Изобретение относится к земл.ерой- ному машиностроению, а именно к приводам роторных экскаваторов
Целью изобретения является повыше- н ле надежности работы за счет снижения динамических усилий в металлоконструкциях,,.
На фиг.1 представлена блок-схема
предлагаемого устройства в положении соответствующем номинальному режиму р|аботы экскаватора; на фиг. 2 - гра- ф|ики изменения усилия в опоре хвосто- редуктора о
Роторный экскаватор содержит стре- ф- 1 с подвеской 2, ротор 3 с приво- 4 и редуктором 5 установленным 4а валу 6 ротора, верхнюю 7 и нижнюю 4 группь, пружин, размещенные между Хвостовиком 9 редуктора и стрелой. ; Винтовой регулятор 10 с ползуном 1 установлен между стрелой и верхней Группой пружин. Корпуса верхнего 12 и нижнего 13 гидроцилиндров, шарнир- Мо соединены со стрелой, а шток 14 нижнего гидроцилиндра шарнирно связан с хвостовиком редуктора. Регулируемое гидравлическое сопротивление 15 устроено в трубопровод 16, соединяющий между собой щтоковзпо и поршневую полости нижнего гидроцилиндра. Подвижно посаженная на шток 17 верхнего гидрогдалиндра направляющая втулка 18 шарнирно связана с хвостовиком .редуктора. Упор 19 размещен на штоке верх- него гидроцилиндра с возможностью взаимодействия с направляющей втулкой. Между штоком верхнего гидроцилиндра и его корпусом установлена возвратная пружина 20. Обратный кла- пан 21 включен последовательно с гулируемым гидравлическим сопротивле нйем. Другой обратный клапан 22 соединяющий между собой поршневую и
5
35
;
0
30 45 5055
штоковую полости нижнего гидроцилиндра, подключен к указанным полостям в направлении, противоположном обратному клапану 21. Поришевая полость верхнего гидрощ-шиндра соединена с его штоковой полостью Ч эрез предохранительный клапан 23, Обратный клапан 24 установлен таким образом, чтобы обеспечить свободный проток жидкости из штоковой полости верхнего гидроцилиндра в поршневую его полость с Поршневые полости каждого из гидроцилиндров подключены к одному из гидроаккумуляторов 25 и 26. Группы 7,8 пружин в сочетании с гидроцилиндрами 12 и .13 .образуют опору хвостовика редуктора «
При отсутствии окруядаого усилия F,/ на ковшах ротора 3 нижняя группа
К
40
пружин нагружена частью силы Fg тяжести редуктора 5 с приводом 4, а также усилием предварительного сжатия, создаваемого верхней группой 7 пру- зкин при помощи винтового регулятора 10 с ползуном 11,
При работе экскаватора в номинальном реткиме в забое с неоднородными прочностными свойствами изменение окруйШого усилия 7 на роторе сопровождается перемещением Y хвостовика 9 редуктора и соответствующим изменением реакции F в опоре хвостовика 9 по отношению к их номинальным значениям YHOJVJ и FHOM, В номинальном и близком к нему режимах работы экскаватора жесткость опоры -хвостовика: 9 редуктора определяется суммой жесткостей верхней 7 и нижней 8 групп пружин (участок графика на фиг, 2), что способствует устойчивости процесса копания (отсутствию автоколебаний рабочего органа из-за .чрезмерной податливости конструкции)
и обеспечивает необходимую степень снижения динамических усилий в металлоконструкциях экскаватора - стреле, подвеске и топ.- при резких изменениях, нагрузки FJ, на роторе 3, Гашение коким образом, чтобы в течение второго полупериода колебаний получить задан- ную степень снижения их амплитуд. При возникновении перегрузки на
роторе, например при стопорении ралебаний хвостовика 9, возникающих при бочего органа, окружная сила F| на близости частоты изменения окружного усилия Fy- собственной частоте колебаний металлоконструкций экскаватора.
обеспечивается за счет рассеивания энергии в регулируемом гидравлическом сопротивлении 15 в те периоды времени, когда хвостовик 9 движется вниз.
