(54) МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС

| название | год | авторы | номер документа |
|---|---|---|---|
| Агрегат для крутых пластов | 1983 |
|
SU1116168A1 |
| Механизированная крепь для отработки крутых пластов угля | 1979 |
|
SU899999A1 |
| Механизированная крепь для крутых пластов | 1990 |
|
SU1789725A1 |
| ОЧИСТНОЙ МЕХАНИЗИРОВАННЫЙ КОМПЛЕКС | 2001 |
|
RU2185514C1 |
| Механизированная крепь | 1988 |
|
SU1661440A1 |
| Механизированный комплекс для отработки мощных крутых угольных пластов | 1983 |
|
SU1222846A1 |
| Агрегат для крутых пластов | 1985 |
|
SU1283413A1 |
| Механизированная крепь | 1982 |
|
SU1143851A1 |
| МЕХАНИЗИРОВАННАЯ КРЕПЬ ДЛЯ КРУТЫХ ПЛАСТОВ | 2007 |
|
RU2357083C1 |
| Механизированная крепь сопряжения для спаренных лав | 1986 |
|
SU1434116A2 |
1
Изобретение относится к горному делу, а именно к механизированным крепям очистных забоев, и может быть использовано при комплексной механизации очистных работ на крутых пластах.
Известна механизированная крепь, содержащая двухстоечные секции, систему телескопических связей и базовый элемент в виде троса, закрепленного на Концевых секциях 1.
Однако во время передвижения секций этой крепи происходит накопление ошибок в их пространственном положении, что снижает производительность комплекса.
Наиболее близким к предлагаемому техническим рец1ением является механизированный комплекс, включающий установленные между направляющими балками базового элемента секции крепи, на гидростойках которых установлены пары поворотных телескопических связей, а основания связаны с базовым элементом посредством гидродомкратов передвижения 2.
Недостатком этого комплекса является наличие непрерывной цепочки телескопических связей по всей длине крепи и размещение между основаниями всех секций направляющих балок, что приводит,, в случае неточной устатовки секций в конечное положение, к интенсивному накапливанию ошибок как в направлении простирания, так и по восстанию пласта.
Цель изобретения - повыщение точности ориентации секций крепи в процессе передвижения.
10 Поставленн.ая цель достигается тем, что секции объединены в группы, а направляющие балки выполнены со скосами в сторону завала со стороны вышележащей секции и связаны с базовым элементом посредством ползунов, установленных с возможностью
15 перемещения вдоль него посредством гидродомкратов, при этом основание нижней в группе секции снабжено хомутом и опорой для взаимодействия с направляющей балкой.
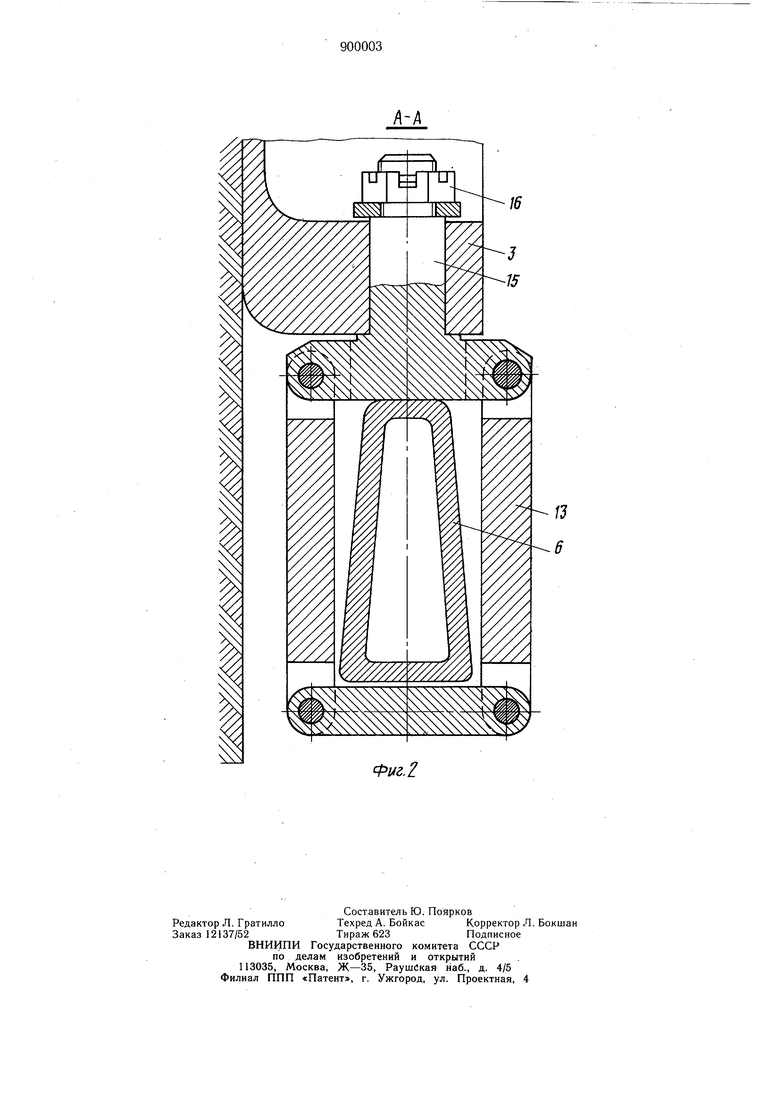
Кроме того, хомуты выполнены из щар20нирных четырехзвенников и установлены в основаниях посредством цапф с возможностью поворота вокруг оси, перпендикулярной продольной оси секции. На фиг. 1 изображен комплекс, общий вид; на фиг. 2 - сечение А-А на фиг. 1. Механизированный угольный комплекс включает механизированную крепь с однотипными секциями 1, содержащими гидростойки 2, основания 3, перекрытия 4, поворотные телескопические связи 5, щарнирно связанные с гидростойками 2, гидродомкраты 6 передвижения, установленные на основаниях 3 и связанные своими выдвижными частями с базовым элементом 7, размещенным с забойной стороны крепи. С базовым элементом подвижно связан выемочный механизм 8 посредством захватов 9. Между группами секций крепи, включающими каждая, не менее четырех секций 1, соединенных между собой телескопическими связями 5, установлены направляющие балки 10, которые связаны с базовым элементом 7 посредством ползунов 11 с гидродомкратами 12, установленными параллельно продольной оси базового элемента 7, и свободно размещены в хомутах 13, укрепленных на основаниях 3 со стороны, обращенной к нижележащим секциям. Боковые стороны 14 направляющих балок 10, обращенные к вышележащим секциям 1, имеют скосы в стороны завального ряда гидростоек 2. Хо.муты 12 выполнены в виде щарнирных четырехзвенников и снабжены цапфами 15, установленными в основаниях 3 с возможностью свободного поворота оси, пер пендикулярной продольной оси секции. От осевого перемещения цапфа 15 фиксируется крепежным элементом 16. Горизонтальное положение секции 1 на наклонной стороне 14, направляющей балки 10 обеспечивается опорой 17, укрепленной на основании 3. Комплекс работает следующим образом. Базовый элемент 7, удерживаемый от сползания хомутами 13, в которых перемещаются направляющие балки 10, передвигается домкратами 6 передвижения к забою вместе с выемочным механизмом 8 в подготовленную для него нищу путем самозарубки. При этом между наклонными боковыми сторонами 14 направляющих балок 10 и опорными поверхностями хомутов 13 и опор 17 образуются зазоры S. Все секции крепи во время передвижения базового элемента 7 расперты между боковыми породами. Вслед за передвижением работающего выемочного механизма 8 снизу вверх производится последовательное передвижение секции 1. Нижняя секция каждой группы базируется на направляющую балку 10. Все выщерасположенные от нее секции группы ориентируются на нее посредством телескопических связей 5. В случае возникновения ощибки установки какой-либо секции в конечное положение по падению пласта, например, по причине несмыкания телескопических связей 5 или отклонения секций от горизонтального положения, эти ощибки не передаются на выщележащие группы секций, а гасятся зазорами h между группами секций, т. к. отсутствующие в этих местах телескопические связи 5 не накладывают ограничений. После снятия полосы угля по всей длине лавы и передвижения всех секций крепи, выемочный- механизм 8 опускается по проделанной дороге в исходное положение, после чего очередной выемочный цикл повторяется в изложенном порядке. Для подъема крепи и базового элемента 7, в случае необходимости, производятся следующие операции. После передвижения базового элемента 7 к забою для очередного выемочного цикла производится включение нижнего концевого гидропатрона 12, который через ползун 11 поднимает на величину своего хода направляющую балку 10, выбирая зазор S. После этого гидропатрон 12 запирается гидрозамком. Затем последовательно снизу вверх передвигаются секции данной группы, копируя величину подъема направляющей балки. Все остальные группы секций поднимаются аналогичным образом. После окончания подъема всех направляющих балок 10 и секций 1 производится подъем базового элемента 7. Для этого одновременно включаются на обратный ход гидропатроны 12, которые перемещают базовый элемент 7 вверх относительно забазированных на секциях 1 направляющих балок 10. Такое выполнение механизированного комплекса позволяет исключить накопление шаговых и угловых ощибок в звеньях кинематической системы, ориентирующих крепь по восстанию пласта, а следовательно, и исключить непроизводительные затраты на устранение последствий заклинивания секций, повысить точность ориентации секций крепи относительно базового элемента. Формула изобретения 1. Механизированный комплекс, включающий установленные между направляющими балками базового элемента секции крепи, на гидростойках которых установлены парь поворотных телескопических связей, а основания связаны с базовым элементом посредством гидродомкратов передвижения, отличающийся тем, что, с целью повышения точности ориентации секций крепи в процессе передвижения, секции объединены в группы, а направляющие балки выполнены со скосами в сторону завала со стороны вышележащей секции и связаны с базовым элементом посредством ползунов, установленных с возможностью перемещения вдоль него посредством гидродомкратов, при этом основание нижней в группе секции снабжено хомутом и опорой
. ая взаимодействия с направляющей балкой.
Источники информации, принятые во внимание при экспертизе
№ 398752, кл. Е 21 D 23/00, 1972 тотип) .
16
.2
