ω(t) - приведенное к выходу объекта управления неконтролируемое возмущающее воздействие, соответствующее совокупному влиянию на выходное воздействие объекта всех его неконтролируемых внешних воздействий;
U1(t) - координатное управляющее воздействие;
U2(t) - параметрическое управляющее воздействие;
Q*=const - расход готового продукта, поступающего из реакционной зоны объекта управления;
α* и α(t) - соответственно, базовая и текущая величина доли готового продукта, возвращаемого в объект управления по цепи рецикла в зависимости от текущего положения регулирующего органа (делителя потока);
Qв(t) - расход готового продукта, поступающего на выход объекта управления;
Qr(t) - расход готового продукта, поступающего в цепь рецикла объекта управления;




T1(Qr,t) и K1(Qr,t) - текущие значения параметров, характеризующих динамику канала преобразования изменений без запаздывания координатного управляющего воздействия U1(t) при текущей величине расхода Qr(t) готового продукта, поступающего в цепь рецикла объекта управления;
τ1=const - транспортное запаздывание в канале преобразования изменений координатного управляющего воздействия U1(t);
Tr=const и Kr=const - значения параметров, характеризующих динамику канала преобразования изменений без запаздывания расхода Qr(t) готового продукта, поступающего в цепь рецикла объекта управления;
τr=const - транспортное запаздывание в канале преобразования изменений Qr(t) готового продукта, поступающего в цепь рецикла объекта управления;
а 1 и а 2 - коэффициенты пересчета изменений значений технологических переменных в изменения параметров канала преобразования координатного управляющего воздействия (блока первого канала управления);
Kро - коэффициент передачи делителя потока; полагая Kpo=1 (что обычно и выполняется), получаем α(t)=U2(t);
δQr(t) - текущие отклонения расхода готового продукта, поступающего в цепь рецикла объекта управления от его базового значения под влиянием параметрического управляющего воздействия U2(t);
δV(Qr,t) - текущие изменения количества обрабатываемого материала, находящегося в объекте управления, определяющие текущие изменения численных значений параметров, характеризующих динамику канала преобразования изменений координатного управляющего воздействия.
При этом с уменьшением доли готового продукта, возвращаемого в объект управления по цепи рецикла, уменьшается количество обрабатываемого материала, находящегося в объекте управления. Это влечет за собой снижение инерционности канала преобразования координатного управляющего воздействия на величину δT(Qr,t)=a 1V(Qr,t). Одновременно возрастает степень влияния управляющих воздействий по первому каналу управления на величину регулируемого выходного воздействия объекта, что находит свое отражение в увеличении абсолютной величины коэффициента передачи этого канала на величину δK1(α,t)=a 2δα(t). Здесь а 1 и a 2 коэффициенты пересчета изменений значений технологических переменных в изменения параметров канала преобразования координатного управляющего воздействия (блока первого канала управления.
Задача управления заключается в поддержании заданного значения регулируемого выходного воздействия объекта посредством координатного управляющего воздействия по первому каналу управления. Для уменьшения интегральной ошибки регулирования при значительных отклонениях регулируемого выходного воздействия от заданного значения можно посредством параметрического управляющего воздействия U2(t) по второму каналу управления изменять динамические характеристики канала преобразования координатного управляющего воздействия. Благодаря этому можно сократить время переходного процесса в контуре координатного управления и уменьшить интегральную ошибку регулирования.
Примерами указанного объекта могут служить технологические комплексы приготовления и циркуляции магнетитовой суспензии при обогащении рядовых углей в тяжелой среде на тяжелосредных сепараторах или на тяжелосредных гидроциклонах. Готовым продуктом является кондиционная магнетитовая суспензия, отгружаемая с постоянным расходом Q(t) из емкости кондиционной суспензии, измеряемым в 