роторе возрастает, и хвостовик 9 перемещается вверх, дополнительно сжи- 10 мая верхнюю группу 7 пружин и одновременно уменьшая сжатие нижней группы 8 пружин. Величина усилия предварительного сжатия группы 7 пружин выбрана таким образом, что когда нагруз- Клапан 22 при этом закрыт, и жидкость ка на рабочий орган возрастает в К через клапан 21 и регулируемом гидрав- раз, где К - заданный коэффициент лическое сопротивление 15 поступает перегрузки, происходит отрыв хвостови- из поршневой полости гидрощ-1линдра ка 9 от нижней группы 8 пружин. В ре- 13 в штоковзш. Когда хвостовик 9 дви- зультате эти пружн:иы выключаются из жется вверх, клапан 21 закрыт, и жид- 20 работы, и суммарная жесткость пруткин кость через клапан 22 свободно перете- кает из одной ;полости гидроцилиндра 13 в другую, вследствие чего этот гидроцилиндр не оказывает сопротивление указанному движению хвостовика. Данная особенность предложенного устройства позволяет снизить реакцшо в опоре хвостовика 9, а следовательно, уменьшить по сравнению с известуменьшается. Для указанного режима зависимость между перемещением у хвостовика 9 и реакцией F в опоре представлена на фиг. 2 участком BD. 25 Уменьшение жесткости опоры редуктора приводит к тому, что процесс стопоре- ния ротора растягивается во времени, и динамические усилия в металлоконструкциях экскаватора уменьшаются.
ким образом, чтобы в течение второго полупериода колебаний получить задан- ную степень снижения их амплитуд. При возникновении перегрузки на
роторе возрастает, и хвостовик 9 перемещается вверх, дополнительно сжи- мая верхнюю группу 7 пружин и одновременно уменьшая сжатие нижней группы 8 пружин. Величина усилия предварительного сжатия группы 7 пружин выбрана таким образом, что когда нагруз- ка на рабочий орган возрастает в К раз, где К - заданный коэффициент перегрузки, происходит отрыв хвостови- ка 9 от нижней группы 8 пружин. В ре- зультате эти пружн:иы выключаются из работы, и суммарная жесткость пруткин
