Изобретение относится к вычислительной технике и может быть использовано при формировании эталонной информации (изображений) для корреляционно-экстремальных навигационных систем летательных аппаратов (ЛА).
Известны бортовые навигационные устройства ЛА корреляционно-экстремального типа на базе радиолокационных (например, рельефометрическая система TERCOM) и оптических (например, система конечного наведения SMAC) сенсоров - см., например, В.К. Баклицкий. «Корреляционно-экстремальные методы навигации и наведения», Тверь, ТО «Книжный клуб», 2009 г., стр.7-10 (аналоги).
Известно устройство для формирования эталонной радиолокационной карты местности для навигационных систем ЛА (патент RU №2022355), содержащее, в частности, формирователь оценки коэффициента информативности, используемый для определения пригодности участка местности для целей маршрутной навигации (конечного наведения). Данное устройство принято в качестве ближайшего аналога.
Устройство - ближайший аналог формирует эталонную карту местности на основе зонной структуры радиолокационного изображения, инвариантной к погодной и сезонной изменчивости. При этом для каждого элементарного участка местности проставляются соответствующие бинарные коды: «0» - если информативность участка ниже заданного порогового уровня, и «1» - если выше. Устройство - ближайший аналог включает блоки памяти, сумматоры, регистры, блоки сравнения группы, коммутаторы группы, блоки элементов И/ИЛИ, дешифраторы, счетчики, формирователь оценки коэффициента информативности, блоки задержки, генератор тактовых импульсов, триггер.
К недостаткам ближайшего аналога следует отнести невозможность его применения для коррекции траектории ЛА с пассивными оптико-электронными сенсорами, поскольку оценка информативности в данном устройстве осуществляется по яркостному полю, сформированному исключительно на основе радиолокационной информации об отражающих свойствах элементарных участков земной поверхности. Кроме того, реализованная в ближайшем аналоге бинарная оценка коэффициента информативности позволяет отсечь непригодные для коррекции участки местности, но не выбрать наиболее пригодные (обеспечивающие наибольшую точность привязки).
Целью предлагаемого изобретения является устранение отмеченных недостатков ближайшего аналога путем выбора наивыгоднейших (с точки зрения точности привязки) участков местности для коррекции траектории ЛА. При этом выбор осуществляется на основе анализа поля информативности (в том числе многоканального, т.е. сформированного по совокупности исходных данных: электронным топографическим картам, моделям рельефа, фото и видеоинформации и т.п.) и формирования эталонных изображений для навигационных систем ЛА как с радиолокационными, так и оптико-электронными бортовыми сенсорами.
Указанная цель достигается путем замены блока памяти на логический блок (модуль) подготовки яркостных эталонов, состоящий из блока преобразования исходных картографических данных и аэрофотоснимков (космоснимков), формирователя поля информативности (в т.ч. многоканального), блока поиска экстремумов поля информативности, блока сопоставления экстремумов поля информативности каждого из каналов, блока расчета эталонных изображений, блока буферной памяти. При этом первый выход блока преобразования исходных картографических данных соединен с входом формирователя поля информативности, второй выход блока преобразования исходных картографических данных соединен с первым входом блока сопоставления экстремумов поля информативности, выход формирователя поля информативности соединен с входом блока поиска экстремумов поля информативности, выход блока поиска экстремумов поля информативности соединен со вторым входом блока сопоставления экстремумов поля информативности, выход блока сопоставления экстремумов поля информативности соединен с входом блока расчета эталонных изображений, первый выход блока расчета эталонных изображений соединен с первым входом блока буферной памяти, второй выход блока расчета эталонных изображений соединен с входом триггера, второй вход блока буферной памяти соединен с выходом счетчика, выход блока буферной памяти соединен с входом сумматора, а формирователь оценки коэффициента информативности упразднен.
