1
Изобретение относится к обогащению полезных ископаемых и может быть использовано на обогатительных фабриках черной металлургии.
Цель изобретения - повышение точности управления за счет обеспечения в широком диапазоне компенсации влияния возмущающих воздействий на процесс.
На чертеже представлена блок-схема данного устройства.
Устройство включает датчик 1 содержания железа в исходном питании, датчик 2 расхода исходного питания (руды), датчик 3 расхода воды в процесс, датчик 4 напряженности магнитного поля, блоки 5 и 6 расчета прогнозируемых значений содержания железа соответственно в промпродукте и в хвостах, датчик 7 содержания железа в хвостах, датчик 8 содержания железа в промпродукте, которые соответственно соединены с первыми входами первого и второго элементов 9 и 10 сравнения, экстраполятор 11 содержания железа в исходном питании, экстраполяторы 12 и 13 величин возмущений, наложенных на содержание железа соответственно в хвостах и промпродукте, блок 14 расчета ожидаемых величин содержания железа в промпродукте и в хвостах, последовательно соединенные сумматор 15, блок 16 вычисления себестоимости пром- продукта, корректор 17, первый выход которого соединен с первым входом блока 14, а второй выход корректора 17 подключен соответственно к регулятору 18 расхода исходного питания, регулятору 19 расхода воды в процесс и к регулятору 20 напряженности магнитного поля, выход элемента 9 сравнения через экстраполятор 12 соединен с первым входом сумматора 15, выход элемента 10 сравнения через экстраполятор 13 соединен с вторым входом сумматора 15. Датчик 1 соединен с входом экстраполятора 11, выход которого соединен с вторым входом блока 14, выход которого соединен с третьим входом сумматора 15. Датчик 1 также соединен с первыми входами блоков 5 и 6, выходы которых соответственно подключены к первому и второму элементам 9 и 10 сравнения. Датчики 2, 3, 4 подключены к вторым, третьим и четвертым входам блоков 5 и 6.
В качестве датчика 1, датчиков 7 и 8 используется анализатор СРМ-13, в качестве датчика 2 - электронно-гидравлические весы ЭГВ, датчика 3 - диафрагма в комплекте с дифманометром; датчика 4 - дифференциально-трансформационный дат- чик, механически связанный с подвижными магнитными полюсами сепаратора (на чертеже не показаны).
Модели технологического процесса в блоках 5 и 6 представлены уравнениями
0Др„(0 &|С&-тР))+
+ &з/Г(-т„)(1)
Av)C,) Н-Сз// /-в.)(2)
где Q, Qib Я - фактические величины рас- 5ходов исходного питания,
воды и напряженности магнитного поля соответственно;
Др„(/) AV() приращения содержаний 0железа в промпродукте и в
хвостах, вызванные изменениями управляющих воздействий;
ТР, тв, тн - эквивалентные запаздывания в соответствующих ха- 5налах управления;
Ь,Ь2,Ьз,С,С2,Сз - коэффициенты.
В соответствии с уравнениями (1) и (2) блоки 5 и 6 реализуются с использованием элементов задержки и сумматоров, например, с использованием процессорного 0 устройства КР580ИК80А.
В блоке 14 производится расчет ожидаемых величин содержаний железа в промпродукте и в хвостах без учета неконтролируемых возмущений в соответствии с выражениями
5 рр((&0+&20()+ зЯ|ЧО+сМО (3)
где Qif, Q , Нр - рассчитанные в корректоре значения управляющих воздействий;
0(/) - экстраполированное на момент времени значение содержания железа в исходном питании.
Блок 14 реализуется с помощью сумматора (КР580ИК80А).
5Критерий оптимизации (себестоимость
концентрата) рассчитывается по формуле F f0+f QЈ+f2QZ+f3Hp+f40 +f5w+ -(4)
Где /о, fi, .., /е - коэффициенты, учитывающие цены материальных ресурсов и их удельные затраты;
фр, pv - сигналы, пропорциональные неконтролируемым возмущениям, наложенным на содержания железа в пром- продукте и в хвостах.
Блок 16 реализуется с помощью сум- матора (КР580ИК80А).
В корректоре 17 рассчитываются значения управляющих воздействий. При использовании аналоговых сигналов с помощью серийного экстремального регулятора ЭРБ-4 при использовании цифровых сиг- налов с помощью процессорного устройства КР580ИК80А.
Схемы экстраполяторов 12 и 13 аналогичны. Функциональная схема (не показана) экстраполятора включает в себя эле- менты задержки на фиксированное время то,2то,3то..., где время т0 обычно соответствует интервалу дискретности контроля, усилители с коэффициентами ап,а,а,..., и сумматор. Таким образом, экстраполяция (прогнозирование) значений сигналов осу- ществляется с помощью авторегрессионных моделей вида:
V
p(«)2ja,p(rc-i),
где п - момент дискретного времени.
Устройство работает следующим образом. Сигналы с датчика 1 содержания железа в исходном питании, датчиков 2, 3, 4 поступают на входы блоков 5 и 6, представляющих собой модели технологического процесса. Сигнал на выходе блока 5 соот- ветствует приращению содержания железа в промпродукте. обусловленному изменениями расходов исходного питания воды и напряженности магнитного поля. Сигнал на выходе блока 6 соответствует приращению содержа- ния железа в хвостах, обусловленному изменениями расходов исходного питания, воды и напряженности поля. Сигнал с выхода блока 5 сравнивается в элементе 0 сравнения с сигналом, поступавшим с датчика 7 содержания железа в промпродук- те. Сигнал на выходе элемента 10 сравнения, являющийся разностью между прогно- зируемым и фактическим значениями содержания железа в промпродукте, пропорционален значению возмущения, наложенному на содержание железа в промпро- дукте. Сигнал с выхода блока 6 сравнивается в элементе 9 сравнения с сигналом, поступившим с датчика содержания железа в хвостах. Сигнал на выходе элемента 9 сравнения пропорционален значению возмущения, наложенному на содержание железа в хвостах. Сигнал с выхода датчика 1 содержания железа в исходном питании поступает на вход экстраполятора 11, с выхода элемента 9 сравненияi-.a i.- ч
экстраполятора 12, с выхо а« элемента . - сравнения - на вход зксграполятора Л На выходе экстраполяк..рн П ,0| сигнал, пропорциональный лрогнозпри MOV значению содер/лания железа ь исходном питании, на выходе эксграиоляторов ili и о получаются сигналы, чроиорциог.альпыо неконтролируемым возмущениям, наложенным на содержание железа в промпродукте и хвостах соответственно. В блоке 14 по сигналу с выхода экстраполятора 11 и сигналу, поступившему с автоматического корректора 17, рассчитываются ожидаемые значения содержания железа в промпродукте и в хвостах без учета значений неконтролируемых возмущений, наложенных на содержание железа в промпродукте и в хвостах. В блоке сумматора 15 рассчитываются ожидаемые значения содержаний железа в проо- продукте и в хвостах с учетом прогнозируемых значений неконтролируемых возмущений. В блоке 16 по ожидаемым значениям содержаний железа в промпрод кте и в хвостах и сигналам, поступившим с автоматического корректора, рассчитываются значения критерия оптимизации. В корректоре 17 рассчитываются значения оптимальных управляющих воздействий. Оптимальные значения управляющих воздействии, обеспечивающие максимальное значение критерия, являются новыми заданиями для регуляторов 18, 19, 20 расходов исходного питания, воды и напряженности ,оля.
Благодаря введенным блокам и связям учитывается влияние неконтролируемых возмущающих воздействий на технологический процесс, что повышает точность управления. Кроме того, поиск оптимального технологического режима на объекте заменяется поиском на модели. Это позволяет исключить потери на поиск и тем самым повысить качество управления. Потери на поиск оценены путем имитационного моделирования системы управления. Исключение этих потерь приводит к увеличению производительности по концентрату на 2,5%
Формула изобретения Устройство для автоматического управления процессом магнитного обогащения железных руд, содержащее датчики содержания железа в промпродукте и в хвостах, регулятор расхода воды в процесс и регулятор напряженности магнитного поля, отличающееся тем, что, с целью повышения точности управления за счет обеспечения в широком диапазоне компенсации влияния возмущающих воздействий на процесс, оно снабжено датчиками расхода исходною питания и воды в процесс, содержания железа в исходном питании, датчиком напряженности магнитного поля, блоками расчета прогнозируемых величии содержания железа в промиродукте п хвостах, двумя
элементами сравнения, экстраполятором содержания железа в исходном питании, экст- раполяторами возмущений, наложенных на содержание железа в промпродукте и в хвостах, блоком расчета ожидаемых величин содержания железа в промпродукте и в хвостах, регулятором расхода исходного питания в процесс, последовательно соединенными сумматором, блоком вычисления себестоимости промпродукта, корректором, первый выход которого соединен с первым входом блока расчета ожидаемых величин содержания железа в промпродукте, а второй выход корректора подключен соответствен- но к регуляторам рас.хода исходного питания, воды в процесс и регулятору напряженности магнитного поля, причем выход датчика содержания железа в хвостах соединен с первым входом первого элемента сравнения, выход которого через экстра- полятор величин возмущений, наложенных на содержание железа в хвостах, соединен с первым входом сумматора, выход
датчика содержания железа в промпродукте соединен с первым входом второго элемента сравнения, выход которого через экстраполятор величин возмущений, наложенных на содержание железа в промпродукте, соединен с вторым входом сумматора, а выход датчика содержания железа в исходном питании подключен к первым входам блоков расчета прогнозируемых веQ личин содержаний железа в промпродукте и в хвостах и к второму входу блока расчета ожидаемых величин содержания железа в промпродукте, выход которого соединен с третьим входом сумматора, при этом датчики расхода исходного питания воды в процесс и датчик напряженности магнитного поля соответственно соединены с вторыми, третьими и четвертыми входами блоков расчета прогнозируемых величин содержания железа в промпродукте и в хвостах, выходы каждого из которых подключены к вторым входам первого и второго элементов сравнения.