уменьшается. Для указанного режима зависимость между перемещением у хвостовика 9 и реакцией F в опоре представлена на фиг. 2 участком BD. Уменьшение жесткости опоры редуктора приводит к тому, что процесс стопоре- ния ротора растягивается во времени, и динамические усилия в металлоконструкциях экскаватора уменьшаются.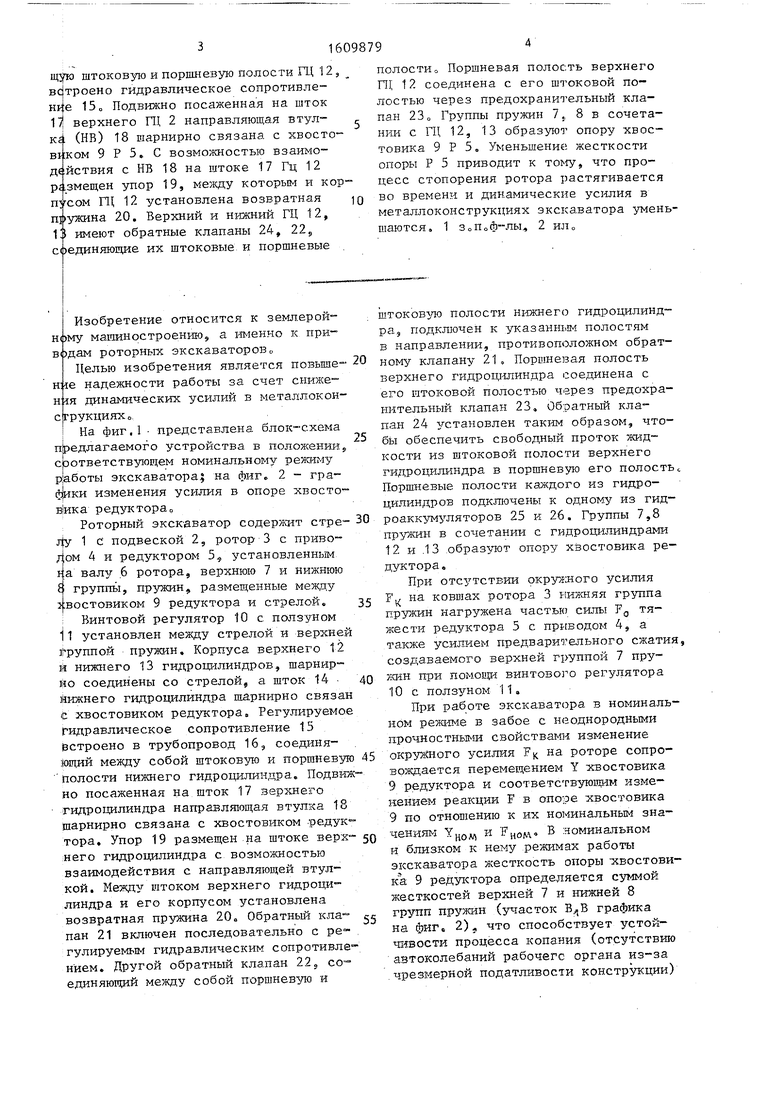
| название | год | авторы | номер документа |
|---|---|---|---|
| Упругодемпфирующая подвеска привода ротора экскаватора | 1983 |
|
SU1263755A1 |
| Подвеска стрелы рабочего органа роторного экскаватора | 1988 |
|
SU1709022A1 |
| МОЛОТ МАА ДЛЯ РАЗРУШЕНИЯ НЕГАБАРИТОВ ГОРНЫХ ПОРОД | 2002 |
|
RU2237808C2 |
| Устройство виброзащиты кабины машиниста экскаватора | 1987 |
|
SU1537774A1 |
| Роторный экскаватор | 1979 |
|
SU870595A1 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219383C2 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219386C2 |
| ГИДРОЦИЛИНДР | 2001 |
|
RU2219384C2 |
| СПОСОБ ВЗВОДА, РАЗГОНА И НАНЕСЕНИЯ УДАРА СНАРЯДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ ПРИ РАЗРУШЕНИИ РАЗЛИЧНЫХ МАТЕРИАЛОВ | 2005 |
|
RU2291298C2 |
Изобретение относится к землеройному машиностроению, а именно к приводам роторных экскаваторов. Цель - повышение надежности работы за счет снижения динамических усилий в металлоконструкциях. Роторный экскаватор включает стрелу 1 с подвеской 2, ротор 3 с приводом и редуктором /Р/ 5. Между хвостовиком 9 Р 5 и стрелой размещены верхняя и нижняя группы пружин 7,8. Корпуса верхнего и нижнего