Изобретение относится к системам формирования эталонных радиолокационных изображений (ЭРЛИ), используемым при подготовке полетного задания для корреляционно-экстремальных систем навигации летательных аппаратов (ЛА) по картам местности.
Прототипом является известная система, содержащая блок управления и синхронизации, основное запоминающее устройство (ЗУ), буферное ЗУ, блок сложения и блок памяти.
Для корреляционно-экстремальных систем навигации ЛА, решающих в полете задачу определения координат движущихся объектов с помощью сравнения радиолокационных карт местности, в состав полетного задания включается ЭРЛИ, представляющее собой массив чисел, пропорциональных величинам эффективной поверхности рассеяния радиоволн элементарными участками местности. Исходная информация о высоте и отражающих свойствах элементарных участков хранится в основном запоминающем устройстве.
В процессе подготовки полетного задания для каждого положения ЛА, задаваемого блоком управления и синхронизации, в буферное запоминающее устройство считывается информация, соответствующая наблюдаемой местности при движении по программной траектории полета. Формирование ЭРЛИ производят построчно, при этом яркость каждой строки, пропорциональную соответствующей эффективной поверхности рассеяния, получают, суммируя в блоке яркости элементарных участков в пределах прямоугольной области, длина которой определяется размером строки, а ширина - видом диаграммы направленности антенны РЛС, с весовыми коэффициентами, учитывающими вид диаграммы в азимутальной плоскости. В результате в блоке памяти формируют ЭРЛИ заданного размера с учетом отражающих свойств и геометрии визирования участка местности.
Известная система формирования ЭРЛИ для корреляционно-экстремальных систем навигации ЛА по картам местности имеет недостаток, заключающийся в том, что использование сформированных прототипом яркостных ЭРЛИ для навигации ЛА в сложных погодных условиях и в различные времена года приводит к появлению аномально больших ошибок определения координат ЛА. Указанный недостаток обусловлен тем, что детальное яркостное ЭРЛИ обычно готовят для выбранных опорных участков местности, используя усредненные характеристики отражающих элементов поверхности. В то же время реальное подробное РЛИ, наблюдаемое бортовой РЛС в полете, состоит из откликов, флюктуирующих по амплитуде. Поэтому даже в пределах участков местности, содержащих однородные зоны (по характеру отраженного сигнала), интенсивность сигнала непостоянна, что приводит к неоднородности получаемого РЛИ. Кроме того, различные погодные условия (дождь, солнце) или смена сезонов (зима, лето) приводят к изменению отражающих свойств местности. При этом относительная интенсивность отраженного сигнала для различных однородных зон может существенно меняться, что приводит к появлению дополнительных различий между эталонным и наблюдаемым радиолокационным изображением РЛИ. Для устранения погрешностей определения координат ЛА, обусловленных указанными факторами, осуществляют, например, определение координат ЛА путем сравнения среднего уровня сигнала в пределах каждой однородной области ЭРЛИ с соответствующим средним уровнем сигнала, принятого от участков местности, ограниченных границами указанных однородных зон. Использование зонной структуры наблюдаемого РЛИ, соответствующей структуре однородных зон ЭРЛИ, позволяет оценить реализованное среднее значение сигнала в пределах заданных областей. Погодные и сезонные условия вызывают изменения отражающих свойств участков местности, однако границы между различными однородными зонами обладают устойчивостью к указанным факторам, что обеспечивает высокую точность определения координат ЛА с помощью зонной структуры РЛИ в любых погодных и сезонных условиях.
Яркостное ЭРЛИ, формируемое прототипом, не содержит информации о структуре однородных зон местности, что не позволяет использовать его без изменений в различных погодных и сезонных условиях для навигации ЛА по картам местности. В этом случае для каждых конкретных условий полета ЛА необходимо формировать новое яркостное ЭРЛИ с помощью прототипа.
Целью изобретения является повышение точности решения навигационной задачи в сложных метеорологических условиях.