Известна система управления [а.с. СССР №1244636, G05B 13/02, 1980], содержащая задатчик, последовательно включенные объект регулирования, датчик, первый сумматор, измеритель рассогласования, регулирующий блок, второй сумматор, экстраполятор, исполнительный механизм, выход которого подключен к входу объекта регулирования, последовательно включенные первый блок задержки, третий сумматор, четвертый сумматор, модель прямого канала, первый масштабирующий блок, второй блок задержки, выход которого подключен к второму входу четвертого сумматора, последовательно включенные второй масштабирующий блок и третий блок задержки, выход которого соединен с вторым входом второго сумматора, выход экстраполятора подключен к входу первого блока задержки, выход второго сумматора - в второму входу третьего сумматора, выход модели прямого канала - к второму входу первого сумматора, выход которого соединен с входом второго масштабирующего блока, выход задатчика подключен к второму входу измерителя рассогласования.
При работе этой системы управления регулирующим блоком вырабатывается в натурно-модельном контуре с моделью объекта, включающей четвертый сумматор, модель прямого канала, первый масштабирующий блок и второй блок задержки, управляющее воздействие, которое экстраполируется с помощью экстраполятора на текущий момент времени. Отрицательное влияние рецикла (положительной обратной связи в объекте) компенсируется с помощью модели рецикла, составленной из второго масштабирующего блока и второго блока задержки.
Недостаток известной системы регулирования заключается в ее ограниченных функциональных возможностях, так как она работоспособна только в том случае, когда ресурс регулирования по прямому каналу объекта не ограничен, то есть физически реализуемы и технологически допустимы любые изменения регулирующего воздействия, которые необходимы для компенсации входных возмущающих воздействий и реализации любых изменений задающего воздействия системы.
Известна система регулирования объекта с рециклом [Патент РФ №2457528, G05B 13/02, 2011], содержащая задатчик, экстраполятор, первый блок задержки, последовательно включенные первый датчик, первый сумматор, первый блок вычитания, регулирующий блок, второй блок вычитания и модель прямого канала без запаздывания, последовательно включенные модель рецикла без запаздывания, второй блок запаздывания и третий блок вычитания, последовательно соединены исполнительный блок и объект управления, включающий третий блок запаздывания, последовательно включенные блок рецикла без запаздывания, четвертый блок запаздывания, второй блок суммирования, пятый блок запаздывания, блок прямого канала без запаздывания, причем вход объекта управления соединен через третий блок запаздывания с вторым входом второго блока суммирования, выход задатчика соединен с вторым входом первого блока вычитания, выход модели прямого канала без запаздывания - с вторым входом первого сумматора, выход экстраполятора подключен к входу исполнительного блока и через третий блок вычитания и первый блок запаздывания - к второму входу второго блока вычитания, блок деления объекта управления, последовательно включенные второй датчик, третий сумматор, блок деления и блок умножения, второй вход которого соединен с выходом регулирующего блока, а выход - с входом экстраполятора, выход первого датчика соединен с вторым входом третьего сумматора и вторым входом блока деления, выход второго датчика соединен с входом модели рецикла без запаздывания, вход блок деления объекта управления соединен с выходом блока прямого канала объекта без запаздывания, первый выход блока деления объекта управления соединен с первым выходом объекта управления, второй выход - с входом блока рецикла объекта без запаздывания и с вторым входом объекта управления, который соединен с входом второго датчика.
При работе этой системы управления в модельном контуре регулирования, состоящем из модели прямого канала без запаздывания и регулирующего блока, вырабатывается регулирующее воздействие, направленное на поддержание равенства выходного воздействия у объекта управления заданному значению. Это регулирующее воздействие пересчитывается на управляющее воздействие с учетом воздействия рецикла и экстраполируется на текущий момент времени. Наличие измерения воздействия, поступающего в рецикл, позволяет учесть его влияние, во-первых, за счет моделирования его эффекта с помощью модели рецикла без запаздывания и второго блока запаздывания и, во-вторых, путем определения и учета соотношения между выходным воздействием объекта и воздействием рецикла.
Недостаток известной системы регулирования заключается в ее ограниченных функциональных возможностях, так как она работоспособна только в том случае, когда ресурс регулирования по прямому каналу объекта не ограничен, то есть физически реализуемы и технологически допустимы любые изменения регулирующего воздействия, которые необходимы для компенсации входных возмущающих воздействий и реализации любых изменений задающего воздействия системы.
Задача изобретения - повышение функциональных возможностей системы.
Сущность изобретения состоит в том, что в систему управления, содержащую объект управления, включающий в свой состав последовательно соединенные первый блок запаздывания и блок первого канала управления, первый сумматор, последовательно соединенные делитель потока и первый датчик, последовательно соединенные первый блок рецикла объекта управления и второй блок запаздывания, второй датчик, модель объекта управления, включающую модель первого блока рецикла объекта управления, первый блок задержки, второй блок задержки, второй сумматор, последовательно соединенные первый блок вычитания, модель блока первого канала управления, третий сумматор, второй блок вычитания, регулирующий блок, последовательно соединенные экстраполятор и первый исполнительный блок, первый задатчик, причем выход блока первого канала управления подключен к первому входу первого сумматора, выход второго блока запаздывания соединен с вторым входом первого сумматора, вход второго датчика соединен с входом первого блока рецикла объекта управления, а выход второго датчика соединен с входом модели первого блока рецикла объекта управления и с вторым входом третьего сумматора, второй вход первого блока вычитания подключен к выходу регулирующего блока, второй вход второго блока вычитания соединен с выходом первого задатчика, выход первого исполнительного блока соединен с входом первого блока запаздывания, введены третий блок вычитания, последовательно соединенные второй блок рецикла объекта управления и третий блок запаздывания, последовательно