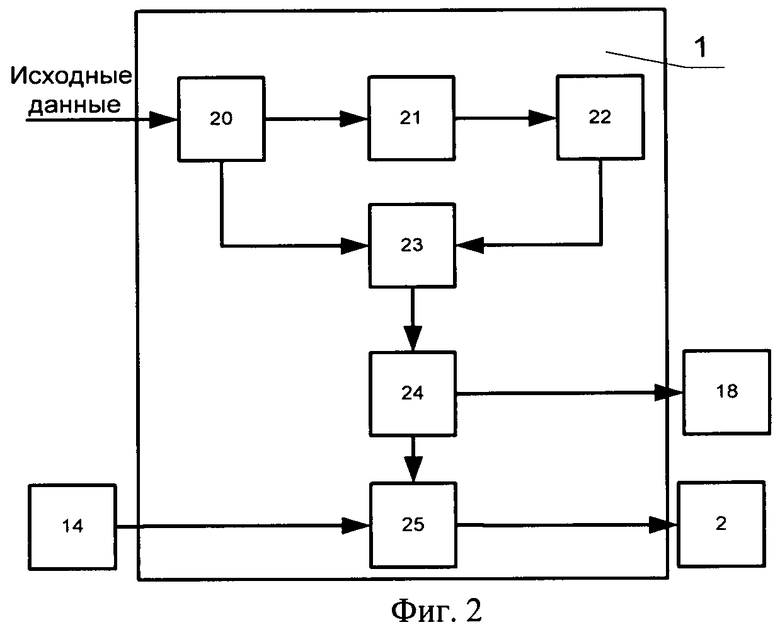
На фиг.1 представлена блок-схема заявляемого устройства, на фиг.2 - блок-схема логического блока (модуля) подготовки яркостных эталонов.
Устройство включает: логический блок 1 подготовки яркостных эталонов, сумматор 2, регистр 3, памяти 4 первой группы, памяти 5 второй группы, блоки 6 сравнения группы, коммутаторы 7 группы, блок 8 элементов ИЛИ, дешифратор 9, элемент 10 задержки, счетчик 11, сумматор 12, элемент И 13, счетчик 14, блок 15 задержки, память 16, генератор 17 тактовых импульсов, триггер 18, дешифратор 19.
Логический блок (модуль) 1 подготовки яркостных эталонов включает блок 20 преобразования исходных картографических данных в изображения, формирователь 21 поля информативности, блок 22 поиска экстремумов поля информативности, блок 23 сопоставления экстремумов поля информативности, блок 24 расчета яркостных эталонов, блок 25 буферной памяти.
Исходные данные - электронные топографические карты, модели рельефа, фото и видеоинформация (в зависимости от решаемой задачи могут присутствовать все либо только часть данных) - поступают на вход блока 20, где осуществляется их преобразование в двумерные растровые изображения с помощью известных стандартных алгоритмов. Для каждого изображения в блоке 20 формируется массив данных координатной привязки, определяющий, каким координатам на местности соответствует каждый дискрет изображения. Изображения с первого выхода блока 20 поступают в формирователь 21 поля информативности, в котором преобразуются по формуле

где Ix,y - величина поля информативности (для одного канала), bi,j - функция распределения яркости изображения, (x, y) - координаты пикселя, (w, h) - размеры информативного участка (определяются целевой задачей ЛА). Полученное поле информативности (которое может быть многоканальным при поступлении на вход блока 21 нескольких изображений) поступает в блок 22, где производится выявление экстремумов поля информативности посредством анализа частных производных многоканального поля информативности ∂I/∂x и ∂I/∂y, например, методом Ньютона (см., например, А.А.Амосов, Ю.А.Дубинский, Н.П.Копченова. «Вычислительные методы для инженеров», М.: Мир, 1998 г., стр.279-284).
Координаты найденных экстремумов с выхода блока 22 поступают в блок 23 сопоставления экстремумов поля информативности, где они пересчитываются в координаты на местности (на основании массивов данных координатной привязки - второй выход блока 20) и сопоставляются с учетом надежности исходных картографических данных, например, методом эллипсоидов (см., например, «Ориентация и навигация подвижных объектов: современные информационные технологии», под ред. Б.С.Алешина, К.К.Веремеенко, А.И.Черноморского. - М.: ФИЗМАТЛИТ, 2006 г., стр.123-128). В результате работы блока 23 сопоставления координат экстремумов формируется ранжированный массив координат участков местности, в котором наиболее высокий ранг имеют участки, соответствующие экстремумам на нескольких изображениях одновременно.
В процессе функционирования предлагаемого устройства осуществляется автоматический выбор наиболее пригодных для коррекции участков местности путем анализа (а именно: выявления экстремумов - блок 22, пересчета координат экстремумов в координаты на местности и их ранжирования - блок 23) поля информативности, формируемого блоком 21. Для выбранных информативных участков происходит формирование эталонных изображений в активном (например, радиолокационном) или пассивном (например, оптическом) канале соответствующего диапазона спектра в зависимости от типа корреляционно-экстремальной системы коррекции траектории (наведения) летательного аппарата.
Массив координат участков местности с выхода блока 23 сопоставления экстремумов поля информативности поступает в блок 24 расчета яркостных эталонов. В блоке 24 по заранее введенным данным технических характеристик бортовых систем навигации (конечного наведения), параметрам программной траектории и ориентации ЛА осуществляется расчет яркостных эталонов для бортовых корреляционно-экстремальных систем с радиолокационными и/или оптико-электронными сенсорами. При этом блок 24 формирует яркостные эталонные радиолокационные изображения способом, аналогичным реализованному в прототипе. Эталонные же оптические изображения блок 24 формирует из фрагментов аэрофотоснимка (космоснимка), соответствующих наиболее информативным участкам местности. Размеры фрагмента определяются с учетом поля зрения бортового оптико-электронного сенсора, высоты полета ЛА и наклонной дальности визирования участка местности.
Каждое эталонное изображение с первого выхода блока 24 поступает на вход блока 25 буферной памяти. Со второго выхода блока 24 на вход триггера 18 поступает импульсный сигнал, опрокидывая его в такое состояние, при котором напряжение на его выходе открывает элемент И 13 для прохождения через него тактовых импульсов генератора 17. С этого момента начинается цикл формирования эталонного изображения.
Тактовые импульсы с элемента И 13 поступают на счетный вход счетчика 14, выход которого подключен к адресному входу блока 25 буферной памяти модуля 1 и к входу дешифратора 9. В соответствии с текущим номером тактового импульса из блока 25 модуля 1 считывается очередной элемент яркостного эталонного изображения, поступающий в сумматор-накопитель 2, где формируется строка эталонного изображения путем суммирования яркостей элементарных участков.
После считывания из памяти модуля 1 (блока 25) массива отсчетов очередной строки на выходе дешифратора 9 формируется импульсный сигнал, поступающий в блок 2 и элемент задержки 10. Импульс с выхода дешифратора 9 переписывает информацию о яркости данной строки из сумматора-накопителя 2 в соответствующие разряды регистра 3. Задержанный импульс дешифратора 9 с выхода элемента 10 задержки пересылает всю информацию из регистра 3 в блоки 61, …, 6N, 15. Коды яркостей строк эталонного изображения с выхода регистра 3 поступают на входы N параллельных каналов, каждый из которых содержит последовательно соединенные блок 61, …, 6N сравнения и коммутатор 71, …, 7N. При этом число N соответствует числу однородных зон, на которые разбивают эталонное изображение.
Первый вход каждого из N блоков сравнения подключен к выходу регистра 3, а второй его вход подключен к выходу соответствующей памяти 41, …,4N. В каждой памяти 41, …, 4N записан код, соответствующий средней яркости данной однородной зоны эталонного изображения.
С выхода регистра 3 каждый код яркостного эталонного изображения поступает одновременно на первые входы всех N блоков 61, …, 6N сравнения. На выходе того блока сравнения, два входных кода которого совпадают (код яркости очередной строки эталонного изображения и код средней яркости соответствующей однородной зоны), формируется сигнал, отпирающий коммутатор 11(7N), подключенный управляющим входом к выходу указанного блока 61(6N) сравнения.
В памяти 51, …, 5N записаны коды, соответствующие номерам однородных зон, средние яркости которых записаны в памяти 41, …, 4N. С выхода одной из памяти 51(5N) код номера однородной зоны через соответствующий открытый коммутатор 71(7N) проходит на вход блока 8 элементов ИЛИ, подключенного к первому входу сумматора 12. На второй вход сумматора 12 поступает код яркости очередной строки эталонного изображения с выхода блока 15 задержки. В сумматоре 12 в соответствующие разряды этого кода добавляется код номера однородной зоны, к которой принадлежит данная строка эталонного изображения. Указанный код номера однородной зоны поступает с выхода блока 8 элементов ИЛИ. Информация о номере однородной зоны заносится в специально отведенные свободные разряды кодового слова, не связанные переносами с остальными разрядами этого слова, содержащими код яркости. Поэтому суммирование кодов не приводит к искажению кода яркости строки. Блок-схемы сумматоров, обеспечивающих добавление в соответствующие разряды заданного кода, приведены, например, в книге «Цифровые радионавигационные устройства», под ред. В.Б.Смолова, М.: «Сов. Радио», 1980 г., стр.106.
На выходе сумматора 12 формируется код очередной строки эталонного изображения, содержащий информацию как о яркости данной строки, так и о принадлежности ее к одной из N однородных зон. Выходная информация сумматора 12 поступает в память 16. В счетчике 11 формируется текущий код номера строки эталонного изображения путем подсчета выходных импульсов элемента 10 задержки. По окончании записи в память 16 информации всех строк эталонного изображения на выходе дешифратора 19 формируется импульс, обнуляющий код в счетчиках 11, 14 и опрокидывающий триггер 18 в исходное состояние. При этом выходное напряжение триггера 18 запирает элемент И 13, запрещая прохождение через него тактовых импульсов генератора 17. На этом цикл формирования эталонного изображения заканчивается. Цикл повторяется для каждого формируемого блоком (модулем) 1 яркостного эталонного изображения.
В результате описанного взаимодействия блоков заявляемого технического решения формируются эталонные изображения информативных участков местности.
Предложенное техническое решение может быть реализовано, например, с использованием серийных программируемых логических интегральных схем (ПЛИС).
Применение заявляемого технического решения представляется целесообразным в системах планирования применения и подготовки полетных заданий летательных аппаратов, оснащенных бортовыми системами навигации (наведения) корреляционно-экстремального типа с радиолокационными (в т.ч. с синтезированием апертуры антенны) и/или оптико-электронными сенсорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ЭТАЛОННОЙ КАРТЫ МЕСТНОСТИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 1992 |
|
RU2022355C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2022356C1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| Устройство для отображения информации | 1989 |
|
SU1695373A1 |
| УСТРОЙСТВО СРАВНЕНИЯ ЦИФРОВЫХ ГИПЕРСПЕКТРАЛЬНЫХ АСТРОНОМИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2023 |
|
RU2817536C1 |
| Навигационная комбинированная оптическая система | 2018 |
|
RU2694786C1 |
| СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА ПО РАДИОЛОКАЦИОННЫМ ИЗОБРАЖЕНИЯМ ЗЕМНОЙ ПОВЕРХНОСТИ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВЫХ МОДЕЛЕЙ МЕСТНОСТИ | 2007 |
|
RU2364887C2 |
| КОМПЛЕКСНАЯ КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2525601C1 |
Изобретение относится к вычислительной технике и может быть использовано при формировании эталонной информации (изображений) для корреляционно-экстремальных навигационных систем летательных аппаратов (ЛА). Техническим результатом является повышение эффективности планирования и подготовки полетных заданий летательных аппаратов. Устройство автоматизированного формирования эталонной информации для навигационных систем содержит: блоки памяти, сумматоры, регистры, блоки сравнения группы, коммутаторы группы, блоки элементов И/ИЛИ, дешифраторы, счетчики, блоки задержки, генератор тактовых импульсов, триггер, логический блок подготовки яркостных эталонов, включающий блок преобразования исходных картографических данных, аэрофотоснимков и космоснимков, формирователь одноканального или многоканального поля информативности, блок поиска экстремумов поля информативности, блок сопоставления экстремумов поля информативности каждого из каналов, блок расчета эталонных изображений, блок буферной памяти и связи между указанными элементами. 2 ил.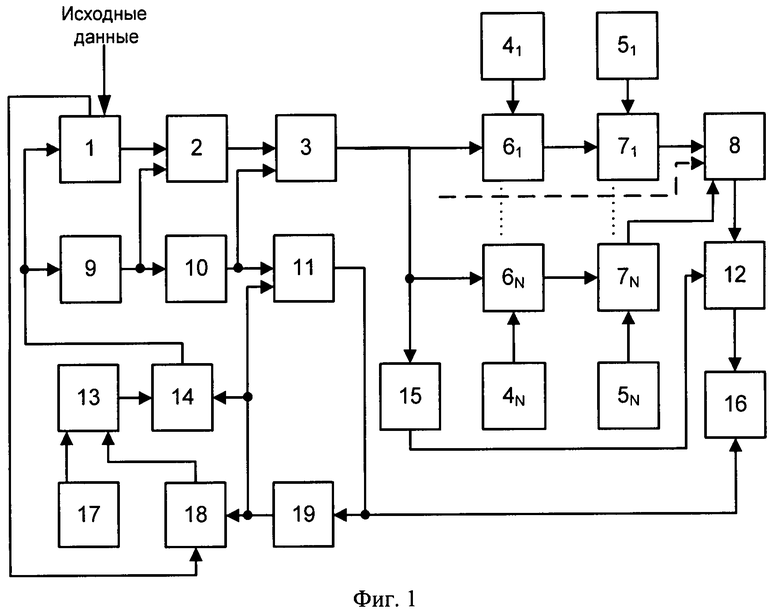
Устройство автоматизированного формирования эталонной информации для навигационных систем, содержащее блоки памяти, сумматоры, регистры, блоки сравнения группы, коммутаторы группы, блоки элементов И/ИЛИ, дешифраторы, счетчики, блоки задержки, генератор тактовых импульсов, триггер, отличающееся тем, что в него введен логический блок подготовки яркостных эталонов, включающий блок преобразования исходных картографических данных, аэрофотоснимков и космоснимков, формирователь одноканального или многоканального поля информативности, блок поиска экстремумов поля информативности, блок сопоставления экстремумов поля информативности каждого из каналов, блок расчета эталонных изображений, блок буферной памяти, причем первый выход блока преобразования исходных картографических данных соединен с входом формирователя поля информативности, второй выход блока преобразования исходных картографических данных соединен с первым входом блока сопоставления экстремумов поля информативности, выход формирователя поля информативности соединен с входом блока поиска экстремумов поля информативности, выход блока поиска экстремумов поля информативности соединен со вторым входом блока сопоставления экстремумов поля информативности, выход блока сопоставления экстремумов поля информативности соединен с входом блока расчета эталонных изображений, первый выход блока расчета эталонных изображений соединен с первым входом блока буферной памяти, второй выход блока расчета эталонных изображений соединен с входом триггера, второй вход блока буферной памяти соединен с выходом счетчика, выход блока буферной памяти соединен с входом сумматора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ю.Е | |||
| СЕДАКОВА"), 27.09.2006 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