Сущность изобретения заключается во введении в систему дополнительного блока оценки информативности, первым входом подключенного к выходу первого ЗУ, а выходом - к второму входу регистра, последовательно соединенных первого вентиля, сигнальным входом подключенного к выходу генератора тактовых импульсов, первого счетчика, первого дешифратора, входом подключенного также к адресному входу канала считывания первого ЗУ, первого блока задержки, входом подключенного также к входам синхронизации сумматора-накопителя и блока оценки информативности, второго счетчика, счетным входом подключенного также к установочному входу регистра, второго дешифратора, входом подключенного также к адресному входу канала записи второго ЗУ, RS-триггера, R-входом подключенного также к обнуляющим входам первого и второго счетчиков, S-входом - к шине "Пуск", а R-выходом - к управляющему входу первого вентиля, во введении N параллельных каналов, каждый из которых содержит последовательно соединенные блок сравнения, первым входом подключенный к выходу регистра, и второй вентиль, выходом подключенный к одному из N входов введенного блока ИЛИ, выход которого подключен к первому входу блока сложения, выход которого подключен к информационному входу второго ЗУ, а также второго блока задержки, входом подключенного к выходу регистра, а выходом - к второму входу блока сложения, N первых блоков памяти, выход каждого из которых подключен к второму входу соответствующего блока сравнения, и N вторых блоков памяти, выход каждого из которых подключен к сигнальному входу соответствующего вентиля.
В результате введения в систему указанных блоков и связей оценивают информативность опорных участков местности, сравнивают яркость каждого элемента ЭРЛИ с набором из N значений яркостей, соответствующих разбиению ЭРЛИ на N однородных зон, и присваивают этому элементу код номера однородной зоны, яркость которой совпадает с яркостью указанного элемента. Окончательное формирование ЭРЛИ производят из кодов, содержащих информацию о яркости, информативности и номере однородной зоны опорных участков местности. При этом структура нового ЭРЛИ полностью соответствует наблюдаемому РЛИ, используемому для определения координат ЛА, что повышает точность навигации при использовании заявляемой системы в различных сезонных и погодных условиях.
На фиг. 1 представлена блок-схема заявляемого устройства; на фиг. 2 - формирователя оценки коэффициента информативности.
Устройство содержит память 1, сумматор 2, регистр 3, памяти 4 первой группы, памяти 5 второй группы, блоки 6 сравнения группы, коммутаторы 7 группы, блок 8 элементов ИЛИ, дешифратор 9, элемент 10 задержки, счетчик 11, сумматор 12, элемент И 13, счетчик 14, формирователь 15 оценки коэффициента информативности, блок 16 задержки, память 17, генератор 18 тактовых импульсов, триггер 19, дешифратор 20.
Формирователь 15 оценки коэффициента информативности содержит блок 21 задержки, вычитатель 22, квадратор 23, умножитель 24, регистры 25, 26, сумматор 27, делитель 28, пороговый блок 29, вычитатель 30, блок 31 задержки, умножитель 32, регистры 33-35.
В заданный момент времени по шине "Пуск" поступает импульсный сигнал на S-вход триггера 19, опрокидывая его в такое состояние, при котором напряжение на его R-выходе открывает элемент И 13 для прохождения через него тактовых импульсов генератора 18. С этого момента начинается цикл формирования ЭРЛИ.
Тактовые импульсы с элемента И 13 поступают на счетный вход счетчика 14, выход которого подключен к адресному входу канала считывания памяти 1 и к входу дешифратора 9. В памяти 1 записан массив отсчетов цифровой карты местности, представляющий собой коды яркостей элементарных участков земной поверхности в пределах опорного участка местности в зоне предполагаемой работы бортовой РЛС.
В соответствии с текущим номером тактового импульса из памяти 1 считывается очередной элемент цифровой карты местности, поступающий в сумматор-накопитель 2, где формируется строка ЭРЛИ путем суммирования яркостей элементарных участков. Одновременно в формирователе 15 оценивается информативность каждой строки ЭРЛИ.
В системе используется критерий оценки качества участков местности с точки зрения их пригодности для решения задач навигации ЛА с помощью корреляционно-экстремальных систем. Участок местности, содержащий много "похожих" изображений или фрагментов, имеет малую информативность, в то время как участок, на котором все изображения существенно различны, обладает большой информативностью. Используемое понятие информативности не зависит от вида конкретного алгоритма сравнения изображений, реализованного в бортовой аппаратуре корреляционно-экстремальной системы навигации, так как оно определяет потенциальные возможности распознавания на данном участке местности. В соответствии с этим критерием информативности участка местности считается величина, определяющая предельно достижимую точность привязки входящих в него изображений и равная
I = K/ σ2, где σ2 - дисперсия привязки наблюдаемого изображения в плоскости ЭРЛИ;
К - коэффициент пропорциональности, определяемый размерами изображений.