соединенные обратная модель блока первого канала управления и третий блок задержки, последовательно соединенные блок вычисления модуля сигнала, фильтр низких частот, ключ, четвертый блок вычитания, второй регулирующий блок и второй исполнительный блок, последовательно соединенные второй задатчик и компаратор, третий задатчик, блок расчета коэффициентов, включающий последовательно соединенные четвертый задатчик, первый блок умножения и четвертый сумматор, пятый задатчик, последовательно соединенные шестой задатчик, пятый блок вычитания, второй блок умножения и пятый сумматор, последовательно соединенные седьмой задатчик и третий блок умножения, последовательно соединенные восьмой задатчик, четвертый блок умножения, шестой блок вычитания, интегратор, пятый блок умножения и шестой сумматор, девятый, десятый, одиннадцатый и двенадцатый задатчики, причем выход первого сумматора подключен к первому входу делителя потока и соединен с входом первого блока рецикла объекта управления, вход второго блока рецикла соединен с первым выходом делителя потока, выход третьего блока запаздывания подключен к второму входу блока первого канала управления, выход первого исполнительного блока соединен с входом второго блока задержки, выход второго исполнительного блока подключен к второму входу делителя потока, выход модели первого блока рецикла объекта управления подключен к первому входу обратной модели блока первого канала управления, вход первого блока задержки соединен с выходом обратной модели блока первого канала управления, выход первого блока задержки подключен к первому входу третьего блока вычитания, второй вход которого подключен к выходу первого регулирующего блока, выход третьего блока вычитания соединен с входом экстраполятора, выход второго блока задержки подключен к первому входу второго сумматора, второй вход которого соединен с выходом третьего блока задержки, выход второго сумматора подключен к второму входу первого блока вычитания, вход блока вычисления модуля сигнала соединен с выходом второго блока вычитания, второй вход компаратора соединен с первым входом ключа, а выход компаратора подключен к второму входу ключа, второй вход четвертого блока вычитания подключен к выходу третьего задатчика, второй вход четвертого сумматора соединен с выходом пятого задатчика, а третий вход четвертого сумматора соединен с выходом третьего блока умножения, второй вход которого соединен с выходом пятого блока умножения, выход девятого задатчика подключен к второму входу пятого сумматора, второй вход второго блока умножения подключен к выходу двенадцатого задатчика, второй вход четвертого блока умножения соединен с выходом шестого задатчика, выход десятого задатчика подключен к второму входу шестого сумматора, выход одиннадцатого задатчика соединен с вторым входом пятого блока умножения, второй вход шестого блока вычитания подключен к выходу первого датчика, второй вход пятого блока вычитания соединен с выходом второго регулирующего блока, выход четвертого сумматора подключен к второму входу первого регулирующего блока, выход пятого сумматора подключен к второму входу модели блока первого канала управления и к второму входу обратной модели блока первого канала управления, выход шестого сумматора подключен к третьему входу модели блока первого канала управления и к третьему входу обратной модели блока первого канала управления.
На фиг.1 представлена общая схема системы регулирования объекта с рециклом.
На фиг.2 представлены графики переходных процессов в системе под влиянием внешних ступенчатых воздействий по возмущающему входу ω(t).
На фиг.3 представлены графики переходных процессов в системе под влиянием внешних ступенчатых воздействий по задающему входу Y*(t).
Система содержит объект управления 1, первый блок 2 запаздывания, блок 3 первого канала управления, первый сумматор 4, делитель потока 5, второй блок 6 запаздывания, первый блок 7 рецикла объекта управления, третий блок 8 запаздывания, второй блок 9 рецикла объекта управления, второй исполнительный блок 10, первый исполнительный блок 11, второй датчик 12, первый датчик 13, модель 14 объекта управления, первый блок 15 задержки, обратную модель 16 блока первого канала управления, модель 17 первого блока рецикла объекта управления, третий блок 18 задержки, второй блок 19 задержки, второй сумматор 20, первый блок21 вычитания, модель 22 блока первого канала управления, третий сумматор 23, экстраполятор 24, третий блок 25 вычитания, первый регулирующий блок 26, второй блок 27 вычитания, первый задатчик 28, блок 29 вычисления модуля сигнала, ключ 30, фильтр 31 низких частот, второй регулирующий блок 32, четвертый блок вычитания 33, компаратор 34, второй задатчик 35, третий задатчик 36, блок 37 расчета коэффициентов, четвертый задатчик 38, первый блок 39 умножения, четвертый сумматор 40, пятый задатчик 41, пятый блок 42 вычитания, второй блок 43 умножения, пятый сумматор 44, девятый задатчик 45, шестой задатчик 46, двенадцатый задатчик 47, третий блок 48 умножения, седьмой задатчик 49, восьмой задатчик 50, шестой сумматор 51, пятый блок 52 умножения, интегратор 53, шестой блок 54 вычитания, четвертый блок 55 умножения, десятый задатчик 56, одиннадцатый задатчик 57.
Модель 17 первого блока рецикла объекта управления представлена, например, в виде апериодического звена. Обратная модель 16 блока первого канала управления представлена, например, в виде параллельно соединенных усилительного и реального дифференцирующего звеньев с регулируемыми коэффициентами. Модель 22 блока первого канала управления имеет структуру инерционного звена первого порядка с регулируемыми коэффициентами. Экстраполятор 24 и фильтр 31 низких частот реализуются, например, в виде инерционного звена первого порядка. Первый 26 и второй 32 регулирующие блоки представляют собой, например, пропорционально-интегральный регулятор в виде параллельно соединенных интегрального и усилительного звеньев. При этом первый регулирующий блок 26 имеет регулируемый коэффициент пропорциональности. В качестве примера первого 10 исполнительного блока может служить регулирующий клапан с электрическим приводом. Второй исполнительный блок представляет собой электрический исполнительный механизм, сочлененный с приводным валом делителя 5 потока.
Предлагаемая система работает следующим образом.
В модели 14 объекта управления с использованием сигнала U1(t) о фактически реализованном управляющем воздействии по первому каналу управления, поступающего с выхода первого исполнительного блока 1, и сигнала Y(t) о текущем значении регулируемого выходного воздействия объекта рассчитывается величина 