гидроцилиндров /ГЦ/ 12,13 шарнирно соединены со стрелой, а шток 14 ГЦ 12 шарнирно связан с хвостовиком 9 Р 5. В магистраль 16, соединяющую штоковую и поршневую полости ГЦ 12, встроено гидравлическое сопротивление 15. Подвижно посаженная на шток 17 верхнего ГЦ 2 направляющая втулка /НВ/ 18 шарнирно связана с хвостовиком 9 Р 5. С возможностью взаимодействия с НВ 18 на штоке 17 ГЦ 12 размещен упор 19, между которым и корпусом ГЦ 12 установлена возвратная пружина 20. Верхний и нижний ГЦ 12,13 имеют обратные клапаны 24,22, соединяющие их штоковые и поршневые полости. Поршневая полость верхнего ГЦ 12 соединена с его штоковой полостью через предохранительный клапан 23. Группы пружин 7,8 в сочетании с ГЦ 12,13 образуют опору хвостовика 9 Р 5. Уменьшение жесткости опоры Р 5 приводит к тому, что процесс стопорения ротора растягивается во времени и динамические усилия в металлоконструкциях экскаватора уменьшаются. 1 з.п.ф-лы, 2 ил.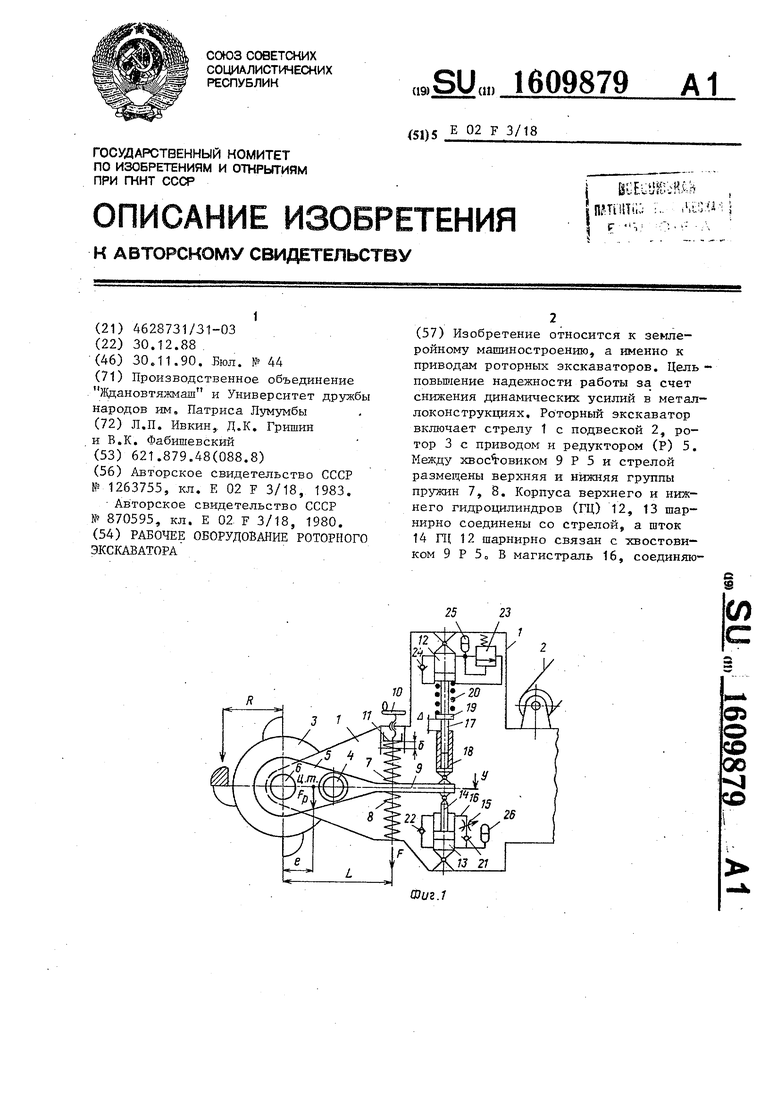
ным устройством динамические усилия, зо счет деформации упругих элементов
в течение первого полупериода колебаний происходит поглощение основной () части кинетической энергии движзпцихся масс. Остальная часть энергии, соответствуюр ая площади DEFM графика на фиг. 2, поглощается гидроцилиндром 12. При выборе зазора направляющая втулка 18 доходит до упора 19 и заставляет шток 17 гидроцилиндра 12 перемещаться вверх, в результате чего жидкость перетекает из поршневой полости гидроцилиндра 12 в штоковую через предохранительный клапан 23, что обеспечивает постоянство демпфирующего усилия со стороны гидроцилиндра 12 (участок EF характеристики на фиг. 2). Гидроаккумулятор 25 компенсирует разность объемов поршневой и штоковой полостей гидро- цилиндра 12.