Величина σ2 определяется выражением
σ2= 1/
 (a
(a )2c1+a
)2c1+a c
c , где a'i- значение первой производной яркости i-го элементарного участка по координате (номеру отсчета);
, где a'i- значение первой производной яркости i-го элементарного участка по координате (номеру отсчета);
a''1 - значение второй производной яркости i-го элементарного участка по координате (по номеру отсчета).
Коэффициенты с1 и с2 определяются статистикой действующих искажений радиолокационного изображения, находятся аналитически или методом статистического моделирования и заносятся в память формирователя 15.
В соответствии с используемым показателем информативности вычитатель 22 находит значения разностей яркостей соседних элементарных участков, т.е. определяет величину а'1. Значения первых разностей яркостей элементарных участков с выхода вычитателя 22 последовательно поступают в регистр 26, с выхода которого информация поступает в квадратор 23, на первый вход вычитателя 30 и в блок 31 задержки. Вычитатель 30 определяет значения вторых разностей яркостей элементарных участков с соседними номерами, т.е. величину a''1. На выходе квадратора 23 формируется величина [a1']2, поступающая на первый вход умножителя 24, на второй вход которого из регистра 25 поступает постоянный коэффициент с1. С выхода умножителя 24 величина [a1']2с1 поступает на первый вход сумматора 27.
Вторые разности яркостей элементарных участков a1'' с выхода вычитателя 30 поступают в регистр 34, с выхода которого подаются на первый вход умножителя 32, на второй вход которого подается значение постоянного коэффициента с2, хранящееся в регистре 35. На выходе умножителя 32 формируется величина [a1''] c2, поступающая на второй вход сумматора 27. С выхода сумматора 27 сигнал, пропорциональный величине
 (a
(a )2c1+a
)2c1+a c
c , поступает в делитель 28, на другой вход которого подается значение постоянного коэффициента К, хранящееся в регистре 25. На выходе делителя 28 формируется величина, пропорциональная информативности данного участка местности и равная
, поступает в делитель 28, на другой вход которого подается значение постоянного коэффициента К, хранящееся в регистре 25. На выходе делителя 28 формируется величина, пропорциональная информативности данного участка местности и равная
I=K/
 (a
(a )2c1+a
)2c1+a c
c .
.
Выходной сигнал делителя 28 подается на вход порогового блока 29, в котором записано значение пороговой информативности.
По сигналу с выхода дешифратора 9 осуществляется сравнение выходного сигнала делителя 28 с порогом в блоке 29. Если информативность данного участка больше заданного порогового уровня, то с выхода порогового блока 29, являющегося выходом формирователя 15 оценки коэффициента информативности, в один из разрядов регистра 3 поступает единичный код, который совместно с кодом остальных разрядов регистра 3, пропорционального яркости данной строки, включают состав полетного задания ЛА, записываемого в памяти 4. Если информативность исследуемого участка ниже определенного порогового уровня, то на выходе блока 29 формируется нулевой код, записываемый в соответствующий разряд регистра 3.
После считывания из памяти 1 массива отсчетов очередной строки на выходе дешифратора 9 формируется импульсный сигнал, поступающий в блоки 2, 10, 15. Импульс с выхода дешифpатоpа 9 переписывает информацию о яркости данной строки из сумматора-накопителя 2 в соответствующие разряды регистра 3 и пересылает код информативности из формирователя 15 в выделенный для него разряд в регистре 3. Задержанный импульс дешифратора 9 с выхода элемента 10 задержки пересылает всю информацию из регистра 3 в блоки 61, ..., 6N, 16.
Коды яркостей строк ЭРЛИ с выхода регистра 3 поступают на входы N параллельных каналов, каждый из которых содержит последовательно соединенные блок 61, ..., 6N сравнения и коммутатор 71, ..., 7N. При этом число N соответствует числу однородных зон, на которые разбивают ЭРЛИ. Первый вход каждого из N блоков сравнения подключен к выходу регистра 3, а второй его вход подключен к выходу соответствующей памяти 41, ..., 4N. В каждой из N памяти 41, . . . , 4N записан код, соответствующий средней яркости данной однородной зоны ЭРЛИ.