где 
Сигнал, соответствующий расчетной (модельной) величине 

где 

Этот сигнал, проходя через обратную модель 16 блока первого канала, преобразуется в сигнал 

где:






Численные значения коэффициентов 

Сигнал с выхода обратной модели 16, проходя через третий блок 18 задержки, преобразуется в сигнал 

В модельном контуре регулирования, состоящем из первого 21 и второго 27 блоков вычитания, модели 22 блока первого канала управления, третьего сумматора 23 и регулирующего блока 26, на выходе регулирующего блока 26 формируется сигнал эквивалентного управляющего входного воздействия по первому каналу управления, которое будучи реализованным в момент времени (t-τ1) обеспечило бы в текущий момент времени t для объекта управления без цепи рецикла равенство выходного воздействия Y(t) заданному значению Y*(t), сигнал о котором поступает с выхода первого задатчика 28 на второй вход второго блока 27 вычитания. В третьем блоке 25 вычитания из этого сигнала вычитается та часть его изменений 
В результате с выхода третьего блока 25 вычитания на вход экстраполятора 24 поступает сигнал 

В экстраполяторе 24 сигнал 

При воздействии на рассматриваемую систему ограниченных по абсолютной величине внешних воздействий по возмущающему ω(t) и задающему Y*(t) входам, когда требуемое качество регулирования Y(t) обеспечивается управлением только по координатному управляющему входу объекта управления, параметрическое управляющее воздействие U2(t) фиксируется на базовом значении U* 2, устанавливающем делитель 5 потока (регулирующий орган) в положение, соответствующее базовой величине α* доли готового продукта, возвращаемого в объект управления по цепи рецикла. При этом текущие значения параметров блока 3 первого канала управления остаются неизменными и равными базовым значениям 

Контроль за выполнением условия ограниченности внешних воздействий осуществляется путем расчета текущего значения критерия качества регулирования и сопоставления его с заданными ограничениями. В данном случае критерием качества регулирования служит среднемодульная ошибка Ecp(t) регулирования, рассчитываемая путем усреднения на заданном интервале времени Tcp с использованием фильтра 31 низких частот сигнала |ε(t)| модуля текущей ошибки регулирования, поступающего с выхода блока 29 вычисления модуля сигнала, на вход которого подается с выхода второго блока 27 вычитания сигнал о текущей ошибке регулирования ε(t)=Y*(t)-Y(t). Таким образом, на выходе фильтра 31 низких частот формируется сигнал Ecp(t), формируемый в соответствии с выражением:

где Тф - постоянная времени инерционного звена первого порядка, численное значение которой выбирается из условия Tcp=2,5 Тф.
Сигнал Ecp(t) с выхода фильтра 31 низких частот поступает через ключ 30 на первый вход четвертого блока 33 вычитания и на второй вход компаратора 34, на первый вход которого с выхода второго задатчика 35 подается сигнал заданного ограничения 


Управляющий сигнал 




Однако ограничения технологического характера (обеспечение баланса входных и выходных материальных потоков объекта управления при ограниченной емкости реакционной зоны объекта, ограничения со стороны смежных по технологической цепи объектов и т.д.) не допускают длительное включение в работу контура параметрического управления. Поэтому, как только система выходит на новый режим и начинают выполняться условия ограниченности внешних воздействий 
Таким образом, прекращается работа контура параметрического управления и восстанавливается базовый режим по рециклу. Текущие значения параметров блока 3 первого канала управления возвращаются к базовым значениям 


В блоке 37 расчета коэффициентов выполняется расчет текущих значений коэффициентов

Расчет текущих значений коэффициентов

На выходах девятого 45 и десятого 56 задатчиков формируются сигналы базовых значений коэффициентов моделей 

Расчет текущих значений коэффициентов

При расчете текущих значений коэффициента






При расчете текущих значений коэффициента 






Расчет текущих значений коэффициента пропорциональности K1p(t) первого регулирующего блока 26 реализуется с использованием четвертого 38, пятого 41 и седьмого 49 задатчиков, первого 39 и третьего 48 блоков умножения и четвертого сумматора 40.
На выходе пятого задатчика 41 формируется сигнал 


В третьем блоке 48 умножения сигнал 



поступающий на второй вход первого регулирующего блока 26.
Таким образом, при воздействии на рассматриваемую систему ограниченных по абсолютной величине внешних воздействий по возмущающему и задающему входам регулирование технологического процесса осуществляется только путем корректировок текущих значений координатного управляющего входного воздействия U1(t) объекта управления. Параметрическое управляющее воздействие U2(t) фиксируется на базовом значении 
При существенных изменениях технологического режима объекта управления, что сопутствует возникновению достаточно больших по абсолютной величине внешних воздействий по возмущающему и (или) задающему входам системы, дополнительно формируются изменения параметрического управляющего входного воздействия U2(t) объекта управления, определяющего величину расхода готового продукта, возвращаемого в объект управления по цепи рецикла. За счет этого увеличивается коэффициент усиления и сокращается постоянная времени инерции первого (координатного) канала управления. Системой выполняется соответствующая корректировка коэффициентов моделей канала преобразований координатных управляющих воздействий и первого регулирующего блока, используемых в контуре координатного управления. В результате уменьшается время переходных процессов в контуре координатного управления при компенсации значительных внешних возмущающих воздействий и реализации больших изменений задающего воздействия. Тем самым достигается улучшение качества регулирования в переходные периоды при существенных изменениях технологического режима объекта управления.
По окончании переходного процесса при смене технологического режима объекта управления прекращается работа контура параметрического управления и восстанавливается базовый расход в цепи рецикла. Текущие значения параметров первого (координатного) канала управления возвращаются к базовым значениям. Восстанавливаются базовые значения коэффициентов моделей канала преобразований координатных управляющих воздействий и первого регулирующего блока, используемых в контуре координатного управления.
Приведенное выше описание работы предлагаемой системы регулирования иллюстрируется ниже результатами испытаний системы автоматического регулирования плотности магнетитовой суспензии при обогащении рядового угля на тяжелосредных гидроциклонах. Регулируемой выходной величиной Y объекта управления является плотность рабочей магнетитовой суспензии, измеряемая в кг/м3, подаваемой из схемы приготовления суспензии на тяжелосредные гидроциклоны. Часть рабочей суспензии возвращается по схеме циркуляции назад в схему приготовления.
Координатное управляющее входное воздействие U1(t) представляет собой расход в 
Испытания системы автоматического регулирования плотности магнетитовой суспензии проводились при следующих условиях:
1) общее представление динамики объекта по каналам управления и преобразования внешних воздействий соответствует рассмотренным выше формулам (1-11) при численных значениях параметров:

2) численные значения коэффициентов модели канала преобразования координатного управляющего воздействия и в модели канала преобразования изменений расхода в цепи рецикла объекта управления:

3) численные значения коэффициентов а 1 и а 2 пересчета изменений значений технологических переменных в изменения параметров канала преобразования координатного управляющего воздействия определяются по результатам численных экспериментов с использованием баланса входных и выходных материальных потоков объекта управления в соответствии с качественно-количественной схемой технологического комплекса тяжелосредных гидроциклонов;
4) первым 26 и вторым 32 регулирующими блоками реализуется стандартный пропорционально-интегральный регулятор, базовые значения настроечных коэффициентов которого выбирались по типовым методикам, а численные значения коэффициентов b1 и b2 пересчета изменений значений параметров модели канала преобразования координатного управляющего воздействия в изменения коэффициента пропорциональности K1p(t) первого регулирующего блока 26 определялись с использованием поисковых процедур.
Работа системы иллюстрируется графиками переходных процессов под влиянием внешних ступенчатых воздействий по задающему входу Y*(t) (фиг.2) и по возмущающему входу ω(t) (фиг.3). Сопоставляются следующие три варианта структуры системы.
Вариант 1. При работе системы задействован только контур координатного управления. Второй регулирующий блок 32 в контуре параметрического управления выключен, и положение делителя потока 5 не меняется, т.е. a(t)=α*=const. Блок 37 расчета коэффициентов выключен, и коэффициенты моделей канала преобразований координатных управляющих воздействий и первого регулирующего блока, используемые в контуре координатного управления, не корректируются.
Вариант 2. При работе системы задействованы как контур координатного управления, так и контур параметрического управления. Блок 37 расчета коэффициентов выключен, и коэффициенты моделей канала преобразований координатных управляющих воздействий и первого регулирующего блока, используемые в контуре координатного управления, не корректируются.
Вариант 3. При работе системы задействованы контуры координатного управления и параметрического управления. В блоке 37 расчета коэффициентов выполняется корректировка текущих значений коэффициентов моделей канала преобразований координатных управляющих воздействий и первого регулирующего блока, используемые в контуре координатного управления, в соответствии с изменениями Qr(t) под влиянием изменений α(t).
Из графиков фиг.2 и фиг.3 видно, что введение в действие контура параметрического управления (вариант 2) в дополнение к контуру координатного управления (вариант 1) обеспечивает уменьшение длительности переходных процессов и снижение величины динамического отклонения регулируемой выходной переменной от задания под влиянием управляющих воздействий. Введение в действие блока 37 расчета коэффициентов и выполнение корректировки текущих значений коэффициентов моделей канала преобразований координатных управляющих воздействий и первого регулирующего блока, используемых в контуре координатного управления (вариант 3), приводит к дополнительному уменьшению длительности переходных процессов и величины динамического отклонения регулируемой выходной переменной. Сопоставление величины среднемодульной ошибки регулирования для рассмотренных вариантов испытаний представлены в таблице 1.
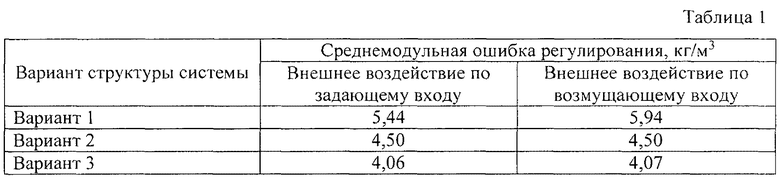
Из представленных результатов следует, что введение в систему контура параметрического управления в дополнение к контуру координатного управления с корректировкой текущих значений коэффициентов моделей регулирующего блока, используемых в контуре координатного управления, приводит к улучшению качества регулирования не менее чем на 25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| СИСТЕМА ИДЕНТИФИКАЦИИ ОБЪЕКТОВ УПРАВЛЕНИЯ | 2012 |
|
RU2486563C1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| РЕГУЛЯТОР | 2011 |
|
RU2448354C1 |
| РЕГУЛЯТОР | 1990 |
|
RU2015520C1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ | 2002 |
|
RU2251721C2 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |

Изобретение относится к автоматическому управлению. Технический результат - расширение функциональных возможностей и обеспечение работоспособности системы регулирования объекта с рециклом при смене режимов технологического процесса. Это достигается тем, что в систему регулирования для объектов с рециклом, содержащую объект управления, последовательно соединенные делитель потока и первый датчик, последовательно соединенные первый блок рецикла объекта управления и второй блок запаздывания, второй датчик, модель объекта управления, включающую последовательно соединенные первый блок вычитания, модель блока первого канала управления, третий сумматор, второй блок вычитания, регулирующий блок, последовательно соединенные экстраполятор и первый исполнительный блок, первый задатчик, введены третий блок вычитания, последовательно соединенные второй блок рецикла объекта управления и третий блок запаздывания, последовательно соединенные обратная модель блока первого канала управления и третий блок задержки, последовательно соединенные блок вычисления модуля сигнала, фильтр низких частот, ключ, четвертый блок вычитания, второй регулирующий блок и второй исполнительный блок, последовательно соединенные второй задатчик и компаратор, третий задатчик, блок расчета коэффициентов, включающий последовательно соединенные четвертый задатчик, первый блок умножения и четвертый сумматор, пятый задатчик, последовательно соединенные шестой задатчик, пятый блок вычитания, второй блок умножения и пятый сумматор, последовательно соединенные седьмой задатчик и третий блок умножения, последовательно соединенные восьмой задатчик, четвертый блок умножения, шестой блок вычитания, интегратор, пятый блок умножения и шестой сумматор, девятый-двенадцатый задатчики. 3 ил., 1 табл.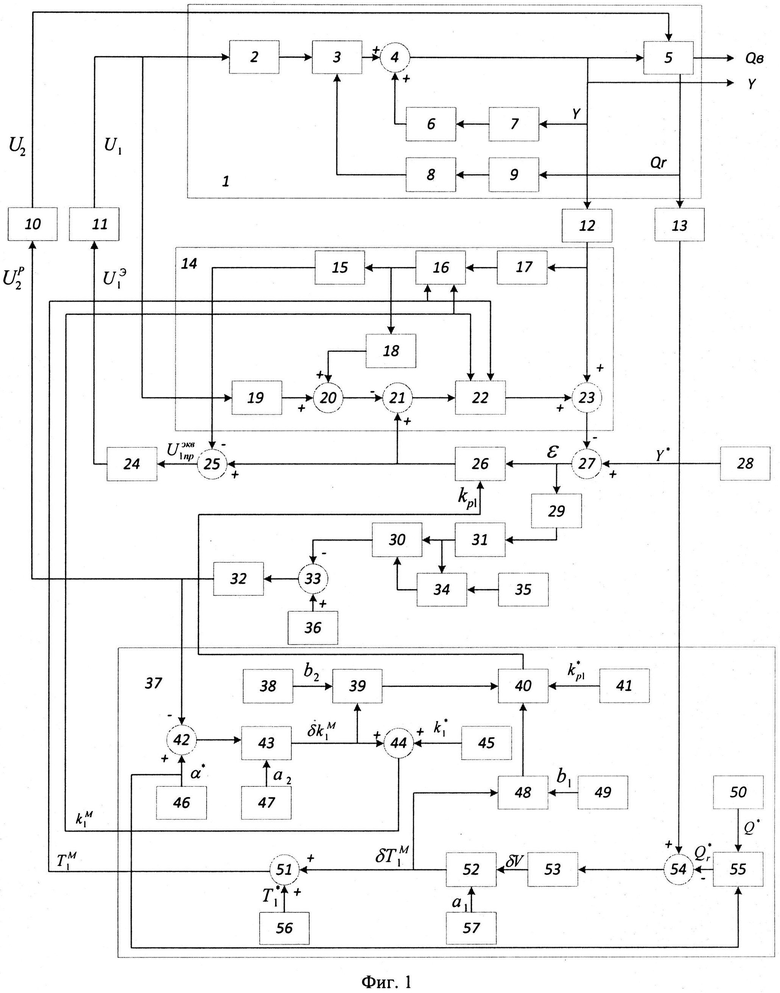
Система регулирования объекта с рециклом, содержащая объект управления, включающий в свой состав последовательно соединенные первый блок запаздывания и блок первого канала управления, первый сумматор, последовательно соединенные делитель потока и первый датчик, последовательно соединенные первый блок рецикла объекта управления и второй блок запаздывания, второй датчик, модель объекта управления, включающую модель первого блока рецикла объекта управления, первый блок задержки, второй блок задержки, второй сумматор, последовательно соединенные первый блок вычитания, модель блока первого канала управления, третий сумматор, второй блок вычитания, регулирующий блок, последовательно соединенные экстраполятор и первый исполнительный блок, первый задатчик, причем выход блока первого канала управления подключен к первому входу первого сумматора, выход второго блока запаздывания соединен с вторым входом первого сумматора, вход второго датчика соединен с входом первого блока рецикла объекта управления, а выход второго датчика соединен с входом модели первого блока рецикла объекта управления и с вторым входом третьего сумматора, второй вход первого блока вычитания подключен к выходу регулирующего блока, второй вход второго блока вычитания соединен с выходом первого задатчика, выход первого исполнительного блока соединен с входом первого блока запаздывания, отличающаяся тем, что в нее дополнительно включены третий блок вычитания, последовательно соединенные второй блок рецикла объекта управления и третий блок запаздывания, последовательно соединенные обратная модель блока первого канала управления и третий блок