По окончании перегрузки на роторе
передающиеся от ротора на металлокон- струкгщи при импульсном изменении нагрузки на рабочем органе. Объясняется это тем, что, когда под действием окружного усилия Fy. хвостовик 9 движется вверх, то на него действуют лишь упругие силы от пружин, а сила вязкого сопротивления со стороны гидро- цилиндра 13 отсутствует. В то же вре- мя в номинальном режиме работы экскаватора зазор ;, между направляющей втулкой 18 и упором 19 не выбран, вследствие чего втулка 18 свободно перемещается вдоль оси штока 17 и гидроцилиндр 1.2 также не оказывает сопротивление движению 1свостовика 9 Поскольку величина силы вязкого сопротивления гидроцилиндра пропорциональна скорости движения его штока и при резких импульсных воздействиях на ротор 3 эта; величина в извест- ,ном устройстве велика по сравнению с упругими силами пружин, то отсутствие силы вязкого сопротивления со стороны гидроцилиндров 12, 13 в течение полупериода колебаний позволяет снизить первый после приложения импульса пик динамических усилий в металлоконструкциях. Гидравлическое сопротивление 15 отрегулировано та-
40
45
50
хвостовик 9 под действием силы Fp веса и усилия сжатия группы 7 пружин опускается, и возвратная пружина 20 Отпускает шток 17 в исходное положе- 5 ние до -упора в гидроцилиндра. При ЭТОМ жидкость перетекает из штоковой полости тидроцилиндра 12 в поршневую через обратный клапан 24. Возвратная пружина 20 преодолевает в осхвостовик 9 под действием силы Fp веса и усилия сжатия группы 7 пружин опускается, и возвратная пружина 20 Отпускает шток 17 в исходное положе- ние до -упора в гидроцилиндра. При ЭТОМ жидкость перетекает из штоковой полости тидроцилиндра 12 в поршневую через обратный клапан 24. Возвратная пружина 20 преодолевает в осCJBHOM трение в уплотнениязс, Поэтому й жесткость на один-два порядка ние жесткости пружин групп 1 . 8 к мо- 4т не учитываться в расчете«
На фиг, 2 площадь треугольника CJG соответствует потенциальной энергии деформации упругих элементов опо- р4 хвостовика - редуктора известного устройства, а площадь многоугольника IQ AI.DRFH - потенциальной энергии, погло- щг.емой в предложенном устройстве, Как показывает сравнение., при равен- с ве поглощаемой энергии максимальное значение 2 усилия в опоре редзгктора в предложенном устройстве ниже максимального значения F;, усилия в известном устройстве. Следовательно5 Ч($ски€ усилия передающиеся через на стрелу, ее подвеску и другие Q м гталлоконструкции экскаватора в предложенном устройстве.ниже5 чем в изВ JCTHOM.
ф|орму,ла изобретения 25
: 1, Рабочее оборудование роторного экскаватора, включающее установлен- н|ый на стреле с подвеской ротор с п риводоМ9 имеющим редуктор с квосто- о в), связанным со стрелой верхними и нижними группами пружин и верхним
F
HOfI
и нижним гидроцилиндрамк, корпуса которых шарнирно связаны с хвостовиком редуктора, и регулируемое гидравлическое сопротивление, встроенное в магистраль, соединяющз то мелсду собой штоковую и поршневую полости нижнего гидроцилиндра5 отличающееся тем, что, с целью повышения наделсности работы за счет снижения динамических усилий в металлоконст- ру1 :циях, шток верхнего гидро1щлинд- ра снабжен направляющей подвижной втулкой, шарнирно связанной с хвостовиком редуктора, закрепленным на штоке упором, установленньм с возможностью взаимодействия с направляющей втулкой, возвратной пру :шной, размещенной между упором верхнего гидроцилиндра и его корпусом, при этом верхний и нижний гидроцилиндры снабжены обратными клапанами, соединяютцими шс щтоковые и поршневые полости, а верхний гидроцилиндр снабжен предохранительным клапаном, размещенным между поршневой и штоковой его полостями «
2д Рабочее оборудование по п 1, о т л и ч а ю щ е е с я тем, что оно снабжено винтовым регулятором с ползуном, установленным- между стрелой и верхней группой п;оулсин.
f
Уг 9 2 У
| Упругодемпфирующая подвеска привода ротора экскаватора | 1983 |
|
SU1263755A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Роторный экскаватор | 1979 |
|
SU870595A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