С выхода регистра 3 каждый код яркостного ЭРЛИ поступает одновременно на первые входы всех N блоков 61, ..., 6N сравнения. На выходе того блока сравнения, два входных кода которого совпадают (код яркости очередной строки ЭРЛИ и код средней яркости соответствующей однородной зоны), формируется сигнал, отпирающий коммутатор 71 (7N), подключенный управляющим входом к выходу указанного блока 61 (6N) сравнения.
В памяти 51, ..., 5N записаны коды, соответствующие номерам однородных зон, средние яркости которых записаны в памяти 41, ..., 4N. С выхода одной из памяти 51 (5N) код номера однородной зоны через соответствующий открытый коммутатор 71 (7N) проходит на вход блока 8 элементов ИЛИ, подключенного к первому входу сумматора 12. На второй вход сумматора 12 поступает код яркости и информативности очередной строки ЭРЛИ с выхода блока 16 задержки. В сумматоре 12 в соответствующие разряды этого кода добавляется код номера однородной зоны, к которой принадлежит данная строка ЭРЛИ. Указанный код номера однородной зоны поступает с выхода блока 8 элементов ИЛИ. Информация о номере однородной зоны заносится в специально отведенные свободные разряды кодового слова, не связанные переносами с остальными разрядами этого слова, содержащими код яркости и информативности. Поэтому суммирование кодов не приводит к искажению кода яркости строки. Блок-схемы сумматоров, обеспечивающих добавление в соответствующие разряды заданного кода, приведены, например, в книге Цифровые радионавигационные устройства. / Под ред. В.Б. Смолова, М.: Сов. радио, 1980, с. 106.
На выходе сумматора 12 формируется код очередной строки ЭРЛИ, содержащий информацию как о яркости данной строки, так и о принадлежности ее к одной из N однородных зон. Выходная информация сумматора 12 поступает в память 17, на адресный вход канала записи которого поступает код счетчика 11. В счетчике 11 формируется текущий код номера строки ЭРЛИ путем подсчета выходных импульсов элемента 10 задержки. По окончании записи в память 17 информации всех строк ЭРЛИ на выходе дешифратора 20 формируется импульс, обнуляющий код в счетчиках 11, 14 и опрокидывающий триггер 19 в исходное состояние. При этом выходное напряжение триггера 19 запирает элемент И 13, запрещая прохождение через него тактовых импульсов генератора 18. На этом цикл формирования ЭРЛИ заканчивается.