задержки, последовательно соединенные блок вычисления модуля сигнала, фильтр низких частот, ключ, четвертый блок вычитания, второй регулирующий блок и второй исполнительный блок, последовательно соединенные второй задатчик и компаратор, третий задатчик, блок расчета коэффициентов, включающий последовательно соединенные четвертый задатчик, первый блок умножения и четвертый сумматор, пятый задатчик, последовательно соединенные шестой задатчик, пятый блок вычитания, второй блок умножения и пятый сумматор, последовательно соединенные седьмой задатчик и третий блок умножения, последовательно соединенные восьмой задатчик, четвертый блок умножения, шестой блок вычитания, интегратор, пятый блок умножения и шестой сумматор, девятый десятый, одиннадцатый и двенадцатый задатчики, причем выход первого сумматора подключен к первому входу делителя потока и соединен с входом первого блока рецикла объекта управления, вход второго блока рецикла соединен с первым выходом делителя потока, выход третьего блока запаздывания подключен к второму входу блока первого канала управления, выход первого исполнительного блока соединен с входом второго блока задержки, выход второго исполнительного блока подключен к второму входу делителя потока, выход модели первого блока рецикла объекта управления подключен к первому входу обратной модели блока первого канала управления, вход первого блока задержки соединен с выходом обратной модели блока первого канала управления, выход первого блока задержки подключен к первому входу третьего блока вычитания, второй вход которого подключен к выходу первого регулирующего блока, выход третьего блока вычитания соединен с входом экстраполятора, выход второго блока задержки подключен к первому входу второго сумматора, второй вход которого соединен с выходом третьего блока задержки, выход второго сумматора подключен к второму входу первого блока вычитания, вход блока вычисления модуля сигнала соединен с выходом второго блока вычитания, второй вход компаратора соединен с первым входом ключа, а выход компаратора подключен к второму входу ключа, второй вход четвертого блока вычитания подключен к выходу третьего задатчика, второй вход четвертого сумматора соединен с выходом пятого задатчика, а третий вход четвертого сумматора соединен с выходом третьего блока умножения, второй вход которого соединен с выходом пятого блока умножения, выход девятого задатчика подключен к второму входу пятого сумматора, второй вход второго блока умножения подключен к выходу двенадцатого задатчика, второй вход четвертого блока умножения соединен с выходом восьмого задатчика, выход десятого задатчика подключен к второму входу шестого сумматора, выход одиннадцатого задатчика соединен с вторым входом пятого блока умножения, второй вход шестого блока вычитания подключен к выходу первого датчика, второй вход пятого блока вычитания соединен с выходом второго регулирующего блока, выход четвертого сумматора подключен к второму входу первого регулирующего блока, выход пятого сумматора подключен к второму входу модели блока первого канала управления и к второму входу обратной модели блока первого канала управления, выход шестого сумматора подключен к третьему входу модели блока первого канала управления и к третьему входу обратной модели блока первого канала управления.
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 1994 |
|
RU2108612C1 |
| EA 201200846 A1, 30.01.2013 | |||
| WO 2001018525 A2, 15.03.2001 | |||