5
0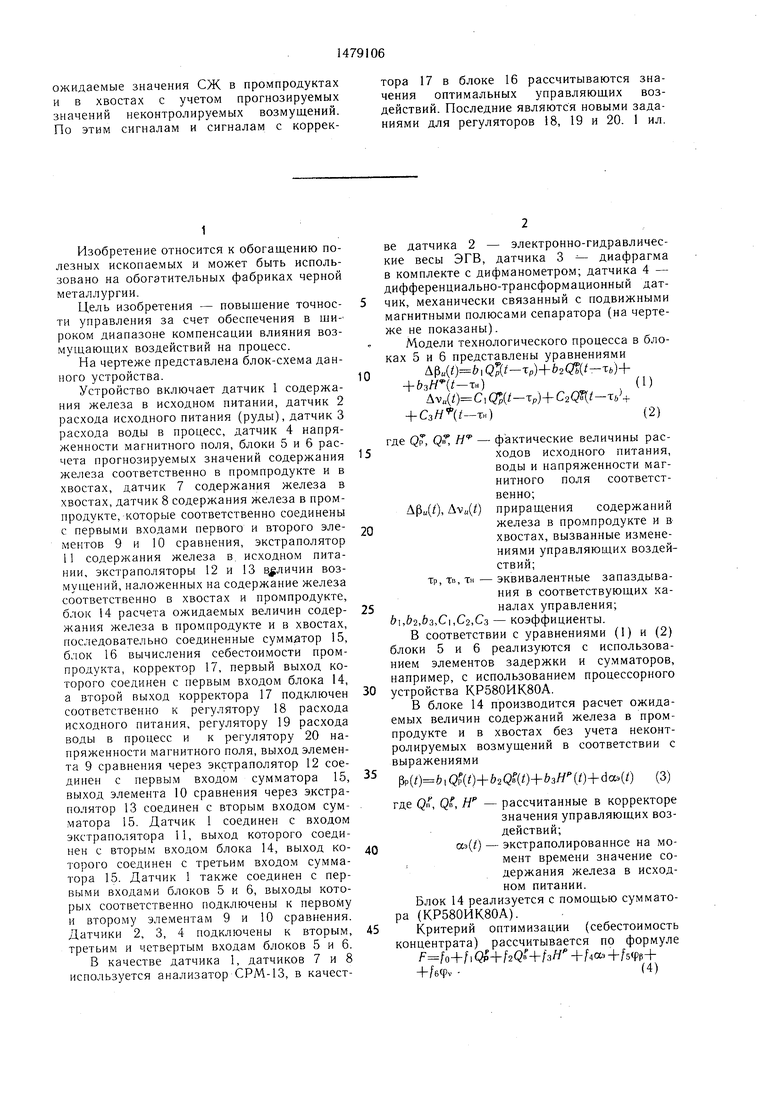
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Устройство для автоматического регулирования процесса сухой магнитной сепарации | 1983 |
|
SU1121041A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ МАТЕРИАЛА | 2001 |
|
RU2204438C1 |
| Способ автоматического управления процессом магнитной сепарации | 1981 |
|
SU1039568A1 |
| Система регулирования объектов высокого порядка с запаздыванием | 1989 |
|
SU1667002A1 |
| Адаптивная система управления агломерационной установкой | 1981 |
|
SU1125604A1 |
| Способ автоматического регулирования процесса магнитной сепарации | 1981 |
|
SU1076144A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
Изобретение относится к обогащению полезных ископаемых и может быть использовано на обогатительных фабриках черной металлургии. Цель - повышение точности управления процессом обогащения за счет обоеспечения в широком диапазоне компенсации влияния возмущающих воздействий на процесс. Устройство содержит датчики 7,8 и 1 содержания железа (СЖ) в пром-продукте в хвостах 8 и в исходном питании(ИП) соответственно, датчики 2,3 и 4 и воды в процесс и напряженности магнитного поля соответственно регуляторы 14,20 и 18 расхода воды в процесс, напряженности магнитного поля и расхода ИП в процесс соответственно. Сигналы с датчиков 1-4 поступают на входы блоков 5 и 6 расчета прогнозируемых значений СЖ соответственно в промпродукте и в хвостах. Сигнал с блока 5 сравнивается в элементе 10 сравнения с сигналом с датчика 7. Выходной сигнал с элемента 10 пропорционален значению возмущения, наложенному на СЖ в промпродукте. Сигнал с выхода блока 6 сравнивается в элементе 9 сравнения с сигналом, поступившим с датчика 8 СЖ в хвостах. Сигнал на выходе элемента 9 пропорционален значению возмущения, наложенному на СЖ в хвостах. Сигналы с датчика 1 и с элементом 9 и 10 поступают соответственно на входы экстраполяторов (ЭП) 11,12,и 13. По сигналу с выхода ЭП 11 и сигналу, поступившему с корректора 17, в блоке 14 рассчитываются ожидаемые значения СЖ в промпродукте и в хвостах без учета значений неконтролируемых возмущений. Сигналы с выходов блока 14 и ЭП 12 и13 поступают в блок 15, где рассчитываются ожидаемые значения СЖ в промпродуктах и в хвостах с учетом прогнозируемых значений неконтролируемых возмущений. По этим сигналам и сигналам с корректора 17 в блоке 16 рассчитываются значения оптимальных управляющих воздействий. Последние являются новыми заданиями для регуляторов 18,19 и 20. 1 ил.
| Троп А | |||
| Е | |||
| и др | |||
| Автоматическое управление технологическими процессами обогатительных фабрик | |||
| М.: Недра, 1986, с | |||
| Заслонка для русской печи | 1919 |
|
SU145A1 |
| Устройство для автоматического регулирования процесса магнитной сепарации | 1982 |
|
SU1044332A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