В результате описанного взаимодействия блоков заявляемой системы на основе исходного яркостного ЭРЛИ опорного участка местности формируют новое зонное ЭРЛИ, в котором каждый элемент, наряду с информацией об информативности и яркости поверхности, содержит данные о принадлежности к одной из N однородных зон. Такое ЭРЛИ обладает устойчивостью к погодным и сезонным изменениям отражающих свойств поверхности и может быть использовано для определения координат ЛА корреляционно-экстремальными системами с высокой точностью в любых метеоусловиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2022356C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО ФОРМИРОВАНИЯ ЭТАЛОННОЙ ИНФОРМАЦИИ ДЛЯ НАВИГАЦИОННЫХ СИСТЕМ | 2012 |
|
RU2520386C1 |
| Система для распознавания дактилоскопических отпечатков | 1991 |
|
SU1836696A3 |
| УСТРОЙСТВО СРАВНЕНИЯ ЦИФРОВЫХ ГИПЕРСПЕКТРАЛЬНЫХ АСТРОНОМИЧЕСКИХ ИЗОБРАЖЕНИЙ | 2023 |
|
RU2817536C1 |
| УСТРОЙСТВО ДЛЯ ДИСКРЕТНОЙ ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2141737C1 |
| ЦИФРОВОЙ ПРИЕМНИК СПУТНИКОВОЙ НАВИГАЦИИ | 1995 |
|
RU2090902C1 |
| Устройство для подсчета минимального значения интенсивности размещения в многопроцессорных кубических циклических системах при однонаправленной передаче информации | 2018 |
|
RU2688236C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛОВ | 2000 |
|
RU2195014C2 |
| СПОСОБ И УСТРОЙСТВО РАДИОАКТИВНОГО КАРОТАЖА | 1996 |
|
RU2092876C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
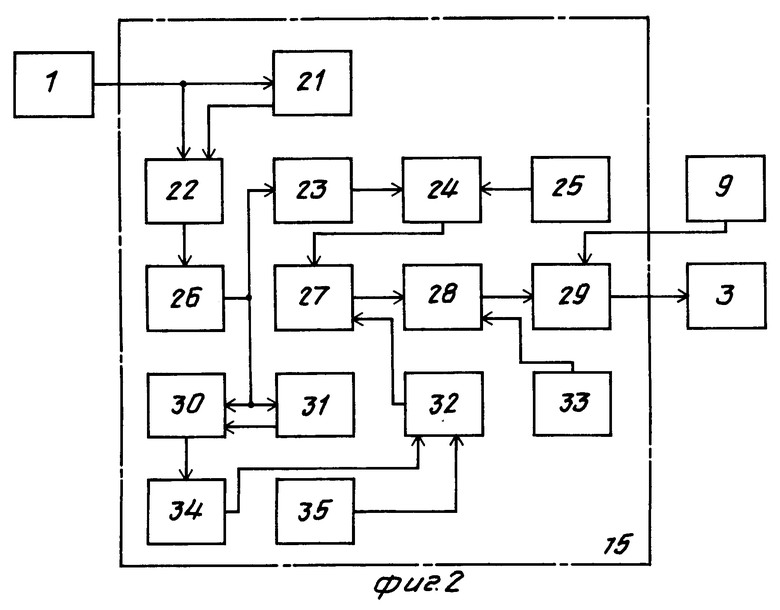
Изобретение относится к вычислительной технике и может быть использовано для формирования эталонной карты местности навигационных систем. Устройство содержит память 1, сумматор 2, регистр 3, памяти 4 первой группы, памяти 5 второй группы, блоки 6 сравнения группы, коммутаторы 7 группы, блок 8 элементов ИЛИ, дешифратор 9, элемент 10 задержки, счетчик 11, сумматор 12, элемент И 13, счетчик 14, формирователь 15 оценки коэффициента информативности, блок 16 задержки, память 17, генератор 18 тактовых импульсов, триггер 19, дешифратор 20. Изобретение позволяет повысить точность формирования карты местности, что влияет на повышение точности навигационной системы. 1 з. п.-лы, 2 ил.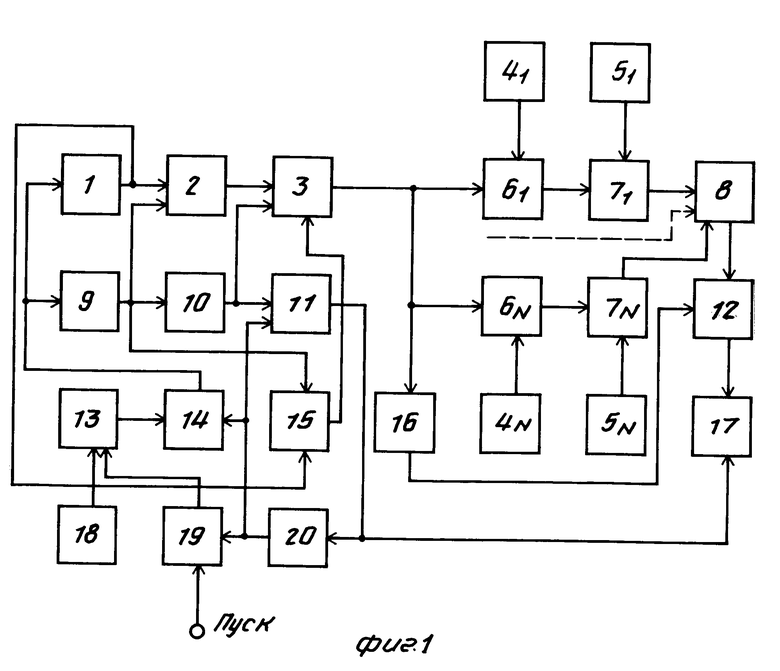
| Патент США N 3764719, кл | |||
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